
Fターム[5H540BB08]の内容
Fターム[5H540BB08]に分類される特許
1 - 20 / 46
リニアモーター
【課題】リニアモーターの制御性を向上させる技術を提供する。
【解決手段】リニアモーター10は、スライダー20と、ステーター30とを備える。スライダー20は、複数の永久磁石21が、同じ極同士が互いに対向するように直列に配列された磁石列21lを有し、電磁力によって磁石列21lの配列方向に沿って移動する。ステーター30は、スライダー20の移動方向に沿って配列された2相の電磁コイル31a,31bを備える。また、リニアモーター10は、スライダー20の移動を制御するために、磁石列21lの移動に伴う磁束の変化を検出する位置検出センサー40を備える。位置検出センサー40は、電磁コイル31の各相に対応して設けられ、電磁コイル31の外周に配列され、永久磁石21同士の境界における磁束を検出し、各相の電磁コイル31に生じる逆起電圧と等しい位相の波形信号を出力する。
(もっと読む)
リニアモータの制御装置、及びリニアモータ装置

【課題】リニアスケールを用いずにリニアモータの位置決め精度を改善することができるリニアモータの制御装置を提供する。
【解決手段】リニアモータの制御装置は、リニアモータの電機子が有している磁気センサであってリニアモータの駆動用磁石より生じる磁界の方向に応じた信号を出力する磁気センサから出力される信号の変化に基づいてリニアモータの可動子の位置を検出する位置検出部と、位置検出部が検出した可動子の位置と外部より入力される位置指令値とに基づいて速度指令値を算出する位置制御部と、リニアモータに備えられている複数のコイルに流れる電流値から可動子が移動する速度を推定する推定部と、位置制御部が算出する速度指令値と推定部により推定する可動子の推定移動速度とに基づいて電流指令値を算出する速度制御部と、速度制御部が算出した電流指令値に応じて複数のコイルに電力を供給する電力変換器とを備えている。
(もっと読む)
検知方法、露光方法、及びデバイス製造方法
【課題】固定子と可動子との間の距離の変化を検知可能な検知方法、この検知方法による検知結果に基づいて基板にパターンを転写露光する露光方法、及びこの露光方法を利用してデバイスを製造するデバイス製造方法を提供すること。
【解決手段】検知方法は、第1方向に沿って配列された複数の固定子に対して可動子を第1方向に沿って第1の速度で等速移動させ、等速移動させたときの可動子の第1方向における第1の推力の大きさを検出し、複数の固定子に対して可動子を第1方向に沿って第1の速度とは異なる第2の速度で等速移動させ、等速移動させたときの可動子の第1方向における第2の推力の大きさを検出し、第1及び第2の速度と、第1及び第2の推力の大きさとを用いて、固定子と可動子との間に作用するコギング力の大きさを算出し、算出ステップによって算出されたコギング力の大きさに基づいて、固定子と可動子との間の距離の変化を検知する。
(もっと読む)
リニアアクチュエータ駆動装置
【課題】可動子の自重により生じるオフセットズレを補正するリニアアクチュエータ駆動装置を提供する。
【解決手段】駆動装置1は、駆動指令Irefに応じて可動子23を往復させる電磁駆動部10と、通電がなされていない時、可動子23が自重により所定の移動可能範囲Dの中心Dcからズレて可動範囲W1が移動可能範囲Dよりも狭くなる場合に、可動子23の往復動中心Wcと移動可能範囲Dの中心Dcとの偏差を無くする方向へ可動子23の往復動中心Wcを移動させるオフセット通電をなすように駆動指令Irefを補正するオフセット補正部11とを有している。オフセット補正部11は、駆動指令Irefに応じた可動子23の振幅値Lpに対応する振幅情報を取得し、振幅情報に対応する振幅値Lpに対して可動振幅(W1/2)が可動域不足状態となる場合に駆動指令Irefの補正する一方、可動域不足状態でない場合に駆動指令Irefの補正を解除する。
(もっと読む)
リニアモータの制御装置
【課題】磁気センサが出力する信号に周期的な変動成分が含まれる場合においても、リニアモータを安定して制御する。
【解決手段】リニアモータを制御する制御装置は、外部より入力された単位時間当たりに可動子を移動させる距離を示す位置指令に基づいて、可動子を等速にて移動させる等速制御と、可動子の速度を加速させる加速度制御とのいずれか一方を選択し、等速制御を選択した場合、可動子の速度に対する平均である平均速度と、速度指令とに基づいて、リニアモータに印加する電流値を示す電流指令を算出し、加速度制御を選択した場合、可動子の速度と、速度指令とに基づいて、電流指令を算出し、算出した電流指令に基づいてリニアモータに電流を印加する。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時における振動停止時間を短縮する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号を生成する。駆動部20は、逆位相の駆動信号に応じた逆位相の駆動電流をコイルL1に供給することにより、リニア振動モータ200の停止を早める。
(もっと読む)
リニアモータ
【課題】リニアモータを小型化することにある。
【解決手段】外周面にコイル組立体20が取り付けられるロッド11と、ロッド11を囲むように磁石組立体14が装着されるモータケース12とを有するリニアモータであって、円筒形状の2つの永久磁石15a,15bを相互に同極性の磁石端面を隣接させて磁石組立体14を形成し、それぞれ永久磁石15a,15bの半分の軸方向長さを有する8つのコイル21を相互にコイル端面を隣接させてコイル組立体20を形成する。コイル組立体20のうち1組以上のコイル21の隣接されたコイル端面の極性を同極性励磁して径方向集中磁束を生じることにより磁石組立体14の磁束を引き付け、コイル組立体20の軸方向先端側から軸方向基端側に向けて同極性励磁を移動励磁する。
(もっと読む)
リニアエンコーダ
【課題】 電源投入時の立ち上がり時間を短縮させることが可能なリニアエンコーダを提供すること。
【解決手段】 リニアスケールには、位置情報としてインクリメント位置を示す複数の情報を所定ピッチで記録したインクリメント指標部と、インクリメント位置とは別の基準点位置を示す複数の情報を所定ピッチで記録した基準点位置指標部と、インクリメント位置及び基準点位置とは別の位置情報を持つアブソ信号を記録したアブソ指標部とが設けられ、隣接する任意の基準点位置間に含まれるアブソ信号の組み合わせが他の基準点位置間に含まれるアブソ信号の組み合わせの何れとも異なるように設定され、信号処理部は上記検出ヘッドの検出素子からの検出信号に基づいてアブソ信号の組み合わせを読み取り、予め記憶していたテーブルと比較して可動部のリニアスケール上の絶対位置を求めるように構成されているもの。
(もっと読む)
同期モータを作動させる方法および増幅器
本発明は、同期モータ(100、300)を作動させる方法に関する。本方法では、ステップa)において、第1のモータ部材(110、310)によって磁場(111、311)を所定の向きに生成して、第1のモータ部材と第2のモータ部材(110、120、310、320)との間で所定値(151)に限定された相対運動を発生させ、ステップb)において、この第1のモータ部材と第2のモータ部材(110、120、310、320)との間の限定された相対運動の運動方向を決定する。第1のモータ部材と第2のモータ部材(110、120、310、320)との間の限定された相対運動の運動方向に変化が発生するまで、ステップa)およびステップb)を繰り返し、ステップa)が行われるごとに、先に生成された上記磁場(111、311)に対して変化した向きを有する磁場(111、311)を第1のモータ部材(110、310)によって生成し、ここで、磁場(111、311)の向きを、それぞれ所定の配向セクション(170)によって、および、上記の決定された運動方向に応じて変化させる。本発明は、さらに、同期モータ(100、300)を作動させるための増幅器(200)、および、増幅器(200)と同期モータ(100、300)とを備えたシステムにも関する。 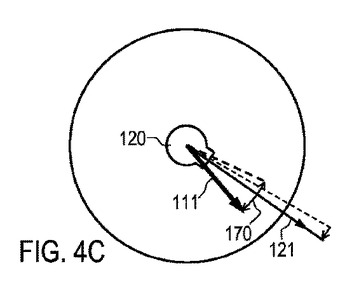 (もっと読む)
(もっと読む)
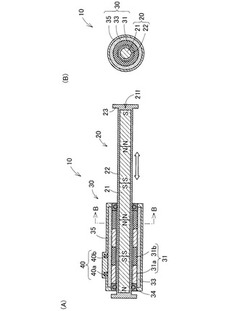
リニアモータ
【課題】リニアモータにおいて、リニアスケールを使用することなく安価で、しかも数μm程度の精度での位置検出の実現を図る。
【解決手段】リニアモータ1は、複数の永久磁石22を隣り合う極性が異なるように、所定の隙間Lを有して所定ピッチPで列設した固定子2と、複数のリニアコイル32を有する、固定子2上を移動する可動子3と、固定子3上における可動子3の位置を検出する位置検出手段4とを備える。可動子3は、永久磁石22の磁界を検知する基準用磁気センサ41と、移動方向に所定の間隔Sで配置され、永久磁石22の磁界を検知する複数の測定用磁気センサ42を備える。移動時に、位置検出手段4は、基準用磁気センサ41からの基準信号RSに応じて隙間Lの上方を通過する各測定用磁気センサ42からの各測定信号MSを逐次取得する。
(もっと読む)
リニアモータシステム、リニアモータアクチュエータ及び制御装置
【課題】リニアスケールのコストを減らしつつ、高速な移動を可能とし、且つ、停止精度を高くする。
【解決手段】位置センサはリニアスケールの目盛りを読み取り第1の位置情報を生成し、磁気センサは可動子又は固定子の一方から発生する磁界を検出し、90°の位相差を持つ正弦波状信号及び余弦波状信号を出力し、位置検出手段は正弦波状信号及び余弦波状信号に基づいて第2の位置情報を生成し、リニアスケール又は位置センサの一方は可動子とともに移動し、リニアスケール又は位置センサの他方は可動子が移動可能な範囲のうちの一部の範囲のみで位置センサがリニアスケールの目盛りを読み取ることができるように配設され、制御装置は、可動子の位置が一部の範囲から外れているときには第2の位置情報を、可動子の位置が一部の範囲に入っているときに当該範囲内で可動子を停止させる場合には第1の位置情報を、コイルに流れる電流の制御に用いる。
(もっと読む)
磁気浮上制御装置
【課題】 任意の位置でゼロパワー制御が可能な磁気浮上制御装置を提供する。
【解決手段】 可動部,浮上アクチュエータ,位置センサ,およびコントローラとを備えた磁気浮上制御装置において、前記浮上アクチュエータは永久磁石23による吸引力または反発力を可変とした永久磁石磁力可変モータであり、該永久磁石磁力可変モータは永久磁石23による吸引力または反発力を変化させるためのアクチュエータである磁力操作モータ15を備え、コントローラ100は磁力操作モータ15の可動子位置を制御する磁力操作モータ制御器195を備え、磁力操作モータ15の可動子位置を操作することによって永久磁石磁力可変モータの発生する推力を操作する。
(もっと読む)
振動素子
【課題】装置の構成の複雑化を抑制するとともに、可動部の振動状態の検出期間を拡大することが可能な振動素子を提供する。
【解決手段】この電磁駆動式ミラー(振動素子)100は、所定の共振周波数およびその近傍で振動する可動部11と、パルス電流Ipを周期的に供給することにより可動部11を振動させるパルス電流供給部32と、可動部11の振動状態を検出する逆起電力検出部33とを備え、パルス電流供給部32は、少なくとも起動時には、可動部11の共振周波数と略同じ第1周波数f1でパルス電流Ipを供給するとともに、可動部11の振動状態の検出時には、第1周波数f1よりも小さい第2周波数f2でパルス電流Ipを周期的に供給するように構成されている。
(もっと読む)
リニア振動モータの駆動制御方法
【課題】低コスト、且つ、効率よく巻線へ電流を流す駆動制御を行う。
【解決手段】振幅検出部7が、非通電期間中に起電圧のサンプリングを行い、その中での最大点により振幅を算出する。これにより、サンプリング時間が多少ずれても十分に振幅を検出でき、次の巻線1への通電タイミングまでの時間に余裕がある。このため効率の良いタイミングで巻線へ通電することができ、モータ駆動の効率化、省電力化となる。
(もっと読む)
ブラシレス電気機械
【課題】制御回路の構成がより単純で効率の良いブラシレス電気機械を提供する。
【解決手段】第1の移動部材は永久磁石対(10pair)を少なくとも1つ含む磁石集合体(20)を備えており、第2の移動部材は電磁コイル(30)を含んでいる。制御回路は、電磁コイル(30)への電力の供給又は電磁コイル(30)からの電力の回生を制御する。永久磁石対(10pair)は、第1の極同士が互いに接する同極接触面(10c)上の磁場方向(MD)であって、永久磁石対の中央から外側に向かう磁場方向(MD)に沿って最も強い磁場を発生する。電磁コイル(30)は、磁場方向(MD)と交差する方向(CD)に電流が流れるように配置されている。
(もっと読む)
磁極検出器付き同期電動機
【課題】磁極検出器を用いずに電動機が一定の回転動作を行なうだけで、その駆動電流や電圧などの情報から間接的に磁極位置を算出する手法では、読み取った間接情報の誤りや外乱などによって磁極位置を誤検出する可能性が残ってしまう。
【解決手段】可動子と固定子のどちらか一方に磁石が設置され、磁石の近傍に磁極検出器を備えた同期電動機において、同期電動機の可動子の位置と組み立て調整後の磁極検出器により検出された磁石の第1の磁力データとを対応づけて記憶しておく記憶手段と、運転中の同期電動機の可動子の位置に対応した磁極検出器により検出した磁石の第2の磁力データと、第1の磁力データを比較する比較手段と、第2の磁力データが第1の磁力データより所定の閾値分大きいかまたは小さい場合に磁石の異常と判定する判別手段とを有することを特徴とする。
(もっと読む)
リニアモータ式自動ドア
【課題】不用意にドアが手動モードに設定されて反開きになるのを防止し、かつ開動作中のドア本体を閉アシストした場合、閉端位置まで戻されてドアが全閉となるように使い勝手を良くしたリニアモータ式自動ドアを提供する。
【解決手段】開アシスト操作(ステップ106)と、その後手動モード判別時間内(ステップ112)の閉アシスト操作(ステップ113)を行うことで、始めて手動モード(ステップ114)に設定され、単に所定距離以上閉アシスト操作するだけでは手動モードにならないように制御する。手動モード判別点を開端直前点に設定する。開端直前でドア本体を開アシスト操作するとドア本体が開端に衝当する。そして、衝当後手動モード判別時間内に閉アシスト操作すると、手動モードに設定される。開動作中のドア本体を閉アシストして自動モード判別距離以上移動させると(ステップ104)、自動モードになってドアが全閉になる。
(もっと読む)
リニアモータの原点設定方法
【課題】再現性のよい安定したリニアモータの原点設定方法を提供する。
【解決手段】予め設定した所定の方向に可動子を移動させ、磁気特性急変位置検知部によって検知した磁気特性急変位置を原点設定基準位置とし、この原点設定基準位置から、磁気式リニアエンコーダの絶対位置の基準位置を設定する。
(もっと読む)
電磁アクチュエータおよびレンズ駆動ユニット
【課題】構造が簡単で、可動範囲を大きく取ることができ、しかも停止精度の高い電磁アクチュエータを実現する。
【解決手段】コイル3a〜3d、ヨーク4a〜4dからなる複数の電磁石を設けた可動子1を、所定の間隔で対向する一対の固定子5a、5b間に挟み込むように配置し、コイル3a〜3dに対する通電タイミングを制御することにより、可動子1を揺動させる。これによって、可動子1を固定子5a、5bの一方から他方へと交互に接触させることにより、ガイド部材6に沿って移動させる。磁性体からなる固定子5a、5bの長さを延ばすだけで、可動子1の可動範囲を大きく取ることができる。
(もっと読む)
リニアインダクションモータ駆動システム
【課題】吸引力を監視し、過大な吸引力の発生を抑えることで、安全性の高いリニアインダクションモータ駆動システムを提供する。
【解決手段】電気車202の車上側に、可変電圧、可変周波数の交流を出力する電力変換装置と、電力変換装置から電力を供給され、リニアインダクションモータの一次回路となるコイル巻線とを搭載し、地上側に、リニアインダクションモータの二次導体となるリアクションプレート203を設け、リニアインダクションモータにより電気車を駆動するリニアインダクションモータ109の駆動システムにおいて、電気車の車上側に、吸引力を演算する制御器と、吸引力の演算結果が設定された値を下回るように制御する吸引力監視制御器111を設けた。吸引力を演算する制御器は、リニアインダクションモータ109に加える電圧、電流、周波数から吸引力を演算した結果に応じて、リニアインダクションモータに加える電圧、電流、周波数を補正する。
(もっと読む)
1 - 20 / 46
[ Back to top ]