
Fターム[5H540FC02]の内容
Fターム[5H540FC02]に分類される特許
1 - 20 / 105
リニアモータ制御装置、及び制御方法
【課題】可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減する。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
(もっと読む)
リニアモータ装置とリニアモータ装置を駆動する方法

【課題】スイッチングリップルによる他の駆動回路への影響を低減したリニアモータ装置とリニアモータ装置を駆動する方法とを提供することを目的とする。
【解決手段】ライン状に整列され、順次電流駆動される複数のリニアモータと、複数のリニアモータコイルの各々に隣接して配置される複数のリップル相殺用リニアモータと、を備えリップル相殺用リニアモータは、隣接するリニアモータが電流駆動される場合に、リニアモータにより生成される磁界を低減させるように、リップル相殺用リニアモータのコイルにリップル成分のみを供給するリニアモータ装置とする。
(もっと読む)
リニアモータ制御装置
【課題】電力変換器の切替え時の出力電圧振幅制限に伴う推力リプルを低減させることができるリニアモータ制御装置を提供する。
【解決手段】固定子巻線が界磁可動子の移動方向に複数区分されたリニアモータを、位置センサが検出する界磁可動子位置に基づいて区分毎に備えられた電力変換器を切替えて、界磁可動子を移動させるように固定子巻線に電力を供給するリニアモータ制御装置であって、電力変換器を切替える際、電力変換器の出力電圧制限または出力電流応答遅れを防止するように構成した。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、入力信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、入力信号のうち、共振周波数より低い所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、一方のデジタルフィルタには、目標電流信号が入力され、他方のデジタルフィルタには、一方のデジタルフィルタの出力信号が入力される。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
リニアソレノイドの電流制御装置
【課題】温度や電圧に変化が生じた場合でも所望の電流応答を実現できるリニアソレノイドの電流制御装置を提供することにある。
【解決手段】マイクロコンピュータ22によって目標電流値が変化したと判断された場合には、目標電流値に相当するデューティ値と目標電流前回値に相当するデューティ値との差分を算出する。算出したデューティ値の差分に対して、温度センサSE1の出力値によって温度補正を行う。温度センサSE1の出力値によって補正したデューティ値の差分に対し、さらに電源電圧によって電圧補正を行う。マイクロコンピュータ22は温度と電圧で補正したデューティ値の差分を基に補正後指示電流を算出し、電流制御IC23に出力する。
(もっと読む)
モータの過負荷保護装置
【課題】 特定位置、位相で過負荷が発生するような場合でも、温度検出手段を多数設けることなく過負荷検出が行え、かつ過負荷保護設定値の余裕を少なくできて、モータ性能を十分に利用できるモータの過負荷保護装置を提供する。
【解決手段】 電源スイッチ6をオフとしたときの絶対時刻による稼働停止時刻とこの時のベース部温度とを稼働停止時温度記憶手段13に記憶しておく。再稼働開始時温度算出手段13により、稼働停止時の間の冷却温度を計算して、再稼働開始時のベース部温度を算出する。熱発生源現在温度算出手段15により、再稼働開始時のベース部温度を用いて、各極コイル2aのモータ電流で発熱する各熱発生源の現在温度を算出する。過負荷判定手段16は、各熱発生源の現在温度を、各熱発生源毎に定められた過負荷保護設定値に達すると過負荷であると判定する。
(もっと読む)
モータ駆動回路
【課題】アクチュエータの共振周波数によらず、振動の収束時間を短縮する。
【解決手段】アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、アクチュエータの共振周波数を含む周波数帯域を減衰させるフィルタ回路と、フィルタ回路の出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、電流制御信号に応じてボイスコイルモータに駆動電流を供給する駆動回路と、を有し、フィルタ回路は、目標電流信号のうち、共振周波数を中心とする周波数帯域を減衰させるデジタルノッチフィルタと、デジタルノッチフィルタの出力信号のうち、所定の周波数以上の周波数帯域を減衰させるデジタルローパスフィルタと、を含み、デジタルローパスフィルタのサンプリング周波数は、デジタルノッチフィルタのサンプリング周波数より高い。
(もっと読む)
電気負荷装置の診断装置
【課題】 電気負荷装置(ソレノイド)の地絡等の故障を確実に診断する。
【解決手段】 制御装置(マイコン)から駆動回路への駆動信号と、駆動回路の出力状態に応じたステータス信号とを比較する。具体的には、ステータス信号の立ち上がり時に、駆動信号のレベルを判定し、例えばHレベルで整合性があれば、ステータス信号は有効と判断し、ステータス信号のカウントにより正常と診断する。ソレノイドの地絡故障を生じた場合は、駆動回路の出力が固定され、ステータス信号は発生しなくなる。また、仮に擬似的信号を発生したとしても、その立ち上がり時の駆動信号のレベルを判定し、Hレベルでなければ、ステータス信号は無効と判定する。それゆえ、誤診断を防止できる。
(もっと読む)
ボイスコイルモータの制御方法及びレンズフォーカスシステム
【課題】ボイスコイルモータの制御方法及びレンズフォーカスシステムの提供。
【解決手段】本発明によると、ボイスコイルモータの制御方法は、該ボイスコイルモータのコイル電流の総変動量を分割して多次変動とし、毎次変動する時間を該ボイスコイルモータのスプリング共振周期の2分の1とし、これにより大幅にスプリングの共振程度を低減し、これによりボイスコイルモータをスピーディーに安定させ、ひいてはフォーカス時間を短縮する。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
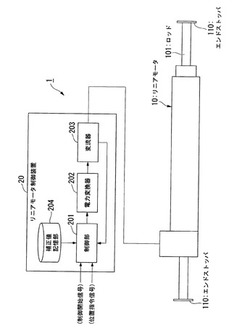
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器
【課題】スプリングリターン機構付きVCMの振動を抑制可能な制御技術を提供する。
【解決手段】駆動回路100は、スプリングリターン機構付きボイスコイルモータ110を駆動する。駆動電流生成部10は、ボイスコイルモータ110のコイルL1に、アナログ制御信号V2に応じた駆動電流Idrvを供給する。波形メモリ40は、ボイスコイルモータ110の駆動電流Idrvの時間波形を記述するデジタルの波形データWDを格納する。波形データWDは、その周波数成分から所定の周波数成分が取り除かれている。制御部30は、ボイスコイルモータ110の共振周波数f0に応じたレートで、波形メモリ40から波形データWDを読み出し、デジタルコードS2として出力する。D/Aコンバータ16は、デジタルコードS2をアナログ制御信号V2に変換し、駆動電流生成部10へと出力する。
(もっと読む)
リニアアクチュエータ駆動装置
【課題】可動子の自重により生じるオフセットズレを補正するリニアアクチュエータ駆動装置を提供する。
【解決手段】駆動装置1は、駆動指令Irefに応じて可動子23を往復させる電磁駆動部10と、通電がなされていない時、可動子23が自重により所定の移動可能範囲Dの中心Dcからズレて可動範囲W1が移動可能範囲Dよりも狭くなる場合に、可動子23の往復動中心Wcと移動可能範囲Dの中心Dcとの偏差を無くする方向へ可動子23の往復動中心Wcを移動させるオフセット通電をなすように駆動指令Irefを補正するオフセット補正部11とを有している。オフセット補正部11は、駆動指令Irefに応じた可動子23の振幅値Lpに対応する振幅情報を取得し、振幅情報に対応する振幅値Lpに対して可動振幅(W1/2)が可動域不足状態となる場合に駆動指令Irefの補正する一方、可動域不足状態でない場合に駆動指令Irefの補正を解除する。
(もっと読む)
リニアモータの制御装置
【課題】磁気センサが出力する信号に周期的な変動成分が含まれる場合においても、リニアモータを安定して制御する。
【解決手段】リニアモータを制御する制御装置は、外部より入力された単位時間当たりに可動子を移動させる距離を示す位置指令に基づいて、可動子を等速にて移動させる等速制御と、可動子の速度を加速させる加速度制御とのいずれか一方を選択し、等速制御を選択した場合、可動子の速度に対する平均である平均速度と、速度指令とに基づいて、リニアモータに印加する電流値を示す電流指令を算出し、加速度制御を選択した場合、可動子の速度と、速度指令とに基づいて、電流指令を算出し、算出した電流指令に基づいてリニアモータに電流を印加する。
(もっと読む)
モータ駆動回路
【課題】 アクチュエータの共振周波数によらず、振動が収束するまでの収束時間を短縮する。
【解決手段】 アクチュエータを駆動するボイスコイルモータに供給される駆動電流の目標値を示すデジタル信号である目標電流信号のうち、前記アクチュエータの共振周波数を含む周波数帯域を減衰させるデジタルフィルタと、前記デジタルフィルタの出力信号をアナログ信号に変換して電流制御信号として出力するデジタル・アナログ変換器と、前記電流制御信号に応じて前記ボイスコイルモータに前記駆動電流を供給する駆動回路と、を有する。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
洗濯機の制振装置
【課題】洗濯槽重量のアンバランスに応じた最適な制振制御を、リニアモータのベクトル
制御を用いることでリアルタイムに行うことができる制振装置を提供する。
【解決手段】洗濯槽と筐体の間に配置されたリニアモータおよび弾性体と、前記リニアモ
ータの巻線に通電される電流を検出し、電流信号を出力する電流検出手段と、前記リニア
モータの可動子の相対位置を検出して前記可動子の移動距離を演算する位置演算部と、前
記洗濯槽または前記筐体の加速度を検出し、加速度信号を出力する加速度センサと、前記
移動距離、前記加速度信号および前記弾性体の弾性定数に基づき、加振力信号を演算する
加振力演算部と、前記加振力信号と目標振動値との差分に基づき、指令q軸電流値を出力
するトルク制御部と、前記電流信号と、前記指令q軸電流値に基づいて、前記巻線に対す
る通電を制御する通電制御手段とを有することを特徴としている。
(もっと読む)
電動機の制御装置および制御方法
【課題】1台の電圧形インバータで誘導電動機と同期電動機の双方を所望の速度に制御する。
【解決手段】誘導電動機速度制御器12は、誘導電動機1の回転速度指令値ωIM*と、誘導電動機1の回転速度ωIMとの偏差から比例積分制御等により磁極方向電流指令値Id*を演算する。同期電動機速度制御器13は、同期電動機2の回転速度指令値ωSM*と、同期電動機2の回転速度ωSMとの偏差から比例積分制御等により磁極直交方向電流指令値Iq*を演算する。dq軸電流制御器14は、磁極方向電流指令値Id*と磁極方向電流値Idとの偏差、および、磁極直交方向電流指令値Iq*と磁極直交方向電流値Iqとの偏差から、比例積分制御等により磁極方向電圧指令値Vd*および磁極直交方向電圧指令値Vq*を演算する。
(もっと読む)
制振制御システム及び電気機器
【課題】急峻に変化する振動に対する応答性を向上させ、その上で電力回生することができる制振制御システム,及びその制振制御システムを提供する。
【解決手段】洗濯機21の基部12と水槽14との間に、リニアモータ1とスプリング15とを組み合わせてなる電磁式サスペンション11を配置しリニアモータ1の固定子7側に位置センサ8を配置する。制御装置41は、位置演算部55により位置センサ8より出力される位置信号に基づいて位置θeを検出し、微分器57により速度vを検出すると、位置θe及び速度v及び基部12に取り付けられた加速度センサ16より出力される加速度信号aとモータ電流Ia,Ib,Icとに基づきリニアモータ1をベクトル制御して、洗濯運転時に水槽14について生じる振動を目標値まで抑制し、かつ、そのときに得られる最大の電力を回生する。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
1 - 20 / 105
[ Back to top ]