
Fターム[5H560DB20]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604) | 位置検出器と兼用するもの (847)
Fターム[5H560DB20]に分類される特許
1 - 20 / 847
電気角推定装置、モータシステム、電気角推定方法及びプログラム
モータ制御装置
車両用操舵装置
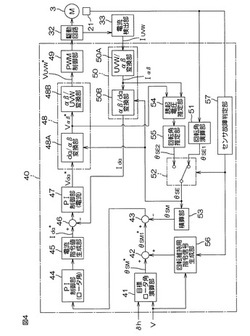
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
ブラシレスモータの制御方法

【課題】モータの公差及びモータが作動するときの負荷の公差に関わらずモータの速度を制御可能な、ブラシレスモータの制御方法を提供する。
【解決手段】本発明によるブラシレスモータを制御する方法は、複数の速度の各々の制御値を含むルックアップテーブルを記憶し、速度調整制御値を定期的に得、モータの相巻線を励起させる。速度調整制御値は、励起の位相及び長さの一方を定める。速度調整制御値を得るのに、モータの速度を測定し、測定された速度が閾値よりも大きいとき又は小さいとき、速度調整変数を定数だけ増大させ又は減少させ、測定された速度を用いて、制御値をルックアップテーブルから選択し、速度調整変数を用いて、選択された制御値を調整して、速度調整制御値を得る。本発明は、上記方法を実行する制御システム、及び、ブラシレスモータ及び制御システムを有するモータ組立体にも関する。
(もっと読む)
車両用ブラシレスモータの駆動装置
【課題】 より簡素な構成で製造コストを削減しながら、回転子の適切な位置検出によってブラシレスモータを駆動することができる車両に搭載された車両用ブラシレスモータの駆動装置を提供する。
【解決手段】 複数の固定子巻線UI、VI、WIへの電圧の供給をオン/オフするための電流調整PWM信号を生成する駆動信号生成手段54と、生成された電流調整PWM信号に応じて、各固定子巻線に電圧を供給する電圧供給手段20と、電流調整PWM信号から所定の期間TMREF1だけ位相をずらした内部PWM信号を生成する位置検出用信号生成手段55と、生成された内部PWM信号および検出された各固定子巻線に供給される電圧に応じて、回転子と各固定子巻線との相対的な位置を検出する位置検出手段55と、を備え、駆動信号生成手段54は、検出された回転子の位置に応じて、電流調整PWM信号を生成する。
(もっと読む)
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3が、低保持力の永久磁石である可変磁石を備えた可変磁束モータ3aであり、回転数に応じて可変磁石に磁化電流を供給し磁束を制御することにより、可変磁束モータ3aが所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合に、ブラシレスDCモータの運転を継続することが不可能となって脱調停止するという課題を有していた。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて、所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においてもロータ位相の変化状態に応じて出力電圧を変化させ、過負荷時にオーバーラップ通電をする際、位相の変化に対して脱調しにくい低回転時よりオーバーラップさせることにより、モータの運転状態を追従させるようにした。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置
【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
検出装置、駆動装置
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
電動車両用駆動モータ
【課題】低速回転域で所定のトルクを確保し高速回転域で逆起電力の発生を低減すると共に、低速回転域および高速回転域で電流の流れるタイミングを適正に設定できるようなシンプルな構成の電動車両用駆動モータを提供する。
【解決手段】電動車両用駆動モータは、2n個の磁極を有するマグネットを備えるロータ、ロータの各磁極に対向し周面に6m個の突起部が有するステータコア24、回転検出部、電流制御部、駆動回路を含む。ステータコア24は周方向に等間隔で形成される3m個の第1突起部群と3m個の第2突起部群とを含み、第1突起部群を構成する第1突起部36と第2突起部群を構成する第2突起部38とが交互に配置される。第1突起部36には第1コイルが巻回され、第2突起部38には第2コイルが巻回される。第2突起部群と第1突起部群とは、第2突起部38が当該第2突起部38を挟む2つの第1突起部36のうち一方に偏って配置される。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
1 - 20 / 847
[ Back to top ]