
Fターム[5H540AA08]の内容
Fターム[5H540AA08]に分類される特許
1 - 16 / 16
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、入力信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、入力信号のうち、共振周波数より低い所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、一方のデジタルフィルタには、目標電流信号が入力され、他方のデジタルフィルタには、一方のデジタルフィルタの出力信号が入力される。
(もっと読む)
モータ駆動回路

【課題】アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、目標電流信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、デジタルノッチフィルタの出力信号のうち、所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、デジタルローパスフィルタのサンプリング周波数は、デジタルノッチフィルタのサンプリング周波数より高い。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
リニア振動モータの駆動制御方法
【課題】低コスト、且つ、効率よく巻線へ電流を流す駆動制御を行う。
【解決手段】振幅検出部7が、非通電期間中に起電圧のサンプリングを行い、その中での最大点により振幅を算出する。これにより、サンプリング時間が多少ずれても十分に振幅を検出でき、次の巻線1への通電タイミングまでの時間に余裕がある。このため効率の良いタイミングで巻線へ通電することができ、モータ駆動の効率化、省電力化となる。
(もっと読む)
VCMドライバとPWMアンプ
【課題】低消費電力と高精度化を実現したVCMドライバ及びデットタイム歪みを補償したPWMアンプを提供する。
【解決手段】位相補償器と、位相補出力を受けて所定ビットの制御コードに変換するΔΣ変調器と、制御コードを受けてPWM信号を形成するPWM変調器と、PWM信号を受けてボイスコイルを駆動する出力回路とで往路経路を構成する。ボイスコイルの電流をセンスするセンスアンプと、センス出力を受けるADCと、ADC出力を受けるロウパスフィルタと、ロウパスフィルタ出力を受けるデシメーションフィルタとで帰還経路を構成する。デシメーションフィルタの出力を位相補償器の入力側に帰還させて一次特性のループゲインを持つ主帰還ループを構成する。デシメーションフィルタの出力を位相補償器の出力側に帰還させて、位相補償器の出力側からみて目標帯域周波数まで平坦なループゲインとする副帰還ループを構成する。
(もっと読む)
清掃装置
【課題】 歯牙を最適な運動にて清掃、マッサージする機具。
【解決手段】 手指により把持する把持部に第一磁場発生手段を設け、その磁場発生手段の内部にさらに第2磁場発生手段を設け、その第二磁場発生手段の端または内部に切削、研磨、清掃、診断用などの先端子を設けることにより的確な切削、研磨、清掃が可能となる。またそれらの磁場発生手段の時間、空間変動を検出すればその位置がわかり目視不可能な位置の切削、研磨、清掃が可能となる。さらにまた、磁場や振動を組織に伝達すれば、血行循環改善となる。
(もっと読む)
磁気ディスク制御装置
【課題】PWM・リニア併用方式を採用しつつシーク動作の短縮化を図った磁気ディスク制御装置を提供する。
【解決手段】VCMドライバは、モード制御信号に対応して上記磁気ヘッドが隣接するトラックを順次に走査するトラッキング動作のときにリニア動作を行い、上記磁気ヘッドがトラックを跨いで移動するシーク動作のときにPWM動作を行う出力段を有する。電圧生成部は、同じ駆動電圧に対応した上記PWM動作とリニア動作との間のオフセットに相当するオフセット補償電圧を形成する。上記VCMドライバは、上記リニア動作のときには駆動電圧を上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。上記VCMドライバは、上記PWM動作のときには駆動電圧に上記オフセット補償電圧を加えて上記出力段の入力端子に伝えて上記ボイスコイルモータを駆動する。
(もっと読む)
完全な差動ボイスコイルモータ制御のための、オンチップ補償
差動ボイスコイルモータ制御機能を備えるディスクドライブコントローラが開示される。差動ボイスコイルモータ制御機能は、内部制御ループのための、直列接続された1以上のMOSトランジスタから成る抵抗器を含む、オンチップ補償ネットワークを備える。補償ネットワークにおけるMOSトランジスタのゲートは、調整電流に基づいてバイアス電圧で駆動される。調整電流は、集積回路における過程及び温度変化、例えばオンチップコンデンサ内の変化などに伴って変化するよう、得られる。オンチップ補償ネットワークは、内部制御ループを適切に補償するよう、ディスクドライブ内のボイスコイルモータの駆動において所望の周波数応答を与えるよう、十分正確に調整可能である。 (もっと読む)
アクチュエータ駆動装置
【課題】 Hブリッジ回路を用いたアクチュエータ駆動装置における省電力化。
【解決手段】 Hブリッジ回路に供給される2種類のパルス信号が以下の条件を満たす。
x≧Xmin時
パルス信号Aのパルス幅=T(x/Xmax)
パルス信号Bはローレベル、
x≦(−Xmin)時
パルス信号Aはローレベル、
パルス信号Bのパルス幅=T(|x|/Xmax)
0<x<Xmin時
パルス信号Aのパルス幅=T(x/Xmax)+Tmin
パルス信号Bのパルス幅=Tmin
0>x>(−Xmin)時
パルス信号Aのパルス幅=Tmin
パルス信号Bのパルス幅=T(|x|/Xmax)+Tmin
x=0時
パルス信号Aのパルス幅=Tmin
パルス信号Bのパルス幅=Tmin
(x:制御信号、Tmin:アクチュエータを駆動可能な最小パルス幅、Xmin:そのときの制御信号であり、Xmin=Xmax(Tmin/T))
(もっと読む)
ボイスコイルモータ駆動回路および磁気ディスク記憶装置
【課題】 トラッキング時における磁気ヘッドの位置決め制御の高精度化とシーク時間の短縮によるアクセスの高速化を同時に達成可能にするボイスコイルモータの駆動制御技術を提供する。
【解決手段】 磁気ヘッドを移動させるボイスコイルモータ(108)と、該ボイスコイルモータの駆動電流をPWM方式で駆動しコイルの電流を検出してフィードバック制御することにより上記磁気ヘッドの位置決め制御を行なうボイスコイルモータ駆動回路(110)とを有する磁気ディスク記憶装置において、上記ボイスコイルモータのコイル電流を検出するアンプ(113)の出力をサンプル・ホールドせずに誤差アンプ(114)に供給する。また、PWM駆動時にボイスコイルモータのコイルの端子に印加される駆動電圧のスルーレートを制御する回路(PWMコンパレータ)を設けるようにした。
(もっと読む)
リニアモータ、画像読取装置及び画像形成装置
【課題】磁束密度を検出するセンサを用いることなく可動子を移動制御することが可能なリニアモータ、リニアモータを搬送装置として備えた画像読取装置及び画像形成装置を提供する。
【解決手段】制御部17はリニアモータ1の制御を行う。制御部17には、配列された複数の磁石6の磁極間情報や磁束密度や可動子7が原点に移動する初期動作時に電磁コイル8に供給される電流値の基準値となる基準電流値等が記憶されている記憶部18と、検出したリニアモータ16の速度と記憶部18による目標速度との差を算出する差分出力部19と、初期動作時にリニアモータ16に供給されている電流値と基準電流値との比較等をする演算部20と、駆動制御信号に基づきリニアモータ16に駆動電力を供給する電力制御部21とが設けられている。電力制御部21は、余弦関数に基づいて電磁コイル8のコイルに駆動電力を供給し、リニアモータ16を駆動制御するようになっている。
(もっと読む)
サーボ制御方法及びそれに適した装置
【課題】サーボ制御方法及びそれに適した装置を提供する。
【解決手段】プラントの所望のレファレンス軌跡を表す多項式及びその導関数を準備するステップと、プラント入力に対するプラント出力をサンプリングするステップと、サンプル間の相対時間を参照してレファレンス信号及びその導関数信号を発生させるステップと、発生したレファレンス信号及びその導関数信号、遅延されたプラント入力、そして遅延されたプラント出力を使用してサンプリング時点でのプラント入力を決定するステップと、を含むことを特徴とするサーボ制御方法である。これにより、レファレンス信号以外にもその導関数信号を利用して、プラントが高い精度でレファレンス軌跡を追従するよう制御できる。
(もっと読む)
リニア駆動ドライバー回路
【課題】本発明のリニア駆動ドライバー回路は、発熱を抑えて、入力電圧VINの急激な変化にBTLドライバー部の出力電圧差が対応できるように、降圧型DC−DCコンバータ部の出力信号VCの応答性能を向上させることを目的とする。
【解決手段】本発明のリニア駆動ドライバー回路は、リニア駆動ドライバー部からの制御信号を微分処理する微分回路と、及び微分回路からの微分信号の電位が所定値を超えたとき、異常動作時であるとして異常動作駆動信号を生成する波形整形回路とを有し、波形整形回路の異常動作駆動信号により降圧型DC−DCコンバータ部のスイッチング・トランジスタを駆動制御するよう構成されている。
(もっと読む)
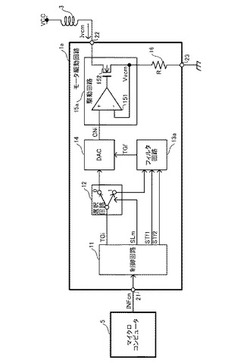
コイルを有する駆動源の駆動制御回路
【課題】ボイスコイルモータのようなコイルを有する駆動源を高精度に駆動制御することができる駆動制御用半導体集積回路を提供する。
【解決手段】コイル駆動回路121,122と、コイルに流れる電流を検出する電流検出回路123と、電流指令値をアナログ信号に変換するAD変換回路150と、電流検出回路123の出力とAD変換回路150の出力に基づいて駆動回路121,122を駆動制御するための信号を生成する電圧入力−電流出力型の増幅回路125とを備えた駆動制御回路120において、AD変換回路150に所定の電流指令値を与えて上記コイルの端子に所定の電圧を印加しかつコイルに電流が流れないようにした状態で、電流検出回路123の出力とAD変換回路150の出力に基づいて、電流検出回路123の出力のずれを判定し、電流検出回路123の電流値もしくは抵抗値を調整して制御系のオフセットをキャンセルする。
(もっと読む)
パルス幅変調されるモーター・コントローラの利得エラー相殺のための電力供給変動の抑止
ディスクドライブ・システムのボイスコイルモーター(22)の位置決めドライバ(32)が開示される。パルス幅変調される前段ドライバ(46)が、ボイスコイルモーター(22)を駆動するため「H」ブリッジに配置されるパワー・トランジスタ(50PH、50NH、50PL、50NL)に結合され、電力供給電圧(VM)でバイアスがかけられる。パルス幅変調される前段ドライバ(46)は、エラー増幅器(36)からのエラー信号とランプ・クロック生成器(48)で生成されるランプ・クロック信号(RMP)との比較に従ってパワー・トランジスタ(50PH、50NH、50PL、50NL)を駆動する。ランプ・クロック生成器(48)は、電力供給電圧(VM)の変動に応答してランプ・クロック信号(RMP)の高及び低限界を変調する制御回路を含む。高及び低限界のこの変調が、電力供給電圧(VM)の変動に起因するパワー・トランジスタ(50)の利得の変動を補償する。制御回路は、例えば、一定の周波数を維持するため、電力供給電圧(VM)の変動に従ってランプ・クロック信号(RMP)の勾配も変調し得る。  (もっと読む)
(もっと読む)
デュアルモード・ボイスコイルモーター・コントローラにおけるD級からリニア・オペレーションへの効率的な遷移
ディスクドライブ・システムのボイスコイルモーター(22)のためのデュアルモード位置決めドライバが開示される。リニア前段ドライバ及びパルス幅変調された前段ドライバ(46)は、両方とも、ボイスコイルモーター(22)を駆動するため「H」ブリッジに配置されるパワー・トランジスタ(50PH、50NH、50PL、50NL)に結合される。このため、位置決めドライバは、リニア・モード又はパルス幅変調されたD級モードのいずれかでパワー・トランジスタ(50)を駆動するように作動する。遷移期間において、パルス幅変調されたモードからリニア・モードにスイッチングする間、コンパレータ(56H、56L)は、「H」ブリッジの位相電圧を参照電圧と比較する。コンパレータ(56H、56L)の出力は、位相電圧がそれらのリニア・バイアス点に向かって事前調整されるように、パワー・トランジスタ(50)を駆動するようにPWM出力増幅器(54H、54L)に供給される。その結果、電流ボイスコイルモーター(22)を介する駆動電流の中断は最小限となる。 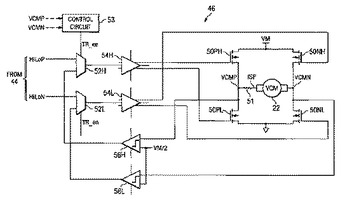 (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]