
Fターム[5H540EE05]の内容
リニアモータの制御 (2,479) | 制御、演算 (578) | フィードバック制御をするもの (314) | 位置をフィードバックするもの (150)
Fターム[5H540EE05]に分類される特許
1 - 20 / 150
リニアコンベア
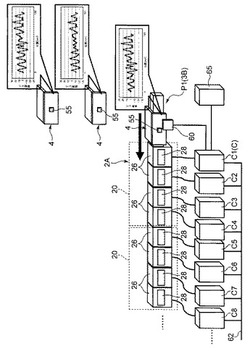
【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
線形運動デバイスの制御装置、線形運動デバイスの制御方法

【課題】検出磁場がコイル磁場の干渉を受ける場合にも、制御可能な範囲が変化しない線形運動デバイスの制御装置を提供する。
【解決手段】線形運動デバイス12の磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12を移動すべき目標位置を指示する目標位置信号SHに基づくデバイス位置指令信号SEを補正して出力するデバイス位置指令信号生成回路19、出力信号SD、デバイス位置指令信号SEの偏差を示す操作量信号SFを出力する差動増幅器14、操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって制御装置を構成する。デバイス位置指令信号生成回路19は、デバイス位置指令信号SEをコイル電流によって発生する磁場に対応する補正値によって補正する。
(もっと読む)
線形運動デバイスの制御装置、線形運動デバイスの制御方法
【課題】 線形運動デバイスが端点間の移動の際に発生する衝突音を抑制する。
【解決手段】磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12が目標位置にある場合に出力されるデバイス位置指令信号SEを出力するデバイス位置指令信号生成回路22と出力信号SDとデバイス位置指令信号SEとの偏差を示す操作量信号SFを出力する差動増幅器14、線形運動デバイス12に、XBOTに向かう力とXTOPに向かう力とを交互に加えながら、XBOT、XTOP間を移動させるドライバ制御信号SGを出力する端点移動制御回路19、ドライバ制御信号SG、操作量信号SFのいずれか一方を選択するスイッチ20、ドライバ制御信号SGまたは操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって線形運動デバイスを制御する。
(もっと読む)
リニア搬送装置
【解決手段】 リニア搬送装置3は、複数の永久磁石13aからなる可動子13と、複数のコイル14aからなる複数の固定子14と、上記可動子13の永久磁石13aの磁界を検出するホール素子17とを備えている。
さらに、上記可動子13における先頭の永久磁石13aよりも搬送方向後方に検出片18を設けるとともに、当該検出片18を検出するセンサ19を上記可動子13の搬送経路上に設ける。
上記ホール素子17が検出した可動子13の先頭の永久磁石13aの磁界から可動子13の位置を認識すると、当該認識した可動子13の位置を仮位置とし、さらに上記センサ19が上記検出片18を検出すると、当該センサ19が検出片18を検出した位置を可動子13の実位置として上記仮位置から置き換え、当該可動子13の実位置を基準に可動子13の位置を認識する。
【効果】 可動子の位置を高精度に認識することができる。
(もっと読む)
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
リニアモータの制御判断方法および制御装置
【課題】可動子を曲線状にも移動させるリニアモータにおける、制御可能性を判断する。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
リニアモーター
【課題】リニアモーターの制御性を向上させる技術を提供する。
【解決手段】リニアモーター10は、スライダー20と、ステーター30とを備える。スライダー20は、複数の永久磁石21が、同じ極同士が互いに対向するように直列に配列された磁石列21lを有し、電磁力によって磁石列21lの配列方向に沿って移動する。ステーター30は、スライダー20の移動方向に沿って配列された2相の電磁コイル31a,31bを備える。また、リニアモーター10は、スライダー20の移動を制御するために、磁石列21lの移動に伴う磁束の変化を検出する位置検出センサー40を備える。位置検出センサー40は、電磁コイル31の各相に対応して設けられ、電磁コイル31の外周に配列され、永久磁石21同士の境界における磁束を検出し、各相の電磁コイル31に生じる逆起電圧と等しい位相の波形信号を出力する。
(もっと読む)
リニアモータの制御装置、及びリニアモータ装置
【課題】リニアスケールを用いずにリニアモータの位置決め精度を改善することができるリニアモータの制御装置を提供する。
【解決手段】リニアモータの制御装置は、リニアモータの電機子が有している磁気センサであってリニアモータの駆動用磁石より生じる磁界の方向に応じた信号を出力する磁気センサから出力される信号の変化に基づいてリニアモータの可動子の位置を検出する位置検出部と、位置検出部が検出した可動子の位置と外部より入力される位置指令値とに基づいて速度指令値を算出する位置制御部と、リニアモータに備えられている複数のコイルに流れる電流値から可動子が移動する速度を推定する推定部と、位置制御部が算出する速度指令値と推定部により推定する可動子の推定移動速度とに基づいて電流指令値を算出する速度制御部と、速度制御部が算出した電流指令値に応じて複数のコイルに電力を供給する電力変換器とを備えている。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
ボイスコイルモーター
【課題】ボイスコイルモーターの提供。
【解決手段】ボイスコイルモーターは、可動磁気回路部品43、固定回路部品44、位置感知センサー420、保存媒体421、コントローラー42を備え、可動磁気回路部品43は永久磁石を備え、しかも負荷設置スライド台を物理接続し、固定回路部品44はコイルにより構成し、位置感知センサー420は可動磁気回路部品43の所在位置を探知でき、信号増幅器により位置電気値を出力し、コントローラー42が保存媒体421より、増益値と偏移量補償値とを読み取り、増益値と偏移量補償値に基づき校正後の位置電気信号値は、固定回路部品44のコイルに電力を獲得させた後、固定回路部品44と可動磁気回路部品43が提供する磁力の相互作用の下、負荷設置スライド台は移動範囲内の上端点と下端点との間で移動する。
(もっと読む)
リニアモータの制御装置
【課題】磁気センサが出力する信号に周期的な変動成分が含まれる場合においても、リニアモータを安定して制御する。
【解決手段】リニアモータを制御する制御装置は、外部より入力された単位時間当たりに可動子を移動させる距離を示す位置指令に基づいて、可動子を等速にて移動させる等速制御と、可動子の速度を加速させる加速度制御とのいずれか一方を選択し、等速制御を選択した場合、可動子の速度に対する平均である平均速度と、速度指令とに基づいて、リニアモータに印加する電流値を示す電流指令を算出し、加速度制御を選択した場合、可動子の速度と、速度指令とに基づいて、電流指令を算出し、算出した電流指令に基づいてリニアモータに電流を印加する。
(もっと読む)
リニアモータの可動子
【課題】組となるセンサ列の増加の如何にかかわらず、外周フレーム5の円周面のどの位置に配列したとしても、直径の対向間隔をもって一定に維持された状態で、そのセンサ面をコイルブロック3a中心に向けて取着でき、磁気センサ6の検知電圧の大小出力値の平均化により、シャフト2に軸芯ズレが生じても可動子3が中心に位置するものと擬制して位置検出できるようにする。
【解決手段】筒状ユニット3bに設けられたプリント基板35の円周面に、センサ用の端子部35eを、コイルブロック3aの中心を挟んで対向する線上の一方と他方のそれぞれに、電気角180゜のピッチ幅をもって一列状に複数配設し、かつ、他方の列側を一方の列側に対して電気角90゜をもって位置ズレさせて配置させて、対向取着される磁気センサ6によって、二相信号の検出を行うよう構成する。
(もっと読む)
リニアモータの制御装置
【課題】光学式のアブソリュートエンコーダを用いずに、可動子の絶対位置を検出する。
【解決手段】制御装置は、N極とS極とが交互に等間隔に配列方向に配列されている複数の第1の磁石を備える第1の磁石部と、第1の磁石部に対向して電機子に備えられ第1の磁石が生じさせている磁界を検出し、検出した磁界に応じた信号を出力する第1の磁気センサと、配列方向における可動子の可動範囲を複数に分けた区間それぞれを一意に識別させる複数の第2の磁石であって配列方向に等間隔に配列されている複数の第2の磁石を備える第2の磁石部と、第2の磁石部に対向して電機子に備えられ第2の磁石が生じさせている磁界の磁束密度に応じた信号を出力する第2の磁気センサと、第2の磁気センサが出力する信号から検出された区間と、第1の磁気センサが出力する信号から算出された電気角とに基づいて、可動子の位置を算出する位置算出部とを備える。
(もっと読む)
駆動制御回路およびフォーカス制御回路
【課題】PWM駆動電流に起因するノイズを低減する。
【解決手段】イコライザ30は、対象物の状態に係る目標値とその実測値との差分をもとに、対象物の状態を目標値に合わせるための制御信号を生成する。PWM変調部40は、イコライザ30により生成される制御信号に応じたPWM信号を生成する。Hブリッジ駆動部50は、PWM変調部40により生成されたPWM信号に応じて、対象物の状態を変化させる駆動素子12を駆動するための駆動電流を生成する。スルーレート制御部60は、制御信号に応じて、Hブリッジ駆動部50の電流駆動能力を変化させる。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時において、最適な停止制御を実現する。
【解決手段】リニア振動モータ200の駆動制御回路100において、駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号であって、駆動部20がハイインピーダンス状態に制御されるハイインピーダンス期間を含む駆動信号を生成する。誘起電圧検出部30は、ハイインピーダンス期間にコイルL1に発生する誘起電圧を検出する。コンパレータ41は、所定の不感帯では出力レベルが変化しないヒステリシスコンパレータとしての機能を備え、ハイインピーダンス期間に、ハイレベル信号またはローレベル信号を出力する。駆動信号生成部10は、コンパレータ41から、連続する前記ハイインピーダンス期間に、連続して同相信号が出力されたとき、リニア振動モータ200が停止したと判定する。
(もっと読む)
モータ駆動装置
【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
直線・回転複合アクチュエータシステム
【課題】クローズドループ制御で移動子軸の回転角度を制御できる直線・回転複合アクチュエータシステムを提供する。
【解決手段】直線・回転複合アクチュエータシステムは、軸線方向に直線運動でき、かつ軸線の回りを回転運動できる軸部材82と、軸部材82を囲む中空の回転子88と、回転子88を収容する空間が形成されると共に、回転子88を軸線の回りを回転させる回転モータの固定子92と、回転子88と一緒に回転して回転モータの回転子88の回転を軸部材82に伝えると共に、軸部材82が直線運動するのを許容する直動軸受86,87と、回転子88の回転角度を測定する角度測定装置94と、角度測定装置94が測定した回転モータの回転子88の回転角度が指令値に一致するように、回転モータを制御する回転モータ用ドライバと、を備える。回転モータの回転子88の回転角度を制御することによって、軸部材82の回転角度を制御する。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの固有振動数と駆動信号の周波数とが一致するよう、駆動信号の周期幅を適応的に制御する際、コイルに発生する誘起電圧のゼロクロスの検出精度を高める。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。駆動信号生成部10は、非通電期間においてコイルL1に発生するゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。ゼロクロス検出部40は、誘起電圧以外の電圧のゼロクロスの検出を回避するための検出窓を設定し、その検出窓内で検出されたゼロクロスを有効とし、その検出窓外で検出されたゼロクロスを無効とする。
(もっと読む)
リニア同期モータ
【課題】 固定子の製造コストを低減して、磁気損失の少ないリニア同期モータを提供する。
【解決手段】 一方の端部磁極部33の第1の一対の被連結部分47と、エンドブラケット35の第1の一対の被連結部分51と、端部磁極部37の第1の一対の被連結部分55と、5個の磁極部39の第1の一対の被連結部分59とを一対の磁性筒体41によって接続する。一方の端部磁極部33の第2の一対の被連結部分と、端部磁極部37の第2の一対の被連結部分と、5個の磁極部39の第2の一対の被連結部分とを一対の導磁性成形品43により接続する。一対の磁性筒体41にリニア軸受65を介して一対のガイド軸9をスライド可能に嵌合する。一対の磁性筒体41及び一対の導磁性成形品43によりヨークを構成する。5個の磁極部39のそれぞれを、複数枚の磁性鋼板を軸線方向に積層して構成する。
(もっと読む)
1 - 20 / 150
[ Back to top ]