
Fターム[5H505GG07]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 制御系を切り換えるもの (162)
Fターム[5H505GG07]に分類される特許
1 - 20 / 162
モータ制御装置
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
油圧ユニット

【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、回転電機の回転数の急変時に、制御切替を迅速に行うことで、回転電機に過電流が流れることを有効に抑制することである。
【解決手段】回転電機制御システム10は、回転電機(第2モータジェネレータ)14と、回転電機14の所定時間当たりの回転数を測定する回転数センサ34と、制御部32とを含む。制御部32は、回転数の測定結果に応じて、回転電機14の制御方法の切り替えの際に用いる制御切替閾値である制御切替位相を変更する閾値変更部48を有する。
(もっと読む)
同期電動機の制御システム
【課題】
同期電動機を120度通電方式から180度通電方式に切り替える際に、切換速度より小さい速度付近で120通電方式のでは電流位相が進んで力率が悪化する問題があった。停止状態から中高速域に至る広い速度範囲において、トルクショックの小さいシームレス駆動を行うことができる同期電動機の制御システムを提供する。
【解決手段】
同期電動機を120度通電方式で起動し、その後、180度通電方式に切り替えて駆動する制御システムで、120度通電方式から180度通電方式へ切り替える際に、120度通電中の力率を改善する力率改善手段を設け、この力率の改善された120度通電方式から180度通電方式に切り替えて同期電動機を駆動する。
(もっと読む)
車両走行制御システム
【課題】車両走行制御システムにおいて、昇圧切替線と降圧切替線の間に動作点がある場合に、適切に降圧して損失を低減することである。
【解決手段】車両走行制御システム10は、回転電機14、蓄電装置20、電圧変換器24、インバータ回路28等と、制御装置30を含む。制御装置30は、回転電機14の動作点を取得する動作点取得部40と、取得した動作点が、昇圧状態に適した領域にあるか、降圧状態に適した領域にあるかを区別する動作点領域判定部42と、動作点が昇圧切替線側から降圧切替線に近づいて予め定めた降圧機会増加線の領域にあるかどうかを判断する降圧機会増加領域判定部44と、降圧機会増加領域にあるときに、車両走行状態を変更することで電圧変換器24の動作点を移動させて降圧状態に変更する降圧状態変更部46を含む。
(もっと読む)
車両走行制御システム
【課題】車両走行制御システムにおいて、昇圧切替線と降圧切替線の間に動作点がある場合に、適切に降圧して損失を低減することである。
【解決手段】車両走行制御システム10は、回転電機14、蓄電装置20、電圧変換器24、インバータ回路28等と、制御装置30を含む。制御装置30は、回転電機14の動作点を取得する動作点取得部40と、取得した動作点が、昇圧状態に適した領域にあるか、降圧状態に適した領域にあるかを区別する動作点領域判定部42と、回転電機14の動作点がほとんど移動せずに滞留している場合にその滞留時間が予め定めた滞留閾値時間以上であるかどうかを判断する滞留時間判定部44と、滞留時間が滞留閾値時間以上のときは、降圧状態に変更する降圧状態変更部46を含む。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
モータ駆動用インバータ制御回路およびそれを用いた電気掃除機
【課題】商用電源と蓄電池を併用する場合においても、小型で安価な構成の効率の高いインバータ制御回路を提供することを目的とする。
【解決手段】インバータ制御回路は商用電源1を入力とし、交流電圧を整流する全波整流用ダイオードブリッジ3と、全波整流用ダイオードブリッジ3に接続され整流された電圧を昇圧する昇圧回路6と、昇圧回路6の入力側に蓄電池4を有し、商用電源1または蓄電池4のいずれか一方を電源として使用するための切換え手段と、直流電力から交流電力に変換するインバータ9と、インバータ9を制御しPWM制御またはPAM制御でモータ10を駆動する制御手段12とを備え、制御手段12は、商用電源1を電源として使用する場合は、PWM制御でモータ10を駆動し、蓄電池4を電源として使用する場合は、PAM制御でモータ10を駆動させる構成とした。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ制御装置
【課題】モード変更時の電流の急変を防止する。
【解決手段】PI演算部26は、モータ14の出力トルク指令に基づいて算出したモータの電流指令と、実際に計測したモータの実電流の差である電流偏差に基づき、前記電流偏差に比例ゲインを乗算して得た比例項と、前記電流偏差の積分値に積分ゲインを乗算して得た積分項を算出し、得られた比例項および積分項に基づいてモータへの供給電圧指令を算出する。そして、モータの制御モードとして、PWM制御によりリミットの掛かった正弦波出力を得る過変調モードと、PWM制御によって正弦波出力を得るPWMモードと、を有し、過変調制御モードからPWM制御モードに移行する際に、前記電流偏差が大きい場合には、前記比例ゲインを小さく変更する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
モータ制御装置
【課題】d軸とq軸の相互干渉成分を補正してモータを制御するモータ制御装置において、モータの制御状態が変化した際に発生する電流の脈動や収束遅れを抑えることができるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、補正値生成部104と、フィルタ部105とを備えている。補正値生成部104は、d軸電流指令Id*、q軸電流指令Iq*、角速度ωに基づいてd軸とq軸の相互干渉成分を補正するためのd軸補正値、q軸補正値を生成する。フィルタ部105は、d軸補正値、q軸補正値に含まれる周波数成分のうち、特定の周波数成分を通過させる。しかも、車両駆動用モータM1の制御状態に応じて、その特性が変化する。そのため、車両駆動用モータM1の制御状態が変化した際に発生する高周波成分を適切に除去することができる。従って、車両駆動用モータM1の制御状態が変化した際に発生する電流の脈動や収束遅れを抑えることができる。
(もっと読む)
モータ制御装置
【課題】試験体を回転させるモータの回転数の制御の精度を向上させることが可能なモータ制御装置を提供する。
【解決手段】レゾルバ34及びエンコーダ35は、モータ33の回転数を検出する。トルクメータ36は、モータ33のトルクを検出する。フィードバック制御部23は、目標の回転数と目標のトルクとを示すパラメータマップに従って、目標の回転数でモータ33が回転するように、又は、目標のトルクをモータ33が出力するように、レゾルバ34によって検出された回転数、及びトルクメータ36によって検出されたトルクに基づいて、モータ33の動作をフィードバック制御し、トルクの変動幅が閾値以上となる場合、レゾルバ34によって検出された回転数とエンコーダ35によって検出された回転数とから求められる回転数に基づいて、モータ33の動作をフィードバック制御する。
(もっと読む)
回転機の制御装置
【課題】低変調率領域と高変調率領域とで制御手法を切り替える場合、制御手法の切り替えに起因してインバータの出力に変動が生じやすいこと。
【解決手段】電流フィードバック制御の操作量としての指令電圧vdr,vqrに応じた指令振幅VPと、指令相電圧位相θu,θv,θwと、3相の指令電圧vur,vvvr,vwrとに基づき、PWM信号生成部34では、PWM信号gu,gv,gwを生成する。ここでは、「0〜π/2」の期間において、指令振幅VPに基づき、インバータIVの出力電圧が直流電圧源の負極電圧となる期間を指定し、正極電圧となる期間は、上記負極電圧となる期間と正極電圧となる期間との一対の期間の平均電圧を指令電圧vur,vvr,vwrに近似させるように設定する。
(もっと読む)
同期機制御装置
【課題】トルクと磁束とを独立して操作できるような電流制御系の構成するとともに、高速駆動時のような同期機の電気角周波数(回転速度)に対する電力変換手段のキャリア周波数の比が小さく、電流フィードバック制御が困難となる条件下においても、電機子鎖交磁束に基づいたトルク指令生成とトルク指令への追従性の向上を図る。
【解決手段】 同期機1の運転条件に応じて、磁束指令生成器5から出力される磁束指令と磁束演算器6から出力される推定電機子鎖交磁束とを切り換えて電機子鎖交磁束を出力するとともに、第2の電圧指令生成器32の出力の有効無効を切り換える信号を出力する磁束設定器8と、磁束指令と推定電機子鎖交磁束との差分に基づいて磁化電流指令を生成する磁化電流指令生成器9とを備えている。
(もっと読む)
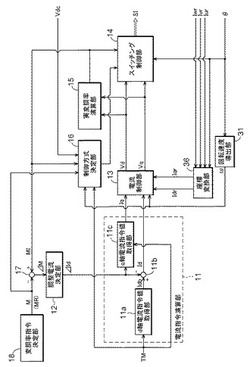
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
電気自動車
【課題】要求駆動力で走行しながら昇降圧コンバータの共振を抑制する。
【解決手段】昇圧異常が生じたときには、車速が値0以上車速A未満の範囲ではLoギヤに設定し、車速が車速A以上車速B未満の範囲ではHiギヤに設定し、車速が車速B以上車速C未満の範囲ではLoギヤに設定し、車速が車速以上ではHiギヤに設定する昇圧異常時変速関係と車速とに基づいて目標変速段を設定し、モータを駆動するインバータを選択した制御モードで制御すると共に変速段が目標変速段になるよう変速機を制御する。これにより、走行に要求トルクで走行しながらモータの回転数が共振帯域に入るのを抑制することができ、昇降圧コンバータの共振を抑制することができる。
(もっと読む)
1 - 20 / 162
[ Back to top ]