
Fターム[5H505JJ24]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 比例積分回路 (515)
Fターム[5H505JJ24]に分類される特許
1 - 20 / 515
電力変換装置
電気自動車用モータ制御方法
モータ制御装置、制御方法及びプログラム
【課題】磁気飽和を回避することにより、モータを安定的に制御する。
【解決手段】d軸電圧Vd或いはq軸電圧Vqの目標増加量が、所定の値以上となったときには、vdリミッタ制御部或いはvqリミッタ制御部によって、信号vd1、及び信号vd2の増加が制限される。これにより、信号vd1、及び信号vd2に示されるリラクタント電圧の増加量及びマグネット電圧の増加量が制限され、モータ90の出力が急峻に変化することがなくなる。
(もっと読む)
電力変換装置

【課題】PLL回路の位相誤差を素早く補正する電力変換装置を提供する。
【解決手段】交流電動機3を駆動するインバータ装置2と、これを直接駆動するバイパス開閉器25と、PLL制御手段4とで構成する。PLL制御手段4は、電圧検出器23の検出電圧とインバータ装置2の内部位相との位相差を検出する位相差検出手段と、この位相差をPI制御器43によって比例積分制御し、切り替え器44を介して補正前内部位相とするPI制御手段と、位相差を切り替え器46を介して出力し、これを補正前内部位相に加えて内部位相とする位相補正手段と、位相差を微分し、開閉器48を介してPI制御器43の積分初期値とする積分初期値設定手段とを有する。出力開閉器24が投入されて所定時間経過後、切り替え器44の入力を0からPI制御器43の出力に切り替え、切り替え器46の入力を短期間0から位相差に切り替えた後再び0に戻し、且つ開閉器48を閉路する。
(もっと読む)
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3が、低保持力の永久磁石である可変磁石を備えた可変磁束モータ3aであり、回転数に応じて可変磁石に磁化電流を供給し磁束を制御することにより、可変磁束モータ3aが所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
モータを制御するための方法およびシステム
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
インバータ装置
【課題】速度センサレス制御により電動機を駆動するものにおいて、フリーラン状態の電動機の回転速度を精度良く同定することができるインバータ装置を提供する。
【解決手段】本実施形態のインバータ装置は、電動機の回転速度を検出する速度検出手段を用いることなく速度センサレス制御により電動機を駆動する電動機制御部を備えたインバータ装置である。電動機制御部は、電動機がフリーラン状態であるときの回転速度を所定のパラメータを用いた条件に基づいて同定する速度サーチ機能と、電動機を実際の運転条件に基づいて運転させながらパラメータをティーチングするティーチング機能とを有する。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置
【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
モータ制御装置
【課題】 少ないメモリ容量のトルク補正データで、負荷トルク変動および発生トルク変動を抑制するとともに、モータをより平滑に駆動し、モータを内蔵した圧縮機の振動および騒音を抑制することができるモータ制御装置を提供する。
【解決手段】 補正データ作成部21は、回転位置検出部19によって更新された回転位置情報に基づいて、補正用正弦波データテーブル20から、負荷トルク変動補正データとと発生トルク変動補正データとを読み出し、読み出した発生トルク変動補正データをトルク定数の周期変動成分kとする。そして、トルク定数の周期変動成分kから、発生トルク変動補正データicを求め、負荷トルク変動補正データiと発生トルク変動補正データicとを合算し、合算したトルク変動補正データをPWM作成部18に送る。
(もっと読む)
誘導電動機の回転子時定数推定装置
【課題】本発明は、周辺環境または運転条件の影響を少なく受けて、常に一定水準のトルクを発生する誘導電動機の回転子時定数推定装置を提供する。
【解決手段】本発明は、d軸電流指令及びq軸電流指令を受信して、q軸電圧指令を出力し、q軸電圧推定値を出力して、前記q軸電圧指令と前記q軸電圧推定値との差である回転子時定数の変動値を出力し、前記回転子時定数の変動値を回転子時定数に加算して、変更された回転子時定数を出力する。
(もっと読む)
自動車
【課題】モータに過電圧が作用したり過電流が流れたりするのを抑制する。
【解決手段】駆動輪の回転数の減少時に、モータを駆動するインバータの制御方式を矩形波制御方式から過変調制御方式に切り替える矩形波過変調切替条件が成立したときにおいて(S530,S540)、駆動輪の回転数減少率ΔNwが所定値Nref以下のときには過変調制御方式に切り替え(S600)、駆動輪の回転数減少率ΔNwが所定値Nrefより大きいときには過変調制御方式を経由せずに正弦波制御方式に直接切り替える(S610)。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータが一定速度で回転されているとき、d軸電流指令値及びq軸電流指令値を各々零に設定する補正制御部と、電流指令値と検出電流との偏差の積分値を生成する電流制御部と、生成された積分値を測定する積分値測定部と、を備え、補正制御部は、測定された積分値が予め定められている範囲内の値となるように調整することで前記モータの回転位置に対する補正値を調整する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
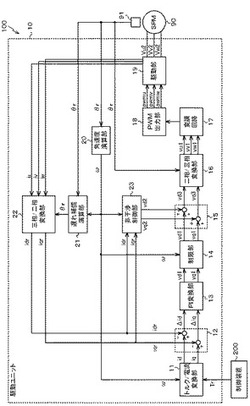
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
モータ駆動制御装置
【課題】バッテリの過充電を確実に防止する。
【解決手段】バッテリ10からの直流電力をインバータ12で交流電力に変換しモータ14を駆動する。この際、モータの制御は、d軸電圧指令Vdとq軸電圧指令Vqを用いてベクトル制御する。そして、インバータ12をPWM制御するPWM固定モードを有し、このPWM固定モードにおいて、d軸電圧指令Vdを0にしても、前記モータにおけるq軸電流Iqが負となり前記モータから回生電流が発生する場合に、q軸電流Iqが0以上となるようにd軸電圧指令Vdまたは電圧指令ベクトルのq軸とのずれ角αを制御する。
(もっと読む)
1 - 20 / 515
[ Back to top ]