
Fターム[5H560RR10]の内容
無整流子電動機の制御 (40,007) | 目的・対策 (1,913) | その他 (988)
Fターム[5H560RR10]に分類される特許
1 - 20 / 988
電気角推定装置、モータシステム、電気角推定方法及びプログラム
半導体装置
画像形成装置
モータ駆動制御装置及び集積回路装置
電動工具
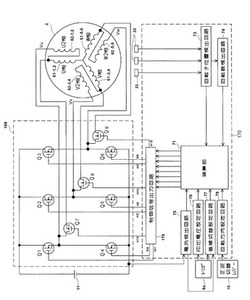
【課題】巻線仕様を変更して2種類以上のモータ特性を得るモータを備える場合に、各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行うことで、切替えた瞬間に生じる急激なトルク変化や回転数変化を回避する。
【解決手段】永久磁石回転子と、固定子4と、固定子の各ティース毎に2つのコイルを持つ巻線を有するモータと、これによって駆動される先端工具と、前記巻線へ駆動電力を供給するインバータ回路169と、これを制御する制御部170と、前記モータの起動及び回転の制御を行うためのスイッチとを備え、前記巻線は前記ティース毎に2つのコイルを有することで、2種の巻線仕様を有するものであり、制御部170は、前記モータに流れる電流に応じて2つのコイルへの通電を変化させることにより各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行う。
(もっと読む)
車両用操舵装置

【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
H型ブリッジ回路およびモータ駆動装置
【課題】モータに適用した場合に、回転効率を犠牲にすることなく、逆流電流の発生を防止できるようにしたH型ブリッジ回路などの提供。
【解決手段】この発明は、MOSトランジスタTr1〜Tr4からなるH型ブリッジ1と、電流モニタ回路2、3と、制御回路4とを備える。電流モニタ回路2、3のそれぞれは、コイル5に流れる電流を検出し、この検出に応じた信号を電流判定信号MONI1、電流判定信号MONI2として出力する。制御回路4は、コイル5の通電方向を切り換える切換信号HALLと、電流モニタ回路2、3から出力される電流判定信号MONI1、MONI2とを基に、制御信号PG1、PG2、NG1、NG2を生成し、MOSトランジスタTr1、Tr2をオンオフ制御する。
(もっと読む)
モータの制御装置
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行えるモータの制御装置を提供する。
【解決手段】 モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設ける。温度センサSaで検出される温度Tcに対し複数の閾値が設定され、各閾値で区分される温度領域毎に、互いに異なる電流制限条件が設定され、検出される温度Tcの含まれる前記温度領域の前記電流制限条件に応じてモータ6の電流値を制限するモータ電流制限手段95を設けた。
(もっと読む)
電気自動車のモータ制御装置
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置
【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
電動オイルポンプ装置
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
電気掃除機
【課題】応答性の高いインバータにより吸込み圧力を制御することにより、作業性の高い掃除機を実現すること。
【解決手段】交流電源1より与えられる交流電力は直流に変換された後、インバータ回路4に入力され任意の周波数の3相交流に変換され、接続されたモータ5およびファン6を任意の回転数で駆動する。電流制御手段9は、モータ5に流れる電流を所望の電流値になるように制御する。さらに圧力制御手段10は、掃除機の吸込み圧力を検出する圧力センサ8の検出値を外部より与えられる目標圧力指示値になるようにモータ5に流れる電流値の目標値を設定することにより、モータ5に流れる電流を制御することによって、掃除機の吸込み圧力を掃除作業性に最適な圧力値に制御することができる。
(もっと読む)
モータ駆動装置
【課題】本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【解決手段】本発明は、ホール(Hall)センサーの検出信号によって、PWM信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によってモータ駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
駆動装置
【課題】モータの動作可能領域のうち非昇圧領域が狭くなるのを抑制する。
【解決手段】コンデンサの電荷を放電させる所定放電処理を実行したときの電流積算値Icと放電開始前電圧VHstartと放電終了後電圧VHendとを用いてコンデンサの容量Cvhを計算し、計算したコンデンサの容量Cvhに応じて共振領域の下限回転数Nrfminおよび上限回転数Nrfmaxを設定し、設定した共振領域の下限回転数Nrfminおよび上限回転数Nrfmaxを用いて共振領域が昇圧領域に含まれるよう昇圧領域と非昇圧領域とを区分する昇圧/非昇圧ラインを設定する。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
モータ制御装置
【課題】起動時間の短縮化が図れるモータ制御装置を提供する。
【解決手段】マイクロコンピュータ11は、速度比率指令値演算部21と、第1スイッチ22と、速度比率偏差演算部23と、速度制御部24と、電流比率指令値演算部25と、第2スイッチ26と、電流比率偏差演算部27と、q軸電流制御部28と、起動制御部43とを含んでいる。速度比率指令値演算部21は、予め設定されたロータの回転速度の最大値に対する速度指令値ω*の比率を、速度比率指令値として演算する。起動時には、第1スイッチ22は、速度比率指令値を第2スイッチ26に入力させ、第2スイッチ26は、第1スイッチ22から入力する速度比率指令値を、q軸電流比率指令値として電流比率偏差演算部27に入力させる。
(もっと読む)
1 - 20 / 988
[ Back to top ]