
Fターム[5H505EE51]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | PWM制御を行うもの (2,285) | 一周期中のパルスの数を切り換えるもの (149) | 切換を円滑に行うもの (80)
Fターム[5H505EE51]に分類される特許
1 - 20 / 80
自動車
【課題】モータに過電圧が作用したり過電流が流れたりするのを抑制する。
【解決手段】駆動輪の回転数の減少時に、モータを駆動するインバータの制御方式を矩形波制御方式から過変調制御方式に切り替える矩形波過変調切替条件が成立したときにおいて(S530,S540)、駆動輪の回転数減少率ΔNwが所定値Nref以下のときには過変調制御方式に切り替え(S600)、駆動輪の回転数減少率ΔNwが所定値Nrefより大きいときには過変調制御方式を経由せずに正弦波制御方式に直接切り替える(S610)。
(もっと読む)
回転電機制御装置

【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
駆動装置
【課題】モータの絶縁破壊を抑制する。
【解決手段】正弦波制御や過変調制御(パルス幅変調制御)によってインバータを制御するときで変調率αが閾値αref以上のときには(S120,S130)、正弦波制御や過変調制御(パルス幅変調制御)によってインバータを制御するときで変調率αが閾値αref未満のときや、矩形波制御によってインバータを制御するときの上限電圧VHlim(=VH1)に比して低い上限電圧VHlim(=VH1・β)を設定する(S150)。そして、設定した上限電圧VHlim以下の範囲内で駆動電圧系電力ラインの電圧VHを調節する(S160,S170)。
(もっと読む)
インバータ制御装置、インバータ装置、及び空気調和機
【課題】スイッチング損失を低減するとともに、制御方式の切り替えを円滑に行うことを目的とする。
【解決手段】2アーム変調方式を採用し、正弦波状の基準電圧指令信号を補正して第1電圧指令信号を生成する第1信号生成部21と、正弦波状の基準電圧指令信号にその第3次高調波成分を重畳させた波形の振幅の最大値が搬送波の振幅以上になるような過変調方式による第2電圧指令信号を生成する第2信号生成部22と、第1信号生成部21の基準電圧指令信号の振幅が、該基準電圧指令信号の最大振幅値に設定された第1閾値未満の場合に第1電圧指令信号を選択し、該基準電圧指令信号の振幅が該第1閾値と等しい場合に第2電圧指令信号を選択する選択部23と、選択部23によって選択された電圧指令信号と搬送波とを比較することによりパルス幅変調信号を生成するPWM信号生成部とを備えるインバータ制御装置を提供する。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】少なくとも1つの制御モードがフィードフォワード制御とフィードバック制御とを併せ持っている場合でも、制御切替時におけるトルク変動を抑制することを目的とする。
【解決手段】フィードフォワード制御を行う非干渉制御部25を備える第1制御部11と、非干渉制御部25による調整量を用いる第2制御部12とを切り替えて採用する場合において、第2制御部12が採用されている場合に、第2制御部12によって設定された第2電圧指令値と非干渉制御部25による調整量とを用いて第1制御部11のPI制御器が備える積分器の初期値を設定する第1プリセット部20と、第1制御部11が採用されている場合に、第1制御部11によって設定された第1電圧指令値と非干渉制御部25による調整量とを用いて第2制御部12のPI制御器が備える積分器の初期値を設定する第2プリセット部30とを備えるモータ制御装置を提供する。
(もっと読む)
モータ制御装置
【課題】モード変更時の電流の急変を防止する。
【解決手段】PI演算部26は、モータ14の出力トルク指令に基づいて算出したモータの電流指令と、実際に計測したモータの実電流の差である電流偏差に基づき、前記電流偏差に比例ゲインを乗算して得た比例項と、前記電流偏差の積分値に積分ゲインを乗算して得た積分項を算出し、得られた比例項および積分項に基づいてモータへの供給電圧指令を算出する。そして、モータの制御モードとして、PWM制御によりリミットの掛かった正弦波出力を得る過変調モードと、PWM制御によって正弦波出力を得るPWMモードと、を有し、過変調制御モードからPWM制御モードに移行する際に、前記電流偏差が大きい場合には、前記比例ゲインを小さく変更する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
インバータの制御装置
【課題】 可変速度範囲が広く、かつ、低損失のモータ駆動システムを実現する。
【解決手段】 インバータの制御装置100は、非同期PWMモードと、同期PWMモードとを有するゲート信号生成部101と、非同期/同期切替部102とを有する。非同期/同期切替部102は、ゲート信号生成部101が同期PWMモードでインバータ10に与えるゲート信号を生成しているとき、インバータ10からモータ20に供給される電流のうちd軸電流が正になったか否かを判定し、判定結果が肯定的である場合にゲート信号生成部のゲート信号の生成モードを非同期PWMモードに切り替える。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
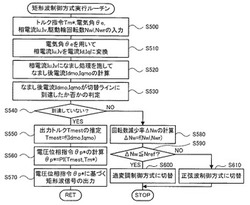
モータ駆動制御システムおよびそれを搭載する車両、ならびにモータ駆動制御システムの制御方法
【課題】交流電動機を駆動するモータ駆動制御システムにおいて、矩形波制御からPWM制御への切換えの際の制御安定性を向上する。
【解決手段】モータ駆動制御システム100は、インバータ140により交流電動機200を駆動する。ECU300は、矩形波制御モードおよびパルス幅変調制御モードのいずれかの制御モードによってインバータ140を制御する。ECU300は、矩形波制御モードの実行中に、交流電動機200へ印加される電流位相φi#がしきい値φthに到達したことに応じて、矩形波制御モードからパルス幅変調制御モードへ切換える。そして、ECU300は、矩形波制御モードの実行中に、交流電動機200へ印加される電圧位相φvの変化に基づいて電流位相φi#のしきい値φthを変化させる。
(もっと読む)
回転電機の制御装置
【課題】回転電機や電力変換器の内部状態に応じて回転電機を制御していないため、ユーザの満足度や燃費(電費)の向上に問題点があった。
【解決手段】トルク指令から電機子電流指令を生成する総磁束制御指令部101を有し、この総磁束制御指令部から出力される電機子電流指令に基づいて電力変換器20によって回転電機30の電機子電流を制御する回転電機の制御装置において、回転電機30または電力変換器20の内部状態により運転モードを判定する運転モード判定部120と、運転モード判定部の出力である運転モードから回転電機を制御するためのパラメータを生成するモータ定数生成部121を備え、モータ定数生成部で生成したパラメータに基づいて総磁束制御指令部101の演算が行われるようにした。
(もっと読む)
インバータ制御装置
【課題】インバータの制御がPWM領域においてはスイッチング周波数に悪影響を及ぼさず、1パルス領域においては運転周波数に関らず電流偏差量の少ない電流応答が得られる制御装置を提供する。
【解決手段】実施形態は、PWM用補正電流基準と電動機電流との比較に基づいて、電動機を駆動するインバータのスイッチング制御信号を直接発生し、制御モードが電動機の中低速域ではPWM制御、高速域では1パルス制御と自動移行する電流追従型PWM制御回路を用いたインバータ制御装置において、電動機の磁束及びトルクを制御すべくベクトル演算して得られた電流基準と、電動機電流との偏差を増幅する定常偏差補正回路と、前記定常偏差補正回路出力信号を前記電流基準に加算してPWM用補正電流基準を演算する加算回路と、電流追従制御型PWM制御回路がPWM制御モードで動作しているとき、前記定常偏差補正回路での制御を積分制御に設定し、1パルスモードで動作しているとき比例積分制御に切換える切換え回路とを具備する。
(もっと読む)
電気自動車
【課題】電動機の制御性が低下するのを抑制する。
【解決手段】制御モードCmが正弦波制御モードや過変調制御モードのときにモータのトルク指令Tm*が急変しているときには(S170,S190)、トルク指令Tm*に基づいて比例項のゲインKp1,Kp2や積分項のゲインKi1,Ki2を設定すると共に設定したゲインを用いたフィードバック制御によって電圧指令Vd*,Vq*を設定してインバータを制御する(S210〜S230)。また、制御モードCmが矩形波制御モードのときにモータのトルク指令Tm*が急変しているときには(S170,S240)、トルク指令Tm*に基づいて比例項のゲインKp3や積分項のゲインKi3を設定すると共に設定したゲインを用いたフィードバック制御によって電圧位相指令θ*を設定してインバータを制御する(S260〜S280)。
(もっと読む)
回転電機制御装置
【課題】2相変調によりインバータをスイッチング制御する際にも安定した3相交流が励起されるように、2相変調パルスを生成する。
【解決手段】3相の内の少なくとも1相を所定の固定期間TFの間ハイ状態又はロー状態に固定して、他相を変調する2相変調によりインバータをスイッチング制御する2相変調パルスSPを生成する2相変調パルス生成部は、固定期間TFを回転電機の回転に同期させて固定パルスを生成すると共に、固定期間TF以外の期間TMではパルス幅変調により変調パルスを生成する。
(もっと読む)
インバータ制御装置および車両
【課題】変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるようにする。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータの端子を直流電源の正極及び負極のそれぞれに接続するスイッチング素子を備えるインバータを操作することでモータジェネレータの制御量を制御するに際し、回転速度の上昇に伴って制御性を維持することが困難となること。
【解決手段】スイッチング素子の操作信号を規定する1電気角周期分のパターン波形に基づき、インバータを操作する。パターン波形のパルス間隔がデッドタイムよりも短くなる場合、隣接するパルス信号を伸張補正する。ここで、図10(a)は、第1象限におけるパターン波形について、論理「H」のパルスの間隔がデッドタイムよりも短くなった場合を示し、図10(b)は、第1象限におけるパターン波形について、論理「L」のパルスの間隔がデッドタイムよりも短くなった場合を示す。
(もっと読む)
交流電動機の駆動制御装置
【課題】制御モードを切り替えることなくシームレスで交流電動機を駆動制御することができる駆動制御装置を提供する。
【解決手段】制御目標である基準電圧信号Vanを正弦波信号と矩形波信号の加算信号として修正し、矩形波の度合いを角度パラメータDeltaで調整する。Deltaを0から60まで連続的に変化させることで、修正された基準電圧信号も正弦波信号から矩形波信号に変化する。修正された基準電圧信号をPWM変調してインバータを駆動することで、磁束軌跡は円形から六角形まで連続的に変化し、単一制御モードで駆動される。
(もっと読む)
1 - 20 / 80
[ Back to top ]