
Fターム[5H560DB00]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604)
Fターム[5H560DB00]の下位に属するFターム
磁気的手段(エンコーダは除く) (181)
光学的手段(エンコーダは除く) (9)
速度発電機(TG) (10)
エンコーダ、パルスジェネレータ (78)
速度検出器を用いずに速度検出するもの (364)
その他の速度検出 (10)
位置検出器の出力に重畳させるもの (6)
位置検出器と兼用するもの (847)
Fターム[5H560DB00]に分類される特許
1 - 20 / 99
電気自動車のモータ制御装置
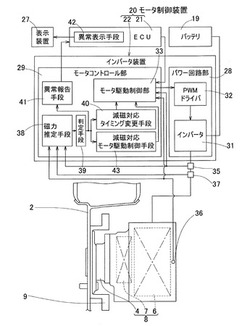
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
モータ駆動装置

【課題】外部からアナログの制御電圧によって、PWM出力電圧デューティの演算を行い、そのPWM演算器のオフセット、ゲインばらつきの影響に対して、モータ速度を一定とするモータ駆動装置を提供すること。
【解決手段】モータ制御端子の電圧がV1「V」〜V2「V」の範囲の時に前記PWM演算器の出力電圧デューティをD1%とし、同様にV2「V」〜V3「V」の範囲の時にD2%、・・・、VN「V」〜VN+1「V」の範囲の時にDN%とするモータ駆動装置である。
(もっと読む)
スイッチング回路の制御装置
【課題】スイッチング回路の損失を低減させる。
【解決手段】所定のスイッチング周期において、ハイ側スイッチング素子のオンデューティとロー側スイッチング素子のオンデューティとを独立に設定可能なPWM演算部25を備え、PWM演算部25は、前回までの複数のスイッチング周期におけるオンデューティの積算値を算出する通電割合演算部25aを備える。PWM演算部25は、通電割合演算部25aによって算出されたオンデューティの積算値に基づいて、順方向電流が流れていないスイッチング素子のオンデューティを設定する。
(もっと読む)
モータ制御装置
【課題】ブラシレスモータの始動時における立ち上がりの応答性を向上させる。
【解決手段】制御ユニットにてモータの停止指令が伝達されると(S121)、S122にて今回の停止指令が通常の停止指令であるか否かを判定する。通常の停止指令である場合にはS125にて通常停止制御を実行する。通常停止制御では、目標モータ回転数を停止指令伝達時の値から徐々に減少させることにより回転数制御を継続しつつモータの実回転数Nを徐々に低下させる。S126では、モータの実回転数Nと所定回転数Ns(例えば0rpm付近の値)とを比較し、N≦Nsか否かを判定する。N≦Nsとなった時点でS127に進み、ロータ位置決め処理を行う。ロータ位置決め処理では、例えば、特定の相巻線に通電してロータをわずかに回転させることにより、ロータ磁極位置を予め定めた位置まで移動させる。
(もっと読む)
モータの回転制御装置及び方法、並びにそれを用いた画像形成装置
【課題】 瞬間的にクロックが入力されなかった場合でも回転を維持できるPLL制御を用いたモータの回転制御装置及び方法、並びにそれを用いた画像形成装置を提供する。
【解決手段】 PLL制御部12がクロックCKと位置検出信号Stとの差を偏差信号Seとして出力し、コントロール部202が偏差信号と位相検出信号Sfとから駆動信号Smを出力する、モータの回転制御装置において、コントロール部は、偏差信号が入力された場合、駆動信号を遅延させた遅延駆動信号Smdを出力し、遅延駆動信号の出力を開始してから所定時間が経過した後、駆動信号を遅延させずに出力し、モータの使用回転速度は最低回転速度の2倍以上であり、遅延時間は使用回転速度に対応するクロック周期の2倍以上の整数倍であり、所定時間は遅延時間以下である。これにより、瞬間的にクロックが入力されなかった場合でもモータの回転を維持することできる。
(もっと読む)
モータ駆動回路
【課題】モータを迅速に起動すること。
【解決手段】モータの正方向又は逆方向の回転を指示する回転方向指示信号に応じて、モータを正方向又は逆方向に回転させるための駆動信号を出力する駆動回路1と、モータの回転数が基準回転数よりも高いか否かを比較する回転数比較回路4と、回転方向指示信号が変化すると回転数比較回路4の比較結果に基づいて制動を制御するショートブレーキ制御回路2と、回転方向を変更する通電相順序切替制御回路3と、モータが停止しているときに回転方向指示信号が変化すると、回転数比較回路4の比較結果に関わらず、モータの制動動作が行われずにモータの回転方向が変更されるように駆動回路1を制御する為の判断回路110と、を備える。
(もっと読む)
モータ制御装置、モータ制御システム、モータ制御プログラム
【課題】運転モードに応じてモータの駆動を高効率で制御可能なモータ制御装置を提供する。
【解決手段】電流指令ベクトルの向きに応じた抑制電流成分によって抑制された後の誘起電圧を電圧検出部で検出される電源電圧Vbatよりも小さくする方向に抑制する第1電流指令ベクトルAvを決定する第1電流指令ベクトル決定部2aと、実測値に基づき予め記憶させている効率情報において回転数検出部で検出した回転数と外部から指示されたトルク指令Trefとに関連付けられた第2電流指令ベクトルAbaseを決定する第2電流指令ベクトル決定部2bとを備え、トルク出力優先モード時は第1電流指令ベクトルAvでモータの駆動を制御し、効率優先モード時は第2電流指令ベクトルAbaseでモータの駆動を制御するように構成した。
(もっと読む)
永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両
【課題】永久磁石同期モータが強制的に回転させられた場合に生じる回生電圧を部品点数の増加なしに抑制して低コスト化できる永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両を得ることを目的とする。
【解決手段】回生運転時に、直流電圧検出手段90が検出した増大する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を短絡するようにインバータ40を制御する短絡手段60と、直流電圧検出手段90が検出する減少する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を開放するようにインバータ40を制御する開放手段70と、直流電圧検出手段90が検出する増大する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を開放と短絡を交互に行うようにインバータ40を制御する間欠短絡手段80と、を備えた。
(もっと読む)
ブラシレスモータの駆動装置
【課題】モータ(巻線)のばらつきや温度環境などに因る通電モードの切り替えタイミングのずれを抑制でき、以って、効率の低下や脱調の発生を抑制できるブラシレスモータの駆動装置を提供する。
【解決手段】非通電相(開放相)の電圧と電圧閾値とに基づいて通電モードを順次切り替えるブラシレスモータの駆動装置において、1つの通電モードを継続させることで、ブラシレスモータを通電モードの切り替えを行う角度位置に位置決めし、その後に次の通電モードへの切り替えを行い、該通電モードの切り替え直後における非通電相の電圧を検出する。そして、検出した非通電相の電圧を、更に次の通電モードへの切り替えるときの判断に用いる電圧閾値として学習する。
(もっと読む)
単相交流同期モータ
【課題】整流波の平滑を不要とし、かつ、起動運転から同期運転への切換を安定して行うことが可能な単相交流同期モータを提供する。
【解決手段】本発明に係る単相交流同期モータは、位置センサ8の検出信号に基づいて整流電流を単相コイルL1の両方向に交互に流してモータを起動運転し、永久磁石ロータが第1の所定回転数に到達するまで回転数を上げるセンサ起動期間を有する起動運転回路1aと、永久磁石ロータの回転数が同期回転数を越えずに同期回転数付近の第2の所定回転数に到達し、位置センサ8の検出信号の立ち上がりまたは立ち下がりと交流電流のゼロクロス点とが略一致したタイミングで同期運転へ移行するように制御する制御手段5を備えている。
(もっと読む)
モータ駆動装置
【課題】 モータの明確な起動・停止信号がなく、検出したモータの回転速度を上位装置に送信し、その回転速度に応じて上位装置がモータに加速・減速指令に相当する信号を送信することでモータの回転速度を制御するモータ駆動装置において、モータが起動なのか停止なのかを明確に判断できる信号入力が存在しないため、従来技術では待機時の電力低減を行うことができない。
【解決手段】 モータ制御信号である加速・減速信号が非アクティブであり、モータ回転検出信号によりモータ停止が認識されれれば待機モードとして電流を削減する。これによりモータの起動停止信号がなく、モータ停止という明確な信号を得ることが出来ない仕様においても消費電流を低減することが可能なモータ駆動装置を実現することができる。
(もっと読む)
車両用駆動装置
【課題】小型化が可能であって精度よく磁石温度によって変化する磁石磁束を算出できる車両用駆動装置を提供する。
【解決手段】エンジン6と、永久磁石72aを内蔵したモータ7と、第1クラッチ41を介してエンジン6に連結されるとともにモータ7に連結され第1変速用シフター51により複数のギヤを選択可能な第1主軸11と、第2クラッチ42を介してエンジン6に連結され第2変速用シフター52により複数のギヤを選択可能な第2中間軸16と、を備え、モータ7の電圧、電流、インダクタンス、回転数から永久磁石72aの磁石磁束を算出して、トルク指示値を補正するECU5を備え、ECU5は、磁石磁束の算出が所定時間以上行なわれていない場合であって、且つ、モータ7の回転数が所定回転数以上又は前記モータの電圧振幅が所定振幅以上の場合に、磁石磁束の算出を行なう。
(もっと読む)
電子励起式モータ
【課題】低負荷のもとでの優れた効率と高速での大きなトルクとを同時に得ることを可能にするのを提供することである。
【解決手段】三相の巻線で成るコイルと、ロータ位置センサ(18)と速度基準信号(Vc)とに結合された入力を有しかつプロセッサ(28)の制御下で位相を進める電源回路を含む電子制御モジュールとを有するステータ−ロータアセンブリを備え、プロセッサが、相が電流パルスで供給される間に時間重複しない第1モードと、2つのコイルへ供給される出力が33%だけオーバーラップする第2モードとにおいて速度を制御するために可変のデューティレシオで位相を進め、かつ、該レシオが70%から100%の範囲の所定の値に達するときに第1から第2モードへ切換を生じさせ、かつ、前記レシオが他の所定値以下に落ちたときには第2から第1モードへ切換を生じさせるように設計されたことを特徴とする。
(もっと読む)
モータ制御部、用紙搬送制御部および用紙搬送部
【課題】モータ電流値が最適となるように進角量を調整する際、オーバーシュートを招くことなくモータの効率を向上させる。
【解決手段】モータの回転速度を設定・制御する機能を有するモータ制御部において、設定回転速度およびモータ電流量に応じた進角量データを示す進角量データテーブルを格納した記憶部を備え、モータ回転速度、モータ電流量およびモータ回転子位置をもとに、前記進角量データテーブルを参照し、前記モータ回転子位置に基づいてモータの進角量を制御するので、速度のオーバーシュートを極力回避して、モータを効率よく運転することを可能にする。進角量の増加または減少を段階的に行い、最終的に最適な進角量となるように進角制御する。
(もっと読む)
車両のモータ制御装置
【課題】車両に搭載された交流モータに流れる電流を検出する電流センサのゲイン誤差の影響を補正して、電流センサの出力に基づくモータ制御精度を向上させる。
【解決手段】交流モータ13の停止中に無効電流指令を行ったときのV相及びW相の電流指令値Iv ,Iw と電流センサ58,59の出力iv ,iw とに基づいて、電流センサ58,59のゲイン誤差の比(kv /kw )を算出するが、交流モータ13のロータ回転停止位置がIv 又はIw =0となる回転位置の場合には、交流モータ13の停止中でロック機構がロック状態のときにトルク発生電流指令を行い、このトルク発生電流指令を行ったときの電流指令値Iv ,Iw と電流センサ58,59の出力iv ,iw とに基づいて、電流センサ58,59のゲイン誤差の比(kv /kw )を算出する。このゲイン誤差の比を用いて電流センサ58,59の一方の出力を補正してゲイン誤差の不均衡を補正する。
(もっと読む)
空気調和機
【課題】空気調和機において、従来の構成では、圧縮機駆動DC電圧が変動してもモータ電流位相の進み度合いを変えていないため、最大負荷で運転可能となるようにモータ電流位相の進み幅を抑える必要があり、その結果、最大暖房能力が低減するという課題を有していた。
【解決手段】圧縮機1のブラシレスDCモータの回転数と圧縮機駆動DC電圧を検知し、モータの電流位相の進み度合いを制御することによって、冷凍サイクルの負荷に応じてモータの回転数を最大限まで高くすることが可能となり、最大暖房能力を大幅に向上させることができる。
(もっと読む)
ブラシレスモータの電気角推定方法およびブラシレスモータ
【課題】ブラシレスモータの電気角を、高分解能エンコーダを要することなく、モータの構成に不可欠な機能を利用して低コストで精度よく推定することができる電気角の推定方法および高精度に回転制御を行うことができるブラシレスモータを提供する。
【解決手段】回転子を目標回転速度で回転させるPWM駆動電圧の演算に用いる電気角を、PWM駆動電圧における周期を利用して推定する。また、回転子と、固定子と、回転子位置検知センサと、PWM駆動信号を印加する駆動回路と、回転速度検出器と、電流検出器と、制御部とを有するブラシレスモータにおいて、制御部は、前記推定方法で電気角を推定し、少なくとも回転速度検出器および電流検出器の検出結果を受けて回転子の目標回転速度に応じてPWM駆動電圧を生成するための指令信号を電気角を用いて演算し、指令信号を駆動回路に送信する。
(もっと読む)
電動機制御回路および電動機制御方法
【課題】三相モータの回転数が何らかの原因により急上昇した場合に、電動機の回転数検出値が所定値を超えるときは、回生時制御パターンによる制御によらずに、回生電力を制限する。
【解決手段】
電池100と、回生動作するインバータ12と、インバータ12を制御するコントローラ11とを備えた電動機制御回路1において、コントローラ11は、三相モータ2が所定の回転数を超えて発電するときは、インバータ12に力行時進角制御パターンを送出することを特徴とする。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】電源平滑用コンデンサを含む経路の抵抗値を検出してモータ制御を高い精度で行う。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id* 、iq* とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧Vu 、Vv 、Vw に変換する。3相電圧補正部24は、電圧センサ15で検出されたインバータ電圧値VI 、バッテリ電圧VB 、配線部のインダクタンスLに基づき、電解コンデンサ16を含む経路の抵抗値RC を求め、求めた抵抗値RC に基づき3相の指令電圧Vu 、Vv 、Vw を補正する。
(もっと読む)
圧縮機制御装置
【課題】圧縮機の回転数毎に定められた進角を圧縮機進角決定手段に記憶させて圧縮機を制御しているため、圧縮機の負荷変動に関係なく進角が決定されるので、圧縮機の負荷条件で、より最適な進角で圧縮機を制御できないという課題を有していた。
【解決手段】インバータ駆動手段温度検出手段3で検出したインバータ駆動手段2の温度と圧縮機回転数検出手段5で検出した回転数に基づいて進角を決定することによって、最適な進角で圧縮機制御を可能にすることができる。
(もっと読む)
1 - 20 / 99
[ Back to top ]