
Fターム[5H540BA06]の内容
Fターム[5H540BA06]に分類される特許
1 - 20 / 55
線形運動デバイスの制御装置、線形運動デバイスの制御方法
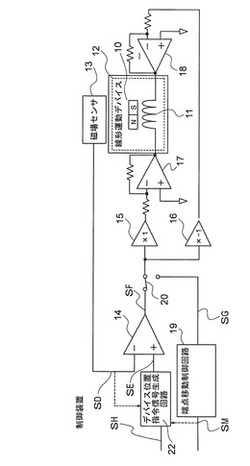
【課題】 線形運動デバイスが端点間の移動の際に発生する衝突音を抑制する。
【解決手段】磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12が目標位置にある場合に出力されるデバイス位置指令信号SEを出力するデバイス位置指令信号生成回路22と出力信号SDとデバイス位置指令信号SEとの偏差を示す操作量信号SFを出力する差動増幅器14、線形運動デバイス12に、XBOTに向かう力とXTOPに向かう力とを交互に加えながら、XBOT、XTOP間を移動させるドライバ制御信号SGを出力する端点移動制御回路19、ドライバ制御信号SG、操作量信号SFのいずれか一方を選択するスイッチ20、ドライバ制御信号SGまたは操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって線形運動デバイスを制御する。
(もっと読む)
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器

【課題】スプリングリターン機構付きVCMの振動を抑制する。
【解決手段】制御部30は、ボイスコイルモータ110の目標ストローク量を指示する指令値を受け、制御信号V2を生成する。制御信号S2は、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータ110の共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する。駆動電流生成部10は、ボイスコイルモータ110のコイルに、制御信号S2に応じた駆動電流Idrvを供給する。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、入力信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、入力信号のうち、共振周波数より低い所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、一方のデジタルフィルタには、目標電流信号が入力され、他方のデジタルフィルタには、一方のデジタルフィルタの出力信号が入力される。
(もっと読む)
モータ駆動回路
【課題】アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、目標電流信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、デジタルノッチフィルタの出力信号のうち、所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、デジタルローパスフィルタのサンプリング周波数は、デジタルノッチフィルタのサンプリング周波数より高い。
(もっと読む)
ボイスコイルモータの制御方法及びレンズフォーカスシステム
【課題】ボイスコイルモータの制御方法及びレンズフォーカスシステムの提供。
【解決手段】本発明によると、ボイスコイルモータの制御方法は、該ボイスコイルモータのコイル電流の総変動量を分割して多次変動とし、毎次変動する時間を該ボイスコイルモータのスプリング共振周期の2分の1とし、これにより大幅にスプリングの共振程度を低減し、これによりボイスコイルモータをスピーディーに安定させ、ひいてはフォーカス時間を短縮する。
(もっと読む)
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器
【課題】スプリングリターン機構付きVCMの振動を抑制可能な制御技術を提供する。
【解決手段】駆動回路100は、スプリングリターン機構付きボイスコイルモータ110を駆動する。駆動電流生成部10は、ボイスコイルモータ110のコイルL1に、アナログ制御信号V2に応じた駆動電流Idrvを供給する。波形メモリ40は、ボイスコイルモータ110の駆動電流Idrvの時間波形を記述するデジタルの波形データWDを格納する。波形データWDは、その周波数成分から所定の周波数成分が取り除かれている。制御部30は、ボイスコイルモータ110の共振周波数f0に応じたレートで、波形メモリ40から波形データWDを読み出し、デジタルコードS2として出力する。D/Aコンバータ16は、デジタルコードS2をアナログ制御信号V2に変換し、駆動電流生成部10へと出力する。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動が収束するまでの収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、前記アクチュエータの共振周波数を含む周波数帯域を減衰させるデジタルフィルタと、前記デジタルフィルタの出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、前記電流制御信号に応じて前記ボイスコイルモータに前記駆動電流を供給する駆動回路と、を有する。
(もっと読む)
駆動制御回路およびフォーカス制御回路
【課題】PWM駆動電流に起因するノイズを低減する。
【解決手段】イコライザ30は、対象物の状態に係る目標値とその実測値との差分をもとに、対象物の状態を目標値に合わせるための制御信号を生成する。PWM変調部40は、イコライザ30により生成される制御信号に応じたPWM信号を生成する。Hブリッジ駆動部50は、PWM変調部40により生成されたPWM信号に応じて、対象物の状態を変化させる駆動素子12を駆動するための駆動電流を生成する。スルーレート制御部60は、制御信号に応じて、Hブリッジ駆動部50の電流駆動能力を変化させる。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動開始時における振動の立ち上がり時間を短縮する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを交互に流すための駆動信号であって、正電流通電期間および負電流通電期間のそれぞれの前後に非通電期間が設定される駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、リニア振動モータ200の駆動開始後、駆動信号の少なくとも最初の通電期間の前に設定されるべき非通電期間幅を、リニア振動モータ200の定常動作時において各通電期間の前に設定されるべき非通電期間幅より短く設定する。
(もっと読む)
モータの駆動回路およびそれを用いた位置制御システムならびに電子機器
【課題】消費電力を低減可能したボイスコイルモータの駆動回路を提供する。
【解決手段】駆動回路4は、入力電圧Vddを所定の電圧Voutに変換する昇圧型、降圧型、もしくは昇降圧型のDC/DCコンバータを備える。DC/DCコンバータのインダクタンス素子として、VCM2のボイスコイルL1を用いる。スイッチングトランジスタSW1は、電源電圧Vddが印加される第1固定電圧端子P1とボイスコイルL1の第1端子T1の間に設けられる。同期整流トランジスタSW2はボイスコイルL1の第1端子T1と接地電圧VGNDが印加される第2固定電圧端子P2の間に設けられる。キャパシタC1は、ボイスコイルL1の第2端子T2と第2固定電圧端子P2の間に設けられる。制御回路10はスイッチングトランジスタSW1、同期整流トランジスタSW2のオン、オフを制御する。
(もっと読む)
モータ制御装置およびそれを用いた電子機器
【課題】ボイスコイルモータの駆動力を低消費電力で線形に制御することが可能なモータ制御装置を提供する。
【解決手段】このデジタルカメラでは、ボイスコイルモータ6の駆動力をゼロにする場合でも、ボイスコイル13の一方端子13aの電圧VAを一定時間(−80〜40)だけ「H」レベルにするとともに、ボイスコイル13の他方端子13bの電圧VBを一定時間(0〜120)だけ「H」レベルにする。したがって、ボイスコイル13に印加する電圧VA,VBのパルス幅を広くすることができ、電圧VA,VBの立ち上がりおよび立ち下がりの鈍りの影響を軽減できる。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
振動素子
【課題】装置の構成の複雑化を抑制するとともに、可動部の振動状態の検出期間を拡大することが可能な振動素子を提供する。
【解決手段】この電磁駆動式ミラー(振動素子)100は、所定の共振周波数およびその近傍で振動する可動部11と、パルス電流Ipを周期的に供給することにより可動部11を振動させるパルス電流供給部32と、可動部11の振動状態を検出する逆起電力検出部33とを備え、パルス電流供給部32は、少なくとも起動時には、可動部11の共振周波数と略同じ第1周波数f1でパルス電流Ipを供給するとともに、可動部11の振動状態の検出時には、第1周波数f1よりも小さい第2周波数f2でパルス電流Ipを周期的に供給するように構成されている。
(もっと読む)
リニア振動モータの駆動制御方法
【課題】低コスト、且つ、効率よく巻線へ電流を流す駆動制御を行う。
【解決手段】振幅検出部7が、非通電期間中に起電圧のサンプリングを行い、その中での最大点により振幅を算出する。これにより、サンプリング時間が多少ずれても十分に振幅を検出でき、次の巻線1への通電タイミングまでの時間に余裕がある。このため効率の良いタイミングで巻線へ通電することができ、モータ駆動の効率化、省電力化となる。
(もっと読む)
カメラシステム、ボイスコイルモータの駆動装置、およびボイスコイルモータの駆動方法
【課題】ボイスコイルモータなどのアクチュエータの共振振動を、簡単な構成でしかも短時間に低減することができ、これによりこのようなアクチュエータを用いたAF制御の高速化およびその構成の小型化を実現することができるカメラシステムを得る。
【構成】カメラシステムにおいて、画像信号からレンズの目標位置を算出するレンズ位置算出部6と、レンズ目標位置を示す信号に対してその変化が緩和されるようフィルタ処理を施すフィルタ回路7と、そのフィルタ出力Asに基づいてレンズ1を駆動するレンズ駆動部120とを備え、フィルタ回路7は、目標位置信号Lpから得られるレンズ移動量に応じて、単調増加した後に単調減少する信号波形をクロックベースで生成する波形生成部72と、該波形生成部72で生成された信号波形を、その振幅レベルがクロックベースで該出発位置に加算されるよう積分する積分処理部73とを有する。
(もっと読む)
ステージ装置及びそれを有する露光装置
【課題】迅速、低衝撃かつ低回転力で停止可能なステージ装置及びそれを有する露光装置を提供する。
【解決手段】リニアモータ4、5によって可動部2を移動し、リニアモータ4、5が備える少なくとも一つのコイル4C1U〜Wを含む閉回路を構成してブレーキを働かせることによって可動部2を減速させるステージ装置は、閉回路内においてコイル4C1U〜Wに接続可能で、抵抗値の異なる複数の抵抗R1〜R3と、可動部2の移動速度を検出する速度検出部9と、速度検出部9の検出結果に基づいてコイル4C1U〜Wと複数の抵抗R1〜R3とを接続又は切断する切換スイッチ27と、を有する。
(もっと読む)
リニアモータ用通電制御回路
【課題】 コストの増大と大型化を伴わずに、輻射ノイズと消費電力を低減することができるリニアモータ用通電制御回路を提供する。
【解決手段】 リニアモータ用通電制御回路は、MOSFET又はIBGTからなる2つのスイッチ素子S1、S2を交互にオン・オフ制御することによりPWMパルスを発生するスイッチ回路1と負荷6が接続される出力端子4a、4bとの間に、磁気的に結合されたインダクタンスL1、L2とコンデンサC2を含む平滑回路5を設けると共に、スイッチ素子S1、S2と並列に回生ダイオードD3、D4を接続することにより構成される。
(もっと読む)
位置決め装置、露光装置及びデバイス製造方法
【課題】 テーブルを駆動するアクチュエータへの電流供給路の断線の検知を、簡単な構成でかつ確実に行うことができる位置決め装置を提供すること。
【解決手段】 ステージ1を駆動するアクチュエータ2と、アクチュエータ2に電流を供給するドライバ3との間に電流供給路42が接続され、この電流供給路42に途中には電流検出器8が設けられる。電流供給路42は複数の経路を有し、電流検出器8は、上記複数の経路のうちの少なくとも1つの経路の電流に基づいて電流供給路42の断線を検知する。
(もっと読む)
VCMドライバとPWMアンプ
【課題】低消費電力と高精度化を実現したVCMドライバ及びデットタイム歪みを補償したPWMアンプを提供する。
【解決手段】位相補償器と、位相補出力を受けて所定ビットの制御コードに変換するΔΣ変調器と、制御コードを受けてPWM信号を形成するPWM変調器と、PWM信号を受けてボイスコイルを駆動する出力回路とで往路経路を構成する。ボイスコイルの電流をセンスするセンスアンプと、センス出力を受けるADCと、ADC出力を受けるロウパスフィルタと、ロウパスフィルタ出力を受けるデシメーションフィルタとで帰還経路を構成する。デシメーションフィルタの出力を位相補償器の入力側に帰還させて一次特性のループゲインを持つ主帰還ループを構成する。デシメーションフィルタの出力を位相補償器の出力側に帰還させて、位相補償器の出力側からみて目標帯域周波数まで平坦なループゲインとする副帰還ループを構成する。
(もっと読む)
電流駆動型アクチュエータ駆動制御装置
【課題】電流駆動型アクチュエータ駆動制御装置において、コストを抑制して速度フィードバックを可能とすることである。
【解決手段】気体圧サーボ弁の位置決め制御システム10において、スプール24の位置を変位センサ42で検出し、位置指令52と比較してその偏差に対し、ゲインG1を乗じて速度指令とし、速度指令と制御対象の速度と比較し、その偏差に対しゲインG2を乗じて駆動指令とし、これを電流ブースタ62に出力する。電流ブースタ62は、駆動指令を駆動電流に変換してフォースモータ40の可動線輪36に供給し、スプール24を移動させる。電流ブースタ62の出力は速度演算器66によって積分演算されて速度情報に変換され、速度フィードバックループ67によって減算器58に戻される。振動除去装置に置いても同様に速度演算器による速度フィードバックを行うことができる。
(もっと読む)
1 - 20 / 55
[ Back to top ]