
Fターム[5H560SS02]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289) | 電池、バッテリ (747)
Fターム[5H560SS02]に分類される特許
1 - 20 / 747
車両用操舵装置
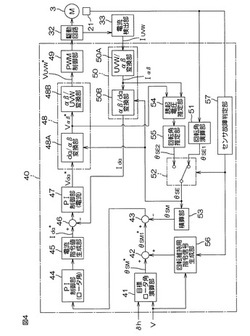
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用ブラシレスモータの駆動装置

【課題】 より簡素な構成で製造コストを削減しながら、回転子の適切な位置検出によってブラシレスモータを駆動することができる車両に搭載された車両用ブラシレスモータの駆動装置を提供する。
【解決手段】 複数の固定子巻線UI、VI、WIへの電圧の供給をオン/オフするための電流調整PWM信号を生成する駆動信号生成手段54と、生成された電流調整PWM信号に応じて、各固定子巻線に電圧を供給する電圧供給手段20と、電流調整PWM信号から所定の期間TMREF1だけ位相をずらした内部PWM信号を生成する位置検出用信号生成手段55と、生成された内部PWM信号および検出された各固定子巻線に供給される電圧に応じて、回転子と各固定子巻線との相対的な位置を検出する位置検出手段55と、を備え、駆動信号生成手段54は、検出された回転子の位置に応じて、電流調整PWM信号を生成する。
(もっと読む)
電気自動車のモータ制御装置
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
ブラシレス発電電動機の制御装置
【課題】スイッチング回数を減らしても電圧昇圧機能を実現しつつ良好な回転数特性が得られ、冷却簡素で、ノイズ対策も簡素な電源電圧昇圧機能併用の電動機駆動方法の提供。
【解決手段】前記星型多相巻線の中性点と前記多相インバータの直流負極間に直流電源を接続し、前記インバータのスイッチ素子を、いわゆる矩形波導通で駆動する際に、前記インバータのハイサイドスイッチがオフの期間に、該ハイサイドスイッチに直列に接続されたローサイドのスイッチをPWMスイッチング制御するものにおいて、前記ハイサイドスイッチがオフになった時点を基点として、ローサイドスイッチのスイッチング開始時点をα、スイッチング終了時点をβと定義すると、β―α≧120度(電気角度)、α>0度、β<180度であることを特徴とする発電電動機の制御装置、及びシステム。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
始動発電機の制御装置
【課題】エンジン10の始動に際しての初期回転の付与手段として発電機(始動発電機40)を併用するに際し、始動発電機40によって生成可能なトルクが小さいために、エンジン10の始動性等が低下すること。
【解決手段】リレー48は、バッテリ46の正極端子を、インバータINVの正極側入力端子と始動発電機40の中性点Nとのいずれかに選択的に接続する。エンジン10の始動に際しては、バッテリ46の正極を中性点Nに接続してインバータINVの入力電圧を昇圧し、インバータINVの入力電圧がバッテリ46の端子電圧Vbであるときよりも生成可能なトルクを増大させる。これにより、始動性を向上させたり、燃料カット制御からの復帰回転速度を低下させて燃費を改善したりすることができる。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
モータ制御装置
【課題】起動時間の短縮化が図れるモータ制御装置を提供する。
【解決手段】マイクロコンピュータ11は、速度比率指令値演算部21と、第1スイッチ22と、速度比率偏差演算部23と、速度制御部24と、電流比率指令値演算部25と、第2スイッチ26と、電流比率偏差演算部27と、q軸電流制御部28と、起動制御部43とを含んでいる。速度比率指令値演算部21は、予め設定されたロータの回転速度の最大値に対する速度指令値ω*の比率を、速度比率指令値として演算する。起動時には、第1スイッチ22は、速度比率指令値を第2スイッチ26に入力させ、第2スイッチ26は、第1スイッチ22から入力する速度比率指令値を、q軸電流比率指令値として電流比率偏差演算部27に入力させる。
(もっと読む)
モータ制御装置
【課題】3相分のモータコイルの誘起電圧の検出信号を絶縁して制御部に出力する際に、絶縁素子(フォトカプラ)の個数を3個から1個に減らす。
【解決手段】本発明のモータ制御装置10では、3相ブラシレスモータ1を惰性で回転させるフリーラン状態とし、高電圧系の回路(電圧比較回路21と波形合成回路22等)において、U、V、W相のモータコイルに発生する誘起電圧を各相ごとにそれぞれ検出(例えば、ゼロクロス点の発生タイミングを検出)し、この3相分の検出信号を低電圧系の制御回路(制御部30)に出力する際に、高電圧系の回路において、上記3相分の検出信号を基に、各相の検出信号に含まれるそれぞれの検出情報(例えば、ゼロクロス点の発生タイミングの情報)を含む1つの信号を合成し、この合成された信号を1つの絶縁素子(フォトカプラPC1)を介して、低電圧系の制御回路(制御部30)に出力する。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
内接ギアポンプユニット
【課題】よりシンプルな構成にて、誘起電圧検出手段からの検出信号に基づいて、より低い回転数までより効率良く電動モータを回転駆動することができる内接ギアポンプユニットを提供する。
【解決手段】インナギア31とアウタギア32と電動モータとモータ制御手段60とを備え、電動モータは1組または複数組のN極とS極の磁極を有するロータ33と磁極と同数組のコイル34U、34Wとにて構成された2相モータである。モータ制御手段は、通電手段64U、64Wと誘起電圧検出手段65U、65Wとをそれぞれのコイルに対して備えており、一方の誘起電圧検出手段の検出信号を反転させる信号反転手段66Wと、信号反転手段の出力信号と他方の誘起電圧検出手段の検出信号とを重畳する信号重畳手段67とを備え、コイルへの非通電時における信号重畳手段からの出力信号に基づいて検出したコイルに対するロータの回転角度に基づいてコイルへの通電を制御する。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、発熱を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出する場合、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるよう3相のPWM信号パターンを生成する。電流判定手段は、検出された3相電流の大小関係を判定し、PWM信号生成手段は、3相間のPWMデューティ比を維持した状態で、検出された3相電流のうち最大相の通電期間をゼロ又は最小とするようPWM信号パターンを補正する。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
1 - 20 / 747
[ Back to top ]