
Fターム[5H560UA01]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 半導体素子 (1,954)
Fターム[5H560UA01]の下位に属するFターム
Fターム[5H560UA01]に分類される特許
1 - 20 / 81
車両用操舵装置
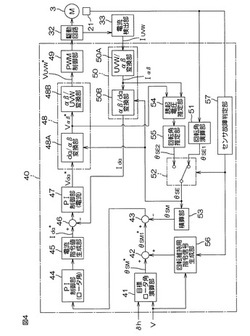
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
モータ制御装置、モータ制御方法

【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動車両の制御装置
【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
モータ制御装置
【課題】電源電流指令値に基づいてブラシレスモータを電流制御で駆動する場合に、外乱に対するロバスト性を向上させることができるモータ制御装置を提供する。
【解決手段】q軸電流指令値演算手段21,22は、ロータが電気角で360°回転する毎に、電源電流検出値IPと電源電流指令値IP*との偏差に基づいてq軸電流指令値Iq*を演算する。そして、電圧指令値演算手段23,24,26,27は、所定の演算周期Ts毎に、q軸電流指令値演算手段21,22によって決定されたq軸電流指令値Iq*とq軸電流検出値Iqとの偏差および所定のd軸電流指令値Id*とq軸電流検出値Idとの偏差に基づいて、q軸電圧指令値Vq*およびd軸電圧指令値Vd*とを演算する。この電圧指令値Vq*,Vd*に基づいてモータ1が駆動される。
(もっと読む)
ファンモータの駆動装置およびそれを用いた冷却装置、電子機器
【課題】ファンモータの駆動回路の小型化にある。
【解決手段】3相ブラシレス直流モータであるファンモータ6を駆動する駆動装置100が提供される。内蔵ホール素子9は、ファンモータ6に近接して配置され、ファンモータ6のロータの位置に応じたホール信号のペアを生成する。内部電源21は、内蔵ホール素子9にバイアス信号を供給する。ホール信号処理部11は、ホール信号のペアのオフセットをキャンセルするとともに、ホール信号を増幅する。駆動処理回路13は、ホール信号処理部11の出力信号にもとづきファンモータ6を駆動する。駆動装置100は、ひとつの半導体基板に一体集積化される。
(もっと読む)
モータ駆動装置、モータ装置及びモータの駆動方法
【課題】従来に比して一段と確実に過負荷による駆動段パワー素子の破壊を防止することができるモータ駆動装置、モータ装置及びモータの駆動方法を提案する。
【解決手段】モータの駆動電流値と電流制限値との比較結果による駆動信号の制御により、駆動電流値が電流制限値に立ち上がると駆動電流の供給を停止し、駆動電流値の電流制限値への立ち上がりによる駆動信号の制御により、駆動電流値が電流制限値に立ち上がる場合には、一定の時間間隔で駆動信号の供給を停止するようにして、駆動電流値が電流制限値に立ち上がる頻度に応じて駆動信号の供給を停止する期間を増減する。
(もっと読む)
永久磁石同期電動機の制御装置
【課題】高周波電圧を印加することにより高周波電流を流して磁極位置を推定する構成において、高周波電流の検出誤差の影響を受けにくい永久磁石同期電動機の制御装置を提供する。
【解決手段】実施形態によれば、印加する高周波電圧の半周期を電流検出周期のN倍(N=1、2、…)となるように選択し、その高周波電圧の位相を(2π)÷(2N)を単位とする離散的な位相として取り扱い、この離散的な位相の正弦波状関数の電圧成分をD軸電圧に重畳する。離散的な位相の余弦波状関数の極性反転信号を、検出したD軸電流およびQ軸電流のうち少なくともQ軸電流に乗算し、その乗算値を高周波電圧のM周期(M=1、2、…)にわたり加算して、推定磁極位置の誤差情報を含む位置誤差抽出量を演算する。位置誤差抽出量に基づいて推定磁極位置の誤差を打ち消すように出力周波数を収束演算する。
(もっと読む)
モータ制御装置
【課題】異常が発生した場合においても安定したモータ駆動を続けることができるモータ制御装置を低コストで提供する。
【解決手段】モータ制御装置1の各相に電流遮断回路23、38を設ける。プリドライバ回路12〜14のスイッチ素子20、21、35、36のいずれかに外乱が印加され、接合破壊のために短絡故障して大電流が流れたときに、電流遮断回路23、38によって故障したプリドライバ回路12、13または14に流れる電流を遮断し、電源電圧の低下を防ぐ。
(もっと読む)
電動機駆動装置
【課題】インバータをスイッチング制御する際のノイズの発生の低減と素子の温度上昇の抑制とを両立させる。
【解決手段】インバータのPWM制御に用いるキャリアの周波数(キャリア周波数F)を、モータの電気角θeが電気角周期Tの1/4周期進む度に(ステップS120)、高周波数範囲内からランダムに抽出した高周波数の設定と低周波数範囲内からランダムに抽出した低周波数の設定とに交互に切り替える(ステップS150〜S170)。これにより、モータMGの電気信号(変調波)の山や谷(T/2周期)に対して高周波数の設定期間と低周波数の設定期間とを同期間割り当てることができ、特定のトランジスタに対して熱集中が生じるのを抑制することができる。また、キャリア周波数Fを拡散させるから、ノイズの発生を低減することができる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】d軸電流を同期起動制御に用いることなく、d軸電流を用いた同期起動制御からセンサレス制御に切り替えるときに生じる急加速や急減速等による振動、騒音を低減するとともに、電流の跳ね上がり等制御及び動作の不安定を回避する。
【解決手段】ブラシレスDCモータ1の制御装置2であって、前記モータ1の同期始動制御をq軸電流を用いて行うとともに、前記同期始動制御からセンサレス制御に移行する際に、前記モータ1の回転速度として位置推定器が前記q軸電流から算出した推定速度を用いて行うことを特徴とする。
(もっと読む)
ブラシレスDCモータの制御装置およびそれを用いた送風装置
【課題】ブラシレスDCモータの磁束量ばらつきによるモータ出力ばらつきを抑制することができるブラシレスDCモータの制御装置を提供する。
【解決手段】インバータ回路9、ブラシレスDCモータの回転数を検出する回転数検出手段10、ブラシレスDCモータへの印加電圧を検出する印加電圧検出手段11、ブラシレスDCモータが所望の出力となるように検出した誘起電圧と回転数に基づいてインバータ回路9を制御する出力制御手段12、ブラシレスDCモータの回転数検出と同時に誘起電圧と電気角を検出し、誘起電圧と電気角の検出結果に応じて、出力制御手段12に予め記憶した基準となる印加電圧あるいは印加電圧に比例関係のあるデューティの制御パラメータを変更して、ブラシレスDCモータの磁束量のばらつきを補正する補正手段13を備える。
(もっと読む)
ブラシレスDCモータの制御装置およびそれを用いた送風装置
【課題】ブラシレスDCモータの磁束量ばらつきによるモータ出力ばらつきを抑制することができるブラシレスDCモータの制御装置を提供する。
【解決手段】インバータ回路9、ブラシレスDCモータの回転数を検出する回転数検出手段10、ブラシレスDCモータに供給する電流を検出する電流検出手段11、ブラシレスDCモータが所望の出力となるように検出した回転数と電流を制御する出力制御手段12、ブラシレスDCモータの回転数検出と同時に誘起電圧と電気角を検出し、誘起電圧と電気角の検出結果に応じて、出力制御手段12に予め記憶した基準となる電流の制御パラメータを変更して、ブラシレスDCモータの磁束量のばらつきを補正する補正手段14を備える。
(もっと読む)
電流検出装置及びモータ制御装置
【課題】PWMインバータの出力電流を検出するのに、その検出電流に含まれる検出誤差を低減できる電流検出装置を提供する。
【解決手段】三角波パルス幅変調を用いた多相インバータの出力電流を検出する電流検出装置であって、あらかじめ設定した一定期間中の複数の特定のタイミング毎に電流を検出する電流検出手段111と、一定期間中の複数の特定のタイミング毎の電流検出値を加算する加算手段113u,113wとを備え、電流検出手段は、一定期間中の複数の特定のタイミングとして、三角波PWMの搬送波の上り側と下り側との両方でそれぞれ少なくとも1回ずつ電流検出を行うことを特徴とする。
(もっと読む)
電気機械の制御方法
【課題】電気機械の効率を向上させること。
【解決手段】電気機械を制御する方法が提供され、本方法は、電気機械の相巻線を供給電圧によって励起する段階と、相巻線の電流が閾値を上回ったときに相巻線をフリーホイールする段階と、を含む。次いで、閾値は、供給電圧及び/又は電気機械の速度のうちの少なくとも1つの変化に応答して調整される。加えて、本方法を実施する制御システム、並びに制御システムを備えた電気機械を提供する。
(もっと読む)
モータ制御装置
【課題】ゼロ速度から高速度回転までのモータ運転中において、モータの層間短落および位置センサ部の誤差増大等の中間レベルのモータ異常を検知できるモータ制御装置を得ること。
【解決手段】モータ制御装置100は、モータ310に出力される出力電流の電流値を検知して目標トルクに応じた電流値に制御するモータ制御装置100であって、モータ310の運転中にモータ310に出力される出力電流の電流値と出力電圧の電圧値に基づいてモータ運転状態値を演算し、その演算されたモータ運転状態値に基づいてモータ310に異常が発生しているか否かを判定するモータ異常判定部140を有する。
(もっと読む)
ブラシレスモータ制御装置及びブラシレスモータシステム
【課題】ブラシレスモータが停止したにも拘わらず、あたかもブラシレスモータが駆動しているように誤った認識をして、所望の制御が得られなくなることを防止できるブラシレスモータ制御装置及びブラシレスモータシステムを提供することにある。
【解決手段】ブラシレスモータ制御手段302は、上位制御装置12からの制御指令に応じて、ブラシレスモータ4に印加する電圧指令を演算する。軸誤差演算手段306は、ブラシレスモータ制御手段302が出力する電圧指令と、座標変換手段303により求められた電流値と、ブラシレスモータの制御上の回転速度を用いて、回転座標軸であるd−q軸とdc−qc軸との軸誤差を推定演算する。異常検出手段308は、軸誤差演算手段306により求められた軸誤差に基づいて、ブラシレスモータを異常と判定する。
(もっと読む)
1 - 20 / 81
[ Back to top ]