
Fターム[5H505MM10]の内容
交流電動機の制御一般 (51,584) | 保護、補償、監視、表示、防止 (2,003) | 脱調、乱調の保護、防止 (62)
Fターム[5H505MM10]に分類される特許
1 - 20 / 62
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
インバータ制御装置

【課題】インバータ制御装置の運転停止中に誘導電動機が負荷機械側の外力により回された後に再起動したとき、誘導電動機が予想外に動くことを防止できるようにしたインバータ制御装置を得る。
【解決手段】誘導電動機3をベクトル制御によって駆動するインバータ制御装置10において、インバータの運転信号が停止している間、インバータ出力電圧及び電流の座標変換に用いる基準位相を保持する手段17、18を備える。
(もっと読む)
電動機制御装置
【課題】電力変換器の電圧が飽和していない状態と飽和した状態で自動切り替えを行い、電圧が飽和しても電動機のトルク制御を一定の応答特性で実現できるようにすること。
【解決手段】d軸電流指令とd軸電流の差、q軸電流指令とq軸電流の差を、それぞれ比例増幅器331、積分増幅器332、積分器333、及び比例増幅器334、積分増幅器335、積分器336に入力し、d軸電圧指令Vd*、q軸電圧指令Vq*を出力する。qd軸非干渉補償器337、dq軸非干渉補償器338は、d軸、q軸の干渉を補償する。出力電圧が飽和していない状態では、不感帯要素33Eを遮断状態としリミッタを導通状態とすることにより、磁束電流とトルク電流の独立した電流フィードバック制御を実現する。また、出力電圧が飽和した状態では、不感帯要素33Eを能動状態としトルク電流をトルク電流指令に追従させ、磁束電流は磁束電流指令への追従を放棄する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】d軸電流を同期起動制御に用いることなく、d軸電流を用いた同期起動制御からセンサレス制御に切り替えるときに生じる急加速や急減速等による振動、騒音を低減するとともに、電流の跳ね上がり等制御及び動作の不安定を回避する。
【解決手段】ブラシレスDCモータ1の制御装置2であって、前記モータ1の同期始動制御をq軸電流を用いて行うとともに、前記同期始動制御からセンサレス制御に移行する際に、前記モータ1の回転速度として位置推定器が前記q軸電流から算出した推定速度を用いて行うことを特徴とする。
(もっと読む)
インバータ制御装置および車両
【課題】変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるようにする。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
(もっと読む)
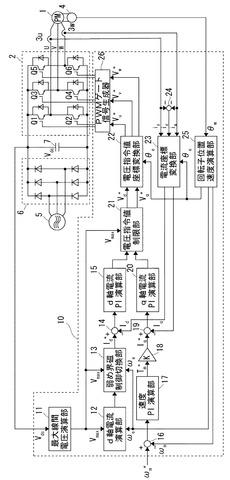
永久磁石同期電動機の駆動装置
【課題】永久磁石同期電動機が脱調により停止した時点で脱調を確実に検出する機能を備えた永久磁石同期電動機の駆動装置を提供する。
【解決手段】永久磁石同期電動機30をインバータ20により駆動するための駆動装置であって、インバータ20の直流電流に基づいて電動機30の脱調を検出するようにした永久磁石同期電動機の駆動装置において、インバータ20の直流電流の振動成分を抽出するフィルタ51と、このフィルタ51により抽出した振動成分の振幅を演算する振動成分振幅演算器54と、この演算器54により演算した振幅が所定の基準値よりも小さくなったときに電動機30が脱調状態にあることを検出する脱調検出手段52Aと、を備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、誘起電圧二乗和Esq_αβが、所定の閾値E1を超えるか否かを判定する(ステップ602)。また、モータ回転角速度推定値ωm_eが所定の閾値ω1よりも低いか否かを判定する(ステップ603)。そして、その誘起電圧二乗和Esq_αβが最高速回転状態に対応する最大領域にあるにもかかわらず(Esq_αβ>E1、ステップ602:YES)、モータ回転角速度推定値ωm_eは非回転状態を示す最小領域にある(ωm_e<ω1、ステップ603:YES)という矛盾を検知した場合に、何れかの相に通電不良の発生を示す異常があると判定する(ステップ604)。
(もっと読む)
同期コンデンサの慣性を制御するためのシステム及び方法
【課題】発電システム内の電力擾乱事象に対応するよう同期コンデンサの慣性を制御するシステムを提供する。
【解決手段】システムは、モータ110と、双方向電源115と、少なくとも1つの制御装置120と、を含むことができる。モータ110は、電力擾乱事象中にコンデンサシャフト122の回転を変更して同期コンデンサ105の所望慣性を得るように構成することができる。双方向電源115をモータ110に結合することができる。少なくとも1つの制御装置120は、電力擾乱事象を識別し、所望の慣性を得るためにモータ110に供給し又はモータ110から受け取る電力量を特定して、特定された電力量に基づいて、電源115からモータ110へ、又はモータ110から電源115への電力供給を制御するよう構成することができる。
(もっと読む)
モータ制御装置及びこれを備えた機器
【課題】回路を複雑化させることなく、高負荷条件や負荷変動が大きくなる条件においても安定した動作が可能なモータ制御装置及びこれを備えた機器を提供することを目的とする。
【解決手段】交流電圧を直流電圧に変換する手段と、全波整流及び倍電圧整流の切り替えを判定する手段と、全波整流及び倍電圧整流を切り替える手段と、を有し、全波整流の場合にモータ電圧が所定値を上回ると弱め界磁制御を行い、前記弱め界磁制御の電流値に基づいて倍電圧整流に切り替え、動作が不安定となる領域の場合、変調率を用いて倍電圧整流切り替え判定を行うことを特徴とする。
(もっと読む)
同期電動機の制御装置
【課題】動作回転数範囲に共振周波数があっても安定して動作することが可能な同期電動機の制御装置を得る。
【解決手段】同期電動機10の巻線に流れる少なくとも2相の電流の検出値と周波数指令の積算によって得られる位相とから求めた周波数補正量を入力として、軸共振周波数とその前後の周波数成分のみを減衰させるノッチフィルタ12を介して、新たな周波数補正量を算出するようにした。
(もっと読む)
モータ駆動回路
【課題】低コストで、連続的に誘起電圧を検出し、それをもとにモータを高効率駆動する。
【解決手段】コイル電流検出部30は、コイルに流れる電流成分を検出する。スケーリング部38は、駆動信号をスケーリングする。誘起電圧成分抽出部42は、コイル電流検出部により検出されたコイル電流成分から、前記スケーリング部によりスケーリングされた駆動信号を除去して、誘起電圧成分を抽出する。位相差検出部74は、駆動信号の位相と、誘起電圧成分の位相との位相差を検出する。信号調整部14は、位相差検出部74により検出された位相差を目標位相差に近づけるよう駆動信号を調整する。
(もっと読む)
モータ駆動回路
【課題】低コストで、連続的に誘起電圧を検出し、それをもとにモータの脱調を回避する。
【解決手段】コイル電流検出部30は、コイルに流れる電流成分を検出する。スケーリング部38は、駆動信号をスケーリングする。誘起電圧成分抽出部42は、コイル電流検出部30により検出されたコイル電流成分から、スケーリング部38によりスケーリングされた駆動信号を除去して、誘起電圧成分を抽出する。位相差検出部74は、駆動信号の位相と、誘起電圧成分の位相との位相差を検出する。脱調予測判定部80は、位相差検出部74により検出された位相差の微分値と、脱調予測用の検出閾値とを比較し、脱調発生を予測する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行っているときに、モータの脱調を良好に検出する。
【解決手段】脱調判定部117は、操舵トルクセンサ21により検出した操舵トルクTrの大きさが予め設定された設定トルクより大きく、かつ、γ軸誘起電圧演算部116で算出したγ軸誘起電圧の大きさが予め設定された設定電圧より大きいときに、モータが脱調している判定する。モータの脱調が判定されたとき、加算量ガード処理部118は、電気角加算量Δθの上限値を設定する電気角加算量ガードΔθgを徐々に低減する。これにより、推定電気角θebの進む速度が遅くなり、モータが同期する。
(もっと読む)
モータ制御装置、およびモータ制御方法
【課題】正弦波駆動のモータの脱調を検出することを可能とするモータ制御装置を得ること。
【解決手段】モータ1のインダクタンス値および巻線抵抗値と相電圧とを用いて、逆起電力を無視した仮想電流を算出する仮想電流算出部10と、各相毎の仮想電流の正の領域および負の領域における特定の位相範囲として定められた交点検出区間において仮想電流と相電流との交点を検出し、交点検出区間において交点が検出されたか否かを示す交点検出結果を出力する交点検出部16と、交点検出結果に基づいて、モータの脱調を判定する脱調判定部17と、を備える。
(もっと読む)
ロータ位置検出装置
【課題】一部に磁力が異なる永久磁石をロータに配置した永久磁石モータに対し、低コストの磁気検出センサを用いてロータ位置を正確に検出する。
【解決手段】永久磁石モータ1が、ロータ3に、磁力が異なる2種類の磁石,ネオジム磁石9aとアルニコ磁石9bとを配置して構成される場合、速度・位置検出部55は、3つのホールセンサ68(A,B,C)を用いて永久磁石モータ1の回転速度を検出すると、その回転速度に基づいてロータ3の位置を検出する。そして、速度・位置補正部80は、ホールセンサ68により出力されるセンサ信号の変化状態からネオジム磁石9aとアルニコ磁石9bとの境界を検出すると、速度・位置検出部55により検出される回転速度又はロータ位置を補正する。
(もっと読む)
PMモータの位置・速度センサレス制御装置
【課題】電流検出器や電圧検出器の増設を不要にした簡易な構成で、しかも確実な脱調検出ができる。
【解決手段】モデル電圧演算部10は、PMモータ2の電圧方程式を基にしたPMモータモデルを使って、PMモータの速度指令の速度と電流指令のdq軸電流からdq軸モデル電圧vd*,vq*を求める。脱調判定部11は、モデル電圧とインバータの電圧指令vd,vqの比較によりPMモータの脱調の有無を判定する。
または、モデル電圧を演算する際にPMモータの電流指令に代えてdq軸電流検出値を用いる、さらにまたq軸成分のモデル電圧のみを使って脱調判定をする。
(もっと読む)
モータ駆動装置
【課題】回転位置センサを用いない安価なモータ駆動装置において、モータの起動時など比較的モータの回転数が低い場合でも正確に脱調判定を行う。
【解決手段】目標電流値、または、目標電流となるように駆動されたモータの駆動電流値とのいずれか一方と回転数指令値とを入力し、同回転数指令値に比例するモータの回転による誘起電圧と、固有のインピーダンス特性を持ったモータに駆動電流が流れた時に発生するインピーダンス特性電圧とから、モータの脱調の有無を判定するための脱調判定電圧閾値を出力する脱調判定電圧閾値算出手段を設け、電圧振幅指令値と脱調判定電圧閾値とを比較して、電圧振幅指令値が脱調判定電圧閾値よりも小さい場合、モータが脱調していると判定する。
(もっと読む)
昇降圧コンバータの制御装置およびこれを搭載するハイブリッド車並びに昇降圧コンバータの制御方法。
【課題】高電圧系の電圧が高い状態で電動機の回転数が回路の共振周波数に相当する回転数帯に至らないようにする。
【解決手段】モータMG2の回転数Nm2が昇降圧コンバータやコンデンサなどにより形成されるRLC回路の共振周波数帯に対応するモータMG2の回転数帯(共振回転数帯)より大きな回転数N1未満のときには電圧V1を制限電圧Vlimに設定し、モータMG2の回転数Nm2が回転数N1以上で回転数N2以下のときには電圧V1からインバータの入力最大電圧Vsetまでリニアに増大した電圧を制限電圧Vlimに設定し、モータMG2の回転数Nm2が回転数N2以上のときにはインバータの入力最大電圧Vsetを制限電圧Vlimに設定し、設定した制限電圧Vlimにより要求電圧Vhreqを制限して得られる目標電圧Vh*となるよう高電圧系の電圧VHを制御する。
(もっと読む)
電動機制御装置および冷却装置
【課題】回転位置を検出するセンサを有しない交流電動機をより確実に起動して制御できるようにする。
【解決手段】電動モータの制御を停止した後に電動モータの要求デューティ比dB*が値0より大きくなったときには(S110,S160)、電動モータの制御を停止してからの経過時間tが所定時間tref以上になったときに電動モータを起動して制御する(S160〜S200)。これにより、電動モータをより確実に起動して制御することができる。
(もっと読む)
モータ制御装置
【課題】モータ電気角及びモータ電流のサンプリングが不等間隔になってもトルク変動をなくすことができるモータ制御装置を提供する。
【解決手段】キャリア周期可変部6は、PWM制御部18が使用するキャリア周期を変更することにより、インバータ2が発生する高調波のスペクトルを拡散させる。電気角補償部15は、キャリア周期可変部6が変更したキャリア周期に応じて、角度センサ5が検出したモータ3の電気角を補償した電気角を2相/3相変換部14へ出力する。PWM制御部18は、2相/3相変換部14が出力する3相電圧目標値となるように、キャリア周期可変部6が変化させたキャリア周期でインバータ2を制御する。
(もっと読む)
1 - 20 / 62
[ Back to top ]