
Fターム[5H560DC13]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 電気的変量を検出するもの (2,636) | 電圧 (880)
Fターム[5H560DC13]に分類される特許
1 - 20 / 880
モータ駆動制御装置及び集積回路装置
電気自動車のモータ制御装置
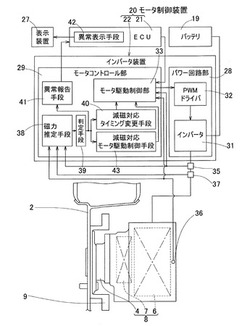
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
ブラシレスモータの制御方法

【課題】モータの公差及びモータが作動するときの負荷の公差に関わらずモータの速度を制御可能な、ブラシレスモータの制御方法を提供する。
【解決手段】本発明によるブラシレスモータを制御する方法は、複数の速度の各々の制御値を含むルックアップテーブルを記憶し、速度調整制御値を定期的に得、モータの相巻線を励起させる。速度調整制御値は、励起の位相及び長さの一方を定める。速度調整制御値を得るのに、モータの速度を測定し、測定された速度が閾値よりも大きいとき又は小さいとき、速度調整変数を定数だけ増大させ又は減少させ、測定された速度を用いて、制御値をルックアップテーブルから選択し、速度調整変数を用いて、選択された制御値を調整して、速度調整制御値を得る。本発明は、上記方法を実行する制御システム、及び、ブラシレスモータ及び制御システムを有するモータ組立体にも関する。
(もっと読む)
モータ駆動装置
【課題】直流電源から電力供給を受けるモータ駆動装置において、1パルス制御の実行中に、直流電源に流れる電流に含まれるリップルを抑制することのできるモータ駆動装置を提供することを目的とする。
【解決手段】直流電源3から直流母線を介して入力される直流電力を三相交流電力に変換してIPMモータ8に出力するインバータ2と、電気角1周期の間に、各相に対応するスイッチング素子に対して正負1パルスの矩形波電圧をゲート駆動信号として印加する1パルス制御モードを有するインバータ制御装置10とを備え、インバータ制御装置10は、1パルス制御モードを実行する場合に、矩形波電圧の立ち上がり時および立ち下がり時において、所定の位相角幅でデューティを徐々に増加または減少させるモータ駆動装置1を提供する。
(もっと読む)
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
モータ駆動装置およびモータおよびそれを搭載した空気調整機
【課題】モータ運転停止時は、制御電源からモータ駆動装置への電力供給量を低減して待機時の消費電力を抑える。
【解決手段】主電源からモータの複数相の駆動巻線へ電力供給するインバータ部と、制御電源を電力源とし、外部との信号入出力端子の一つとして前記駆動巻線への電力供給値を意味する制御信号入力端子を備え、前記インバータ部へPWM信号を前記制御信号に基づいて発生する制御部を備えたモータ駆動装置であって、
前記制御部は、前記制御信号が前記駆動巻線への電力供給値ゼロを意味している場合には、前記PWM信号発生に関る内部構成部分を機能停止するよう作用して内部消費電力を低減し、前記制御電源から制御部への電力供給量を前記内部構成部分機能動作中に比べ小さくする構成とした。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
モータ制御装置
【課題】3相分のモータコイルの誘起電圧の検出信号を絶縁して制御部に出力する際に、絶縁素子(フォトカプラ)の個数を3個から1個に減らす。
【解決手段】本発明のモータ制御装置10では、3相ブラシレスモータ1を惰性で回転させるフリーラン状態とし、高電圧系の回路(電圧比較回路21と波形合成回路22等)において、U、V、W相のモータコイルに発生する誘起電圧を各相ごとにそれぞれ検出(例えば、ゼロクロス点の発生タイミングを検出)し、この3相分の検出信号を低電圧系の制御回路(制御部30)に出力する際に、高電圧系の回路において、上記3相分の検出信号を基に、各相の検出信号に含まれるそれぞれの検出情報(例えば、ゼロクロス点の発生タイミングの情報)を含む1つの信号を合成し、この合成された信号を1つの絶縁素子(フォトカプラPC1)を介して、低電圧系の制御回路(制御部30)に出力する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
ブラシレスファンモータの駆動装置、及び始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ駆動装置
【課題】モータ性能を向上するモータ駆動装置を提供することにある。
【解決手段】モータ駆動装置100は、モータを駆動するモータ駆動信号を生成する駆動信号生成部120と、この駆動信号生成部120の前段に設けられ、プルアップ動作時、駆動信号生成部120のスイッチがオン/オフする時発生される電磁波妨害によって引き起こされるモータの振動またはノイズを防止するように、駆動信号生成部120の電流を調節する電流制御部110と、駆動信号生成部120から出力されるモータ駆動信号に基づいてモータを駆動する駆動部130とを含む。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、並びにブラシレスファンモータの駆動装置及び制御方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
ブラシレスモータの駆動装置、ブラシレスモータの始動方法、ブラシレスファンモータの駆動装置、及びブラシレスファンモータの始動方法
【課題】簡単な方法で短時間にモータを始動させ、かつ始動時に大きいトルクが得られるようにする。
【解決手段】ブラシレスモータを始動するときは、時間t1からt2の間でロータの停止位置を検出したら、ロータの停止位置に応じた始動励磁パターンを初期通電時間Ts1だけ入力する。その後、通電を停止すると、フリーラン中のロータの回転位置に応じて励磁切り替えタイミング信号に複数の信号SL1,SL2,SL3,SL4が順次発生する。
これら信号SL1〜SL4の中から、2つ目以降の信号SL2〜SL4を使ってロータ位置を検出し、通常の通電切り替え制御に移行する。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
1 - 20 / 880
[ Back to top ]