
Fターム[5H560DC11]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636)
Fターム[5H560DC11]の下位に属するFターム
Fターム[5H560DC11]に分類される特許
1 - 4 / 4
連続流式全置換型人工心臓の生理学的制御方法
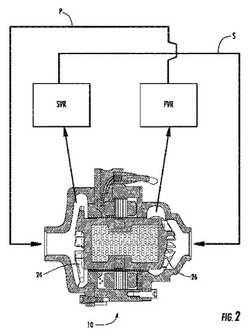
その両端に第1インペラと第2インペラを取り付けたロータに接続された電気モータを含んだポンプを制御する方法が開示されており、(a)モータを使ってロータを駆動し、第1インペラから第1流体回路、第2インペラ、第2流体回路を通して流体を循環させ、第1インペラに戻し、(b)第1モータパラメータに基づいて第1流体回路の抵抗を決定し、(c)第2モータパラメータに基づいて第1流体回路を通過する流量を決定し、(d)ポンプの少なくとも1種の運用パラメータを変化させ、第1流体回路の流量と抵抗との間に所定の関係を維持させる。 (もっと読む)
ACワイド電圧入力ファンモータ

【課題】
本発明は、商用電源のみで動作する機器においては、冷却用ファンモータとしてDCモータを使用するには、新たにDC電源を設ける必要があることから、機器が大型化してしまうと共に機器の製造コストを増大する課題があった。
【解決手段】
広範囲な全世界商用電源に対応したAC電源の電圧仕様を入力電源に使用して、整流素子、スイッチング素子等で構成する電力変換装置で、出力はDCで、且つ、一定電圧出力の駆動回路をフアンモータ内部にコンパクトに収納することで構成する。
その結果、広範囲な全世界商用電源に差し込むだけで、一定回転数で駆動可能にするDCモータの駆動装置と、その他の機能をファンモータの内部にコンパクトに収納したファンモータを提供することで課題を解決する手段とする。
(もっと読む)
同期電動機の駆動システム及び同期電動機の駆動方法
【課題】 温度変化の大きな巻線抵抗値に依存せず、永久磁石同期電動機の高精度の位置センサレス制御を実現する。
【解決手段】 同期電動機に印加する電圧及び検出電流値から、瞬時無効電力実際値Qを演算する。一方、インバータの出力角周波数ω1及び検出電流値から、瞬時無効電力推定値Qhatを演算する。これらの偏差ΔQをゼロにするように、インバータの出力角周波数ω1を調整する。この偏差ΔQは、巻線抵抗値に関係なく、同期電動機の軸誤差Δθに比例する成分と、その変化率dΔθ/dtに比例する成分から成立つ。したがって、これをゼロに近づける周波数制御系によって、高精度のセンサレス制御を実現した。
なお、瞬時無効電力でなくても、巻線抵抗値を用いず演算でき、軸誤差Δθの関数を含む任意の値を演算に用いることもできる。
(もっと読む)
電動機駆動装置
【課題】電源事情に依存せず必要な電動機出力を安定して得ること。
【解決手段】電動機駆動装置3は、電動機4の固定子巻線に流れる電流を検出する電流検出部9と、目標速度ω*と電動機4の回転速度ω1との速度誤差から電流指令値I*を
作成する速度制御部11と、電流指令値I*と検出された電流値との電流誤差から電圧指令値v*を作成する電流制御部12と、電圧指令値v*から電圧飽和の度合いである電圧飽和率を算出する電圧飽和率算出手段17と、電圧飽和率の算出値に基づいて予め設定された電流指令位相を補正する位相補正手段16とを備える。この位相補正手段16により、電源電圧が低下した場合は電流指令位相を大きくして弱め界磁制御を効かせる方向に作用させることで、電源事情に依存せず必要な電動機出力を安定して得ることができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]