
Fターム[5H560DA00]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428)
Fターム[5H560DA00]の下位に属するFターム
磁気的手段(エンコーダは除く) (911)
光学的手段(エンコーダは除く) (22)
エンコーダ、パルスジェネレータ (247)
レゾルバ (380)
近接スイッチ (3)
位置検出器を用いずに位置検出するもの (1,239)
その他の検出手段 (8)
検出系が複数組あるもの (25)
位置検出器の個数が1であるもの (99)
位置検出器の個数が2であるもの (39)
位置検出器の個数が3であるもの (119)
位置検出器の個数が4以上であるもの (13)
Fターム[5H560DA00]に分類される特許
1 - 20 / 323
電気自動車のモータ制御装置
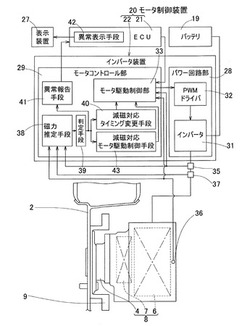
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
モータの制御装置

【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行えるモータの制御装置を提供する。
【解決手段】 モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設ける。温度センサSaで検出される温度Tcに対し複数の閾値が設定され、各閾値で区分される温度領域毎に、互いに異なる電流制限条件が設定され、検出される温度Tcの含まれる前記温度領域の前記電流制限条件に応じてモータ6の電流値を制限するモータ電流制限手段95を設けた。
(もっと読む)
モータ制御装置
【課題】 少ないメモリ容量のトルク補正データで、負荷トルク変動および発生トルク変動を抑制するとともに、モータをより平滑に駆動し、モータを内蔵した圧縮機の振動および騒音を抑制することができるモータ制御装置を提供する。
【解決手段】 補正データ作成部21は、回転位置検出部19によって更新された回転位置情報に基づいて、補正用正弦波データテーブル20から、負荷トルク変動補正データとと発生トルク変動補正データとを読み出し、読み出した発生トルク変動補正データをトルク定数の周期変動成分kとする。そして、トルク定数の周期変動成分kから、発生トルク変動補正データicを求め、負荷トルク変動補正データiと発生トルク変動補正データicとを合算し、合算したトルク変動補正データをPWM作成部18に送る。
(もっと読む)
ブラシレスモータの駆動制御装置およびハンチング防止方法
【課題】ハンチングを未然に防止する。
【解決手段】ステータに設けられた複数相の電機子コイルに流す電流を制御することにより、ロータを回転させるブラシレスモータの駆動制御装置1は、複数相の電機子コイルに対して通電を行なうインバータ回路2と、インバータ回路2を駆動するための駆動信号を生成するプリドライブ回路3と、単位時間ごとにロータの回転位置を検出するとともに、検出された回転位置に同期して単位時間ごとにパルス列が変化する複数のパルス信号を生成する回転位置検出器5と、ロータの回転方向が逆回転方向から正回転方向に変化する際に、プリドライブ回路3に対して駆動信号のオンデューティ比を増大させるデューティ指令部11と、を備える。
(もっと読む)
電気掃除機
【課題】応答性の高いインバータにより吸込み圧力を制御することにより、作業性の高い掃除機を実現すること。
【解決手段】交流電源1より与えられる交流電力は直流に変換された後、インバータ回路4に入力され任意の周波数の3相交流に変換され、接続されたモータ5およびファン6を任意の回転数で駆動する。電流制御手段9は、モータ5に流れる電流を所望の電流値になるように制御する。さらに圧力制御手段10は、掃除機の吸込み圧力を検出する圧力センサ8の検出値を外部より与えられる目標圧力指示値になるようにモータ5に流れる電流値の目標値を設定することにより、モータ5に流れる電流を制御することによって、掃除機の吸込み圧力を掃除作業性に最適な圧力値に制御することができる。
(もっと読む)
駆動装置
【課題】モータの動作可能領域のうち非昇圧領域が狭くなるのを抑制する。
【解決手段】コンデンサの電荷を放電させる所定放電処理を実行したときの電流積算値Icと放電開始前電圧VHstartと放電終了後電圧VHendとを用いてコンデンサの容量Cvhを計算し、計算したコンデンサの容量Cvhに応じて共振領域の下限回転数Nrfminおよび上限回転数Nrfmaxを設定し、設定した共振領域の下限回転数Nrfminおよび上限回転数Nrfmaxを用いて共振領域が昇圧領域に含まれるよう昇圧領域と非昇圧領域とを区分する昇圧/非昇圧ラインを設定する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】PMW制御中の三相同期モータに発生するトルクの変動や異音を抑制することが可能な、モータ制御装置及びモータ制御方法を提供する。
【解決手段】三相電圧指令値(VUCMD、VVCMD、VWCMD)をパルス幅変調で制御して三相同期モータ2を制御するモータ制御装置1であって、三相同期モータ2に供給されるQ軸電圧VQ及びD軸電圧VDに基づいて、三相電圧(VU、VV、VW)を算出するDQ‐UVW変換部22と、DQ‐UVW変換部22が算出した三相電圧(VU、VV、VW)を三乗した値を、Q軸電圧VQとD軸電圧VDとの二乗和で除算して、三次高調波を演算し、さらに、演算した三次高調波を三相電圧(VU、VV、VW)に重畳して、三相電圧指令値(VUCMD、VVCMD、VWCMD)を演算する三次高調波重畳部24を備える。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
永久磁石回転電機及びその運転方法
【課題】高速時の誘導起電力の低減と低速時の高トルク特性が可能な永久磁石回転電機。
【解決手段】本発明は、電機子巻線23を8極にして所定の短時間だけ大電流の磁化電流を流すことによって発生する磁界により可変磁力磁石それぞれを同一方向に着磁させ、磁石トルク主体の8極PMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を隣り合う磁石間で互いに逆方向に磁化させて磁石トルクとリラクタンストルクの両方で動作する4極IPMモードとし、電機子巻線を4極にして所定の短時間だけ磁化電流を流すことによって発生する磁界により4個の可変磁力磁石を消磁してリラクタンストルクのみで動作する4極RMモードとし、起動時及び速度領域の移行時にこれら8極PMモード、4極IPMモード及び4極RMモードの間で相互にモードを切り替えて可変速運転する永久磁石回転電機。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
モータ駆動装置
【課題】 モータ角度検出器に故障が生じても、モータロータの磁極位置に応じた制御が行えて、モータ駆動が行えるモータ駆動装置を提供する。
【解決手段】 車輪駆動用のモータ6につき、モータ角度検出器36の角度検出値に従い、磁極位置に応じた制御をする基本駆動制御部38を備えたモータ駆動装置20に適用する。モータロータの角度の推測をセンサレスで行うセンサレス角度検出手段46と、モータ角度検出器36の故障を判別するセンサ故障判別手段48を設ける。故障と判別された場合に、基本駆動制御部38による制御を、モータ角度検出器36による角度検出値に代えて、センサレス角度検出手段46の出力で行わせるセンサ切替え手段49を設ける。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
駆動装置
【課題】電動機を駆動するためのインバータの制御モードを矩形波制御モードから正弦波制御モードに切り替える際の電動機の出力トルクの変動を抑制する。
【解決手段】駆動電圧系の電圧VHの上昇を伴って矩形波制御モードから正弦波制御モードに切り替えるときには、矩形波制御モードから過変調制御モードに切り替えて(S200)、電流指令Id*,Iq*を保持してインバータを制御すると共に電圧VHが切替目標電圧VHchまで上昇するよう昇圧コンバータを制御し(S210〜S230)、電圧VHが保持されるよう昇圧コンバータを制御すると共に電流指令Id*,Iq*を切替目標電流Idch,Iqchに向けて等トルクライン上を移動させながらインバータを制御し(S240〜S260)、過変調制御モードから正弦波制御モードに切り替える(S270)。
(もっと読む)
1 - 20 / 323
[ Back to top ]