
Fターム[5H540EE01]の内容
Fターム[5H540EE01]の下位に属するFターム
計算機を用いるもの (91)
Fターム[5H540EE01]に分類される特許
1 - 20 / 28
線形運動デバイスの制御装置、線形運動デバイスの制御方法
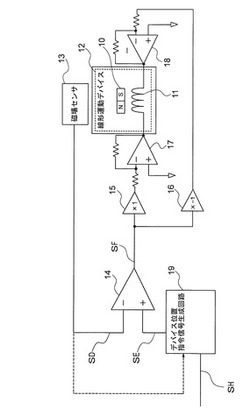
【課題】検出磁場がコイル磁場の干渉を受ける場合にも、制御可能な範囲が変化しない線形運動デバイスの制御装置を提供する。
【解決手段】線形運動デバイス12の磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12を移動すべき目標位置を指示する目標位置信号SHに基づくデバイス位置指令信号SEを補正して出力するデバイス位置指令信号生成回路19、出力信号SD、デバイス位置指令信号SEの偏差を示す操作量信号SFを出力する差動増幅器14、操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって制御装置を構成する。デバイス位置指令信号生成回路19は、デバイス位置指令信号SEをコイル電流によって発生する磁場に対応する補正値によって補正する。
(もっと読む)
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器

【課題】スプリングリターン機構付きVCMの振動を抑制する。
【解決手段】制御部30は、ボイスコイルモータ110の目標ストローク量を指示する指令値を受け、制御信号V2を生成する。制御信号S2は、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータ110の共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する。駆動電流生成部10は、ボイスコイルモータ110のコイルに、制御信号S2に応じた駆動電流Idrvを供給する。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
リニアモータ装置とリニアモータ装置を駆動する方法
【課題】スイッチングリップルによる他の駆動回路への影響を低減したリニアモータ装置とリニアモータ装置を駆動する方法とを提供することを目的とする。
【解決手段】ライン状に整列され、順次電流駆動される複数のリニアモータと、複数のリニアモータコイルの各々に隣接して配置される複数のリップル相殺用リニアモータと、を備えリップル相殺用リニアモータは、隣接するリニアモータが電流駆動される場合に、リニアモータにより生成される磁界を低減させるように、リップル相殺用リニアモータのコイルにリップル成分のみを供給するリニアモータ装置とする。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、入力信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、入力信号のうち、共振周波数より低い所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、一方のデジタルフィルタには、目標電流信号が入力され、他方のデジタルフィルタには、一方のデジタルフィルタの出力信号が入力される。
(もっと読む)
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器
【課題】スプリングリターン機構付きVCMの振動を抑制可能な制御技術を提供する。
【解決手段】駆動回路100は、スプリングリターン機構付きボイスコイルモータ110を駆動する。駆動電流生成部10は、ボイスコイルモータ110のコイルL1に、アナログ制御信号V2に応じた駆動電流Idrvを供給する。波形メモリ40は、ボイスコイルモータ110の駆動電流Idrvの時間波形を記述するデジタルの波形データWDを格納する。波形データWDは、その周波数成分から所定の周波数成分が取り除かれている。制御部30は、ボイスコイルモータ110の共振周波数f0に応じたレートで、波形メモリ40から波形データWDを読み出し、デジタルコードS2として出力する。D/Aコンバータ16は、デジタルコードS2をアナログ制御信号V2に変換し、駆動電流生成部10へと出力する。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動が収束するまでの収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、前記アクチュエータの共振周波数を含む周波数帯域を減衰させるデジタルフィルタと、前記デジタルフィルタの出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、前記電流制御信号に応じて前記ボイスコイルモータに前記駆動電流を供給する駆動回路と、を有する。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時において、最適な停止制御を実現する。
【解決手段】リニア振動モータ200の駆動制御回路100において、駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号であって、駆動部20がハイインピーダンス状態に制御されるハイインピーダンス期間を含む駆動信号を生成する。誘起電圧検出部30は、ハイインピーダンス期間にコイルL1に発生する誘起電圧を検出する。コンパレータ41は、所定の不感帯では出力レベルが変化しないヒステリシスコンパレータとしての機能を備え、ハイインピーダンス期間に、ハイレベル信号またはローレベル信号を出力する。駆動信号生成部10は、コンパレータ41から、連続する前記ハイインピーダンス期間に、連続して同相信号が出力されたとき、リニア振動モータ200が停止したと判定する。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの固有振動数と駆動信号の周波数とが一致するよう、駆動信号の周期幅を適応的に制御する際、コイルに発生する誘起電圧のゼロクロスの検出精度を高める。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、非通電期間においてコイルL1に発生するゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。ゼロクロス検出部40は、誘起電圧以外の電圧のゼロクロスの検出を回避するための検出窓を設定し、その検出窓内で検出されたゼロクロスを有効とし、その検出窓外で検出されたゼロクロスを無効とする。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】円滑で正確な位置決めを行うことができるモータ制御方法およびモータ制御装置を提供する。
【解決手段】 誤差補償後位置検出値と前記位置検出値との差分である誤差補償関数として、前記位置指令値を等速変化させる条件下において前記位置指令値と前記誤差補償後位置検出値との差分を最小化するような、前記検出誤差に対応する周期性をもつ関数を求める。また、求められた前記誤差補償関数を適用して、前記誤差補償後位置検出値を前記位置指令値に一致させるように前記モータの位置制御を実行する。
(もっと読む)
駆動制御装置、駆動制御方法および撮像装置
【課題】簡素な検出回路により移動部材を駆動するコイルから発生する磁気成分を検出して、安定した移動部材の駆動を制御する。
【解決手段】移動部材14を駆動する移動部材駆動部106と、移動部材の制御目標位置を演算する目標位置演算部102と、移動部材駆動部から発生する磁気成分を検出する磁気成分検出部108と、磁気成分検出部により検出された磁気成分から所定の磁気成分を減算する磁気成分減算部110と,磁気成分減算部により減算された磁気成分に基づいて、移動部材の現在位置を検出する現在位置検出部112、移動部材14が目標位置演算部102により演算された制御目標位置に追従するように、現在位置と制御目標位置との差分に応じて移動部材の駆動を制御する制御部104とを備える。
(もっと読む)
電磁アクチュエータ制御装置及び方法
【課題】電磁アクチュエータにおいて、プランジャの位置を正確に検出する。
【解決手段】電磁アクチュエータ制御装置は、巻回されたコイル(210)と、コイル内に挿入されたプランジャ(220)と、コイルに通電を行うことで、プランジャを駆動する電流出力手段(110)と、通電に係る電流の時間平均を一定にするように、通電に対してパルス幅変調制御を行う電流制御手段(120)と、プランジャの駆動による誘起電圧を特定する誘起電圧特定手段(150)と、特定された誘起電圧がゼロである場合に、コイルのインダクタンスを算出するインダクタンス算出手段(170)と、算出されたインダクタンスに基づいて、プランジャの位置を検出する位置検出手段(180)とを備える。
(もっと読む)
移動体機構
【課題】 移動体機構の性能を向上させること
【解決手段】 本発明の移動体機構は、移動体を駆動するためのコイルを有する電磁石と、前記電磁石に発生する誘起電圧を計測するサーチコイルと、入力部を有し、前記入力部に入力される指令情報と計測された誘起電圧の積分値とに基づいて前記電磁石をフィードバック制御する制御機構であって、前記コイルに電流を供給するアンプを含む制御機構と、前記アンプの入力部の信号を時間積分する第1積分器を有し、前記指令情報が零を示すときに前記第1積分器の出力を前記制御機構の前記入力部にフィードバックして前記アンプが前記コイルに供給する電流を零とするオフセット補償機構と、を備え、前記制御機構は、前記サーチコイルで計測された誘起電圧を時間積分する第2積分器を有し、前記第2積分器の入力部に前記第2積分器のドリフトを補正するためのドリフト補正信号が入力される。
(もっと読む)
スライドドア等のリニア駆動部
本発明は、殊にスライドドア用の、各走行路に沿って動く部分に対する、リニアモータに基づくリニア駆動部(1)に関する。本発明の、走行路に沿って動く少なくとも1つの部分、殊にスライドドア扉(4)のためのリニア駆動部(1)は、この少なくとも1つの部分のために少なくとも1つのリニアモータを有している。リニアモータには固定子部分(3)およびキャリッジ(2)が設けられている。リニア駆動部(1)はさらに駆動制御回路を有している。この駆動制御回路は、リニアモータに対するエネルギー供給が行われていない場合には、スイッチオフおよび、リニアモータをジェネレータとして作動させることによってリニアモータを停止させる。さらにこのような可動部分は、自身の走行能力に関して駆動制御回路からイネーブルにされる。さらに、本発明のリニア駆動部(1)は、前記少なくとも1つのリニアモータのエネルギー供給をスイッチオフするためのスイッチング手段を有している。 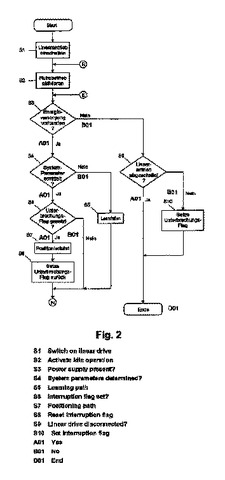 (もっと読む)
(もっと読む)
リニアアクチュエータ
【課題】ディジタル処理上で発生する遅延時間をみかけ上補正したフィードバック信号を生成することを可能としたリニアアクチュエータを実現する。
【解決手段】面モータを有するスライダの位置検出値と位置指令値との偏差を演算して速度指令値を出力する位置制御手段と、前記スライダの速度検出値と前記速度指令値との偏差を演算して前記面モータに推力指令を出力する速度制御手段とを具備するリニアアクチュエータにおいて、
前記位置検出値の現在値及び過去にサンプルした位置検出値に基づいて、1サンプル後の前記速度検出値を予測演算する速度予測手段を備える。
(もっと読む)
ソレノイドを制御する装置および方法
【課題】ソレノイド(22)の動作を制御するための装置(1、50)および方法(400、500、600)を提供する。
【解決手段】ソレノイド(22)の動作を制御するための装置(1、50)および方法(400、500、600)は、所定の状態に応答して活動化信号(14’)を受け取るように構成された制御回路(1、50)を含む。制御回路は、前記活動化信号に応答して、第1の所定の期間、ソレノイドに第1の付勢信号を供給し、第2の所定の期間、第1の付勢信号を切断する。制御回路はさらに、第3の所定の期間、ソレノイドに第2の付勢信号を供給する。
(もっと読む)
制御装置及び露光装置
【課題】外乱などに起因する変動を効果的に抑えること。
【解決手段】制御装置は、制御対象を駆動する駆動部と、前記制御対象の位置を計測する位置計測部と、前記制御対象の位置と前記制御対象を駆動するための駆動制御値とが関連付けられた参照テーブルを作成するテーブル生成部と、前記参照テーブルを参照して前記位置計測部で計測された前記制御対象の位置に対応する参照値を出力する参照部と、前記参照部から出力された前記参照値を補正するための補正係数を生成する補正係数生成ユニットと、前記補正係数を用いて前記参照値を補正し補正指令値を生成する補正部と、前記補正指令値を前記駆動制御値に加算する加算部と、を備える。
(もっと読む)
モータ制御装置及び制御方法
【課題】共振系の振動を低減すると共に、動力伝達機構内部や被駆動体に発生する外乱によって生じる振動を低減すること。
【解決手段】フィードバック制御系は、速度制御器13の出力に共振比係数Kを掛け合わせた値を第1の乗算結果として出力する第1の共振比ゲイン付与部14と、ギヤ18の入力側及び出力側のそれぞれの回転角度を検出するための第1、第2の位置検出器20、21と、これらの検出値を用いてギヤ18の捻り量を算出する換算部22及び減算器23とを含む。フィードバック制御系はまた、算出された捻り量から被駆動体19の運動による反力の推定値を算出するゲイン付与部26と、算出された反力の推定値に(1−K)を掛け合わせた値を第2の乗算結果として出力する第2の共振比ゲイン付与部27と、前記第1の乗算結果と前記第2の乗算結果とを足し合わせた値を最終的なトルク指令値としてトルク制御器16に出力する加算器15とを含む。
(もっと読む)
1 - 20 / 28
[ Back to top ]