
Fターム[5H505JJ04]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 推定・予測演算、シミュレートを行うもの (608)
Fターム[5H505JJ04]に分類される特許
1 - 20 / 608
モータ制御装置
回転機の制御装置
回転機の制御装置
線電流検出装置および電力変換システム
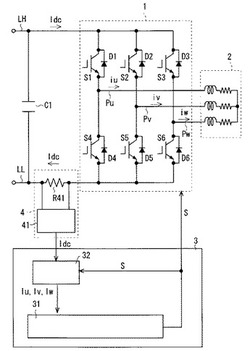
【課題】たとえスイッチングパターンが長期間に渡って維持されるとしても、線電流を得ることができる線電流検出装置を提供する。
【解決手段】スイッチング制御部31はスイッチング素子S1〜S6のスイッチングパターンを制御して相電圧を交流線Pu,Pv,Pwに印加させる。相電圧は交流の1周期において略1パルス波形を有する。電流検出部4は直流線LH,LLを流れる直流電流Idcを検出する。線電流取得部32はスイッチングパターンが変化する第1タイミングの前の第1時点において検出された直流電流Idcを第1時点でのスイッチングパターンによって決定される第1相の線電流として推定し、第1タイミングの後の第2時点において検出された直流電流Idcを第2時点でのスイッチングパターンによって決定される第2相の線電流として推定する。
(もっと読む)
インバータ装置

【課題】速度センサレス制御により電動機を駆動するものにおいて、フリーラン状態の電動機の回転速度を精度良く同定することができるインバータ装置を提供する。
【解決手段】本実施形態のインバータ装置は、電動機の回転速度を検出する速度検出手段を用いることなく速度センサレス制御により電動機を駆動する電動機制御部を備えたインバータ装置である。電動機制御部は、電動機がフリーラン状態であるときの回転速度を所定のパラメータを用いた条件に基づいて同定する速度サーチ機能と、電動機を実際の運転条件に基づいて運転させながらパラメータをティーチングするティーチング機能とを有する。
(もっと読む)
モータ制御装置
【課題】 少ないメモリ容量のトルク補正データで、負荷トルク変動および発生トルク変動を抑制するとともに、モータをより平滑に駆動し、モータを内蔵した圧縮機の振動および騒音を抑制することができるモータ制御装置を提供する。
【解決手段】 補正データ作成部21は、回転位置検出部19によって更新された回転位置情報に基づいて、補正用正弦波データテーブル20から、負荷トルク変動補正データとと発生トルク変動補正データとを読み出し、読み出した発生トルク変動補正データをトルク定数の周期変動成分kとする。そして、トルク定数の周期変動成分kから、発生トルク変動補正データicを求め、負荷トルク変動補正データiと発生トルク変動補正データicとを合算し、合算したトルク変動補正データをPWM作成部18に送る。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
誘導電動機の回転子時定数推定装置
【課題】本発明は、周辺環境または運転条件の影響を少なく受けて、常に一定水準のトルクを発生する誘導電動機の回転子時定数推定装置を提供する。
【解決手段】本発明は、d軸電流指令及びq軸電流指令を受信して、q軸電圧指令を出力し、q軸電圧推定値を出力して、前記q軸電圧指令と前記q軸電圧推定値との差である回転子時定数の変動値を出力し、前記回転子時定数の変動値を回転子時定数に加算して、変更された回転子時定数を出力する。
(もっと読む)
車両駆動用誘導電動機の制御装置
【課題】トルク推定の精度を向上させることができる、車両駆動用誘導電動機の制御装置。
【解決手段】上位コントローラ110から入力されるトルク指令Tmrefおよび二次磁束指令φ2refに基づいて、車両駆動用誘導電動機108を高周波駆動するインバータ107に制御信号を出力するモータコントローラ109は、インバータ107の駆動周波数ω1を設定する一次周波数演算部219と、誘導電動機108の三相電流値を検出するモータ電流値検出部209と、検出された三相電流値をd軸電流値Idおよびq軸電流値Iqに変換する座標変換部223と、誘導電動機108の出力トルクを推定するトルク推定部211と、を備え、トルク推定部211は、モータ電流値検出部209による電流検出からトルク推定までの電流位相変化を補正する位相補償量と、d軸電流値およびq軸電流値とに基づいて、出力トルクTmを推定する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
モータ制御用温度モニタシステム
【課題】本発明は、モータ制御用温度モニタシステムに係り、モータ制御の正確性・信頼性を確保すべく、インバータ又はコンバータに生ずる温度について精度の高いモニタを実現することにある。
【解決手段】モータ制御を行うインバータ又はコンバータに生ずる温度に応じた信号を出力する温度センスダイオードの出力信号を上記温度を高精度に示す高精度信号に変換し、温度センスダイオードの出力信号を処理して上記温度を検出し、変換手段により得られた上記高精度信号を処理して上記温度を検出し、それら検出される温度に応じて、インバータ又はコンバータを駆動するうえで用いるキャリア周波数を制限する。また、キャリア周波数に基づいて上記温度が入ると予想される予想温度範囲を設定し、上記の如く検出される温度のうちその設定される上記予想温度範囲内に入る温度を、キャリア周波数を制限するうえで用いる上記温度として選択する。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
回転機の制御装置及び回転角算出装置
【課題】R/Dコンバータ36bによって算出される回転角に含まれる遅れ誤差がモータジェネレータの制御に及ぼす影響を抑制することのできる回転機の制御装置を提供する。
【解決手段】遅れ補正量設定部B14において、モータジェネレータの回転子の回転速度ωが高いほど、回転角の進角側への補正量である遅れ補正量Cδを大きく設定する処理を行う。そして、加算部B15において、設定された遅れ補正量Cδによって上記回転角を補正する処理を行う。さらに、誤差補正部B16によって、回転角に含まれる変動誤差を除去する処理を行う。これら処理は、R/Dコンバータ36b内にて行われる。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
永久磁石同期電動機駆動システムのパラメータ推定装置
【課題】本発明は、永久磁石同期電動機駆動システムのパラメータ推定装置を提供する。
【解決手段】本発明の推定装置は、リアルタイム磁束推定を介してインダクタンスと永久磁石による鎖交磁束を推定して、永久磁石同期電動機の運転性能を向上する。
(もっと読む)
油圧ユニット
【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】モータを駆動するインバータのスイッチングモードを決定するための演算処理負荷を大幅に低減すること。
【解決手段】αβ座標系において、インバータ12の6つの非ゼロベクトルスイッチングモードV1〜V6により印加される電圧に応じて、それぞれモータ10に流れる電流のベクトルIvec1〜Ivec6が、ゼロベクトル電流Iα0、Iβ0に対して固定した方向に定められる。その点に着目し、それら電流ベクトルIvec1〜Ivec6の中から、指令電流値Iα*、Iβ*に最も近い電流ベクトルIveckを特定する。そして、特定した電流ベクトルIveckに応じた非ゼロベクトルスイッチングモードVkにてインバータ12を動作させた場合の、非ゼロベクトル電流Idk、Iqkのみを演算するようにした。このため、演算処理負荷を大幅に低減することが可能となる。
(もっと読む)
モータ制御装置、圧縮機およびヒートポンプ装置
【課題】実際の負荷トルクの変動態様に一層一致するようにトルク変動を補償する。
【解決手段】電流演算手段は、モータの巻線電流に基づいてd軸電流およびq軸電流を求める。速度制御手段は、回転速度が指令回転速度に一致するように指令d軸電流および指令q軸電流を生成する。電流制御手段は、d軸電流およびq軸電流が指令d軸電流および指令q軸電流に一致するように制御する。トルクデータ演算手段は、モータの回転角度に応じて記憶手段から基準負荷トルクデータを読み出し、その基準負荷トルクデータからゼロ点設定値を減算するとともにゲインを与えた負荷トルクデータを求める。変化傾向判断手段は、速度変動幅演算手段が求める回転速度の変動幅の変化傾向を判断する。ゲイン調整手段は、回転速度の変動幅が減少傾向であると判断されるようにゲインの値を調整する。補正手段は、負荷トルクデータをモータのトルク定数で除算した電流に基づいて指令q軸電流補正値を演算し、その指令q軸電流補正値により指令q軸電流を補正する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
1 - 20 / 608
[ Back to top ]