
Fターム[5H505EE53]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | PWM制御を行うもの (2,285) | 瞬時値制御 (25)
Fターム[5H505EE53]に分類される特許
1 - 20 / 25
回転機の制御装置
【課題】モデル予測制御において想定したモータジェネレータのモデルと実際のモータジェネレータの特性とにずれがある場合等にあっては、電流の予測精度が低下するため、制御性が低下するおそれがあり、これを改善する。
【解決手段】電流センサ16によって検出される実電流は、dq変換部22によって実電流id,iqに変換される。予測部33は、dq変換部22の出力する実電流id,iqを初期値として用いて、モータジェネレータ10を流れる電流を予測し、予測電流ide,iqeを算出する。フィードバック制御部40は、予測電流ideを実電流idにフィードバック制御するための操作量(補正量Δid)を算出し、フィードバック制御部44は、予測電流iqeを実電流iqにフィードバック制御するための操作量(補正量Δiq)を算出する。
(もっと読む)
回転機の制御装置

【課題】電流センサ16にオフセット誤差が生じる場合、モデル予測制御の制御性が低下するおそれがあること。
【解決手段】電流再現部22は、電流センサ16の検出する母線電流IDC等をdq変換することで実電流id,iqを算出し、予測部33に出力する。UVW変換部40の出力する予測電流iue,ive,iweは、セレクタ42によって選択的に偏差算出部44に出力される。一方、母線電流IDCは、セレクタ46を介して、そのままの値か、乗算器48によって「−1」が乗算された値かのいずれかが偏差算出部44に出力される。偏差算出部44では、セレクタ46の出力に対するセレクタ42の出力の差を算出し、フィードバック制御部50に出力する。フィードバック制御部50では、偏差算出部44の出力値をゼロにフィードバック制御するための操作量を算出する。
(もっと読む)
回転機の制御装置
【課題】予測電流ide,iqeと指令電流idr,iqrとの差が所定範囲内となることで現在の操作状態を維持する場合、モータジェネレータ10の電流を急激に変化させる操作状態が採用されているおそれがあり、これにより所定範囲内に留まる期間が短くなること。
【解決手段】予測電流ide,iqeと指令電流idr,iqrとの差が閾値以下且つ規定値以上である相対速度評価領域内にある場合、予測電流ide,iqeの変化速度を小さくする操作状態への変更を検討する。これにより、規定値以下の領域に留まる時間を伸長させることができ、ひいては高調波電流を抑制しつつもスイッチング状態の切替頻度を低減することができる。
(もっと読む)
回転機の制御装置
【課題】直流交流変換回路のスイッチング素子をオン・オフ操作することで回転機を流れる電流、トルク、および磁束の少なくとも1つを有した制御量を制御する新たな回転機の制御装置を提供する。
【解決手段】予測部33によって予測された予測電流ide,iqeのベクトルと、指令電流のベクトルidr,iqrとの差の内積値にオフセット値Δを加算したものである評価関数Jを最小とする操作状態(電圧ベクトル)が、インバータIVの操作状態として決定される。矩形波制御時においては、トルクフィードバック制御によって定まる位相に応じた操作状態以外の評価関数Jにおけるオフセット値Δを増大させる。
(もっと読む)
電力変換装置
【課題】スイッチング損失を抑制できる電力変換装置を提供する。
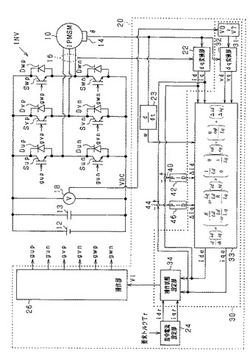
【解決手段】電力変換装置140において、制御回路172は、モータジェネレータ192の回転状態に応じた電気角ごとのパルス波形を表すPHMパルスを、U相、V相、W相の各相について生成する。そして、生成した各相のPHMパルスに基づいて、U相、V相、W相のうちPHMパルスの電圧値が他の2相とは異なるいずれか1相を特定し、その特定した1相について、PHMパルスの電圧値を所定のゼロベクトルトリガ信号の周期ごとに反転させ、その反転後のPHMパルスおよび他の2相のPHMパルスに基づくゼロベクトル再配置型PHMパルス信号を、制御信号としてドライバ回路174へ出力する。
(もっと読む)
インバータ制御装置および車両
【課題】変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるようにする。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
(もっと読む)
制御装置
【課題】スイッチングノイズがレゾルバの検出角度に与える影響が適切に考慮された制御装置を実現する。
【解決手段】レゾルバ44の検出角度を取得する検出角度取得部27と、交流電動機4の回転速度に関連付けられた第一補正情報M1及び変調率に関連付けられた第二補正情報M2の双方を、検出角度を補正するための補正情報Mとして記憶する補正情報記憶部25と、検出角度取得部27が検出角度を取得した角度取得時点における回転速度が回転速度閾値以上である場合に、当該回転速度に基づき第一補正情報M1を取得し、角度取得時点における回転速度が回転速度閾値未満である場合に、当該角度取得時点における変調率に基づき第二補正情報M2を取得する補正情報取得部26と、補正情報取得部26が取得した補正情報Mに基づき検出角度を補正する検出角度補正部28と、を備える。
(もっと読む)
回転機の制御装置
【課題】PWM制御を行う場合、スイッチング素子のスイッチング状態の切替回数が多くなり、スイッチング状態の切り替えに伴う損失が問題となりやすいこと。
【解決手段】位相設定部32では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを算出する。一方、ノルム設定部33では、要求トルクTrおよび電気角速度ωを入力としてノルムVnを設定する。そして、デッドタイム算出部34では、電源電圧VDCとノルムVnとに基づき、矩形波制御におけるデッドタイムDTを電気角度間隔として算出する。位相補正部35では、位相設定部32による位相δを「DT/2」によって補正する。矩形波信号生成部36では、補正された位相δとデッドタイムDTと回転角度θとに基づき、操作信号g*#(*=u,v,w;#=p,n)を生成する。
(もっと読む)
制御装置
【課題】矩形波制御に基づく制御の実行時に処理負荷を適切に低減することが可能な制御装置を実現する。
【解決手段】制御モード決定部20と、電圧指令値決定部33,43と、制御信号生成部23と、制御モード決定部20により決定された制御モードがパルス幅変調制御モードである場合に、制御信号生成部23の演算周期を、キャリア周期の1/2に設定された基準演算周期のN倍(Nは1以上の整数)の第一周期に設定するとともに、電圧指令値決定部43の演算周期を、第一周期のM倍(Mは2以上の整数)の第二周期に設定する演算周期設定部21と、を備え、演算周期設定部21は、制御モード決定部20により決定された制御モードが矩形波制御モードである場合に、電圧指令値決定部33の演算周期及び制御信号生成部23の演算周期の双方を、第二周期に設定する。
(もっと読む)
回転センサレス制御装置
【課題】同期電動機の回転センサレス制御であって、インバータの直流側の電圧よりも無負荷誘起電圧が大きい領域を含めた全領域で、フリーランからの再起動を実現する。
【解決手段】一実施例に係る回転センサレス制御装置は、同期機を駆動するインバータを制御する回転センサレス制御装置において、前記同期機のインダクタンス及び誘起電圧の両方を使用して回転子の位相角及び角速度を推定する位相角・角速度推定手段と、前記インバータ及び電動機のフリーランからの起動時に、非零電圧ベクトルのみを選択するPWMを用いて、電圧指令値を生成すると共に前記インバータの出力電流を制御する制御手段とを具備し、前記位相角・角速度推定手段は、前記電圧指令値及びインバータ出力電流を用いて、前記回転位相角・角速度を推定する。
(もっと読む)
回転機の制御装置
【課題】過変調領域においてモデル予測制御を行なうと、制御量の平均値と指令値との間に乖離が生じること。
【解決手段】操作状態決定部34の評価関数Jは、電圧ベクトルVi(i=0〜7)のそれぞれに対応する予測電流ide,iqeと指令電流idr,iqrとの差が小さいほど、該当する電圧ベクトルを高く評価する。評価関数Jの評価が最も高い電圧ベクトルが次回の操作状態に設定される。位相遅れ補償器50,60では、予測電流ide,iqeの高調波成分を減衰させる処理を行なう。過変調領域において、評価関数Jの入力パラメータを予測電流ide,iqeそのものから位相遅れ補償器50,60の出力に切り替える。
(もっと読む)
多相インバータ装置
【課題】過渡的な動作状態であっても効率良く脈動電流の発生を抑制することが可能な多相インバータ装置を提供する。
【解決手段】PWM制御に用いるデューティ信号を生成するためのキャリア波形として、基準となるキャリア信号を非反転とするか、反転するかを、キャリア周期毎、及び各相毎にそれぞれ独立に決定するキャリア波形選択手段を備える。そして、このキャリア波形選択手段は、一の相でキャリア信号の反転或いは非反転を選択する際に、この一の相の、瞬時実相電流と、瞬時デューティ指令値、及び他の相のうち既にキャリア波形が選択された全ての相の瞬時実相電流と、瞬時デューティ指令値と、キャリア波形の選択結果と、に基づき、半導体モジュールの入力電流のリップルの大きさを評価する評価式を用いて選択する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御によりスイッチング状態の切替数が増大すること。
【解決手段】現在の操作状態を表現する電圧ベクトルV(n)について、予測電流ベクトルIdqeと指令電流ベクトルIdqrとの誤差ベクトルedqのノルム|edq|が閾値ethよりも大きい場合、この一連の処理を実行する。ここで、現在の操作状態を表現する電圧ベクトルV(n)が有効電圧ベクトルである場合(ステップS34:YES)、平均電圧ベクトルVaとのなす角度が規定角度A(≦20°)以下のものがあるか否かを判断する(ステップS38:YES)。そして、肯定判断される場合、ゼロ電圧ベクトルの優先度が高いとし(ステップS40)、これに関する誤差ベクトルedqのノルム|edq|が閾値eth以下と判断される場合(ステップS42)、ゼロ電圧ベクトルを採用する(ステップS46)。
(もっと読む)
交流電動機の駆動制御装置及び基準磁束演算装置
【課題】制御モードを切り替えることなくシームレスで交流電動機を駆動制御する。
【解決手段】基本コンポーネント演算器34は、トルク誤差等に応じて基本係数を演算する。デルタ演算器36は、基本係数に応じ、基本係数が増加するに従って0度から60度まで順次増加するように非切替領域の角度Deltaを演算する。基準磁束軌跡演算器32は、角度Deltaを用いて基準磁束の軌跡を演算し、最大基準磁束ψmax*及び最小基準磁束ψmin*を演算する。切替パターン演算部34は、磁束がψmax*とψmin*との間にあり、位相角がDelta内のときにはインバータ26の出力電圧ベクトルを切り替えることなく維持する。これにより、インバータ電圧が高周波スイッチングから矩形形状にシームレスに変化していく。
(もっと読む)
電力変換装置の制御方法
【課題】出力電圧が異なる2つのDC電源のうちの、一方のDC電源から他方のDC電源に、高効率で電力を供給することが可能な電力変換装置の制御方法を提供する。
【解決手段】2つのDC電源1-1、1-2の低電位側が共通電力線にて接続され、且つ、この共通電力線とモータ2がグランドスイッチを介して接続され、DC電源1-1の高電位側とモータ2が第1スイッチを介して接続され、且つ、DC電源1-2の高電位側とモータ2が第2スイッチを介して接続される。そして、DC電源1-1、及びDC電源1-2の各出力電力を指令する電力指令(Pcmd_vdc1、Pcmd_vdc2)と、各DC電源1-1、1-2の各出力電圧(Vdc_1、Vdc_2)と、電圧指令(vd*、vq*)と、モータ電力(Pm)とに基づき、第1スイッチ、第2スイッチの双方をオン、オフ操作する電源直列運転状態でモータ2の駆動電圧を出力する。
(もっと読む)
同期モータ用インバータ制御回路及びこれを備える同期モータ制御装置
【課題】制御開始前の同期モータの挙動を高精度に把握できる同期モータ用インバータ制御回路を提供する。
【効果】同期モータ用インバータ制御回路500では、ブラシレスモータの回転子の初期角速度が認識される際に低振動数とされるキャリア周波数の搬送波を用いることができるので、当該初期角速度の検出時には、検出抵抗から出力される検出電流の波形幅が拡張し、検出電流を認識する検出タイミングでは所望の電圧ベクトルに対応した検出電流の値が認識され、これにより、同期モータ用インバータ制御回路500では、回転子の初期角速度が正確に把握されることとなる。
(もっと読む)
永久磁石形同期電動機の駆動装置
【課題】誘導電動機を駆動するよりも高効率で、かつ、インバータやマトリックスコンバータを駆動するよりも小型で低コストな、永久磁石形同期電動機の駆動装置を提供する。
【解決手段】駆動装置50のパルス生成手段55は、出力電圧が電源電圧による出力可能範囲外になった場合に、オン時間演算手段542により演算されたオン時間によるスイッチングパタンに最も近く、かつ、出力可能範囲内となるスイッチングパタンを実現するパルスを生成する。
(もっと読む)
多相電動機駆動装置
【課題】キャリア同期方式のメリットを生かしつつ、直流電源の電圧と電流の振動を抑制することのできる多相電動機駆動装置を得る。
【解決手段】少なくとも4相の巻線を有し、各巻線相互間は電気的に絶縁され、かつ磁気的に結合された多相電動機1と、各巻線にそれぞれ接続され、直流電力を交流電力に変換する少なくとも4台の単相パルス幅変調方式のインバータ回路11と、各11に直流電力を供給する直流電源2と、各11毎の主回路を構成するIGBTのゲートに、基準信号とキャリアの比較制御によって得られるゲート信号を与えて各11の主回路を制御する電流制御回路12と、各12のキャリアを生成する基準となるキャリア同期信号を与えるキャリア同期信号源5と、各11の線間電圧のオンするタイミングが分散するように各制御回路のキャリアの位相をシフトさせる位相補正回路34を備えたもの。
(もっと読む)
回転機の制御装置、及び回転機の制御システム
【課題】インバータを操作することでモータジェネレータの実際のトルクを要求トルクTdに制御するに際し、高い電圧利用率が要求される領域においてその制御性が低下すること。
【解決手段】位相設定部34では、要求トルクTdと推定トルクTeとの差に基づき、インバータの出力電圧ベクトルの位相δを設定する。ノルム設定部36では、モータジェネレータの電気角速度ωと要求トルクTdとに基づき、インバータの出力電圧ベクトルのノルムVnを設定する。操作信号生成部38では、インバータの入力電圧(電源電圧VDC)及びノルムVnに基づき算出される電圧利用率に応じた操作信号波形を検索し、この検索された操作信号波形を有する信号の出力タイミングを位相δに基づき設定する。
(もっと読む)
モータ制御装置およびハイブリッド自動車用制御装置
【課題】交流モータをインバータで駆動するモータ制御装置において、PWM駆動から矩形波駆動への切り替え時のトルク脈動を低減できるモータ制御装置およびハイブリッド自動車用制御装置を提供することにある。
【解決手段】モータコントロールユニット100は、インバータ8にPWM信号を入力して交流モータ4をPWM駆動するPWM駆動モードと、インバータ8に矩形波信号を入力して交流モータ4を矩形波駆動する矩形波駆動モードとを有する。駆動パルス切替部140は、PWM駆動モードから矩形波駆動モードに切り替える際には、PWM駆動時のハイレベルのパルス若しくはローレベルのパルスの最大幅パルスの範囲内で切替える。
(もっと読む)
1 - 20 / 25
[ Back to top ]