
Fターム[5H560XA01]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | フィードバック制御 (2,621)
Fターム[5H560XA01]の下位に属するFターム
電流フィードバック (1,370)
電圧フィードバック (234)
速度フィードバック (656)
位置フィードバック(位置決め) (219)
位相制御(PLL) (123)
Fターム[5H560XA01]に分類される特許
1 - 19 / 19
モータ駆動装置及びモータの駆動制御方法
【課題】安価な回路構成で一般的な制御方法による起動を行うとともに、エラー発生時には適切なリカバリー動作を実現する。
【解決手段】モータの駆動開始時には、第1の駆動手段によってモータを駆動した後、第2の駆動手段によってモータを駆動するように、第1の駆動手段と第2の駆動手段とを切り替える制御手段と、を有し、第1の駆動手段は、所定の駆動周波数でオープンループ制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の駆動周波数よりも低い駆動周波数でモータを駆動し、第2の駆動手段は、所定の加速度でフィードバック制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の加速度よりも低い加速度でモータを駆動する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置

【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
車両操舵装置用電動モータユニットの製造方法
【課題】電動モータのゼロ点位置とセンサのゼロ点位置との間のオフセット値を容易に求めることのできる車両操舵装置用電動モータユニットの製造方法を提供する。
【解決手段】伝達比制御モータのロータのゼロ点位置と第1レゾルバのゼロ点位置との間のオフセット値A1を設定するようになっている。具体的には、第1レゾルバを用いたフィードバック制御により、伝達比制御モータが定格出力を発生するように伝達比制御モータを駆動させる(ステップS5)。このとき、伝達比制御モータが定格出力で回転しないときには(ステップS6でNO)、オフセット値A1を変更する(ステップS8)。一方、伝達比制御モータが定格出力で回転したとき(ステップS6でYES)には、オフセット値A1の設定を完了する。
(もっと読む)
制御定数の決定方法及び電動機制御装置
【課題】矩形波制御のトルクリップルへの対応を考慮するとともに、電動機のトルクフィードバック制御系の安定性及び応答性を考慮した、制御定数の決定方法を提供する。
【解決手段】トルクフィードバック制御器は、トルク指令値に対する、ローパスフィルタの処理を行った電動機の出力トルクのトルク偏差を算出し、比例積分制御を行って電圧位相を算出する制御器であり、電圧位相の変化に対する出力トルクの傾きであるトルク位相傾きを電動機の伝達関数と決定するステップと、一巡伝達関数のゲイン余裕及び位相余裕が確保されるような積分ゲインの第一の決定条件を導出するステップと、閉ループ伝達関数の応答性が、所定の応答性以上に速くなるような積分ゲインの第二の決定条件を導出するステップと、積分ゲインを、第一の決定条件及び第二の決定条件の双方を満たすように決定するステップと、を備える。
(もっと読む)
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。指示電流値生成部30は、指示操舵トルクT*と検出操舵トルクTに基づいてγ軸指示電流値Iγ*を設定する。指示電流値生成部30は、指示電流増減量演算部30Aと加算器30Bとを含んでいる。指示電流増減量演算部30Aは、指示操舵トルクT*の符号と、検出操舵トルクTと指示操舵トルクT*との偏差ΔT(=T−T*)とに基づいて、指示電流値Iγ*に対する電流増減量ΔIγ*を演算する。指示電流増減量演算部30Aによって演算された電流増減量ΔIγ*は、加算器30Bにおいて、指示電流値Iγ*の前回値Iγ*(n-1)に加算される。これにより、今演算周期での指示電流値Iγ*が演算される。
(もっと読む)
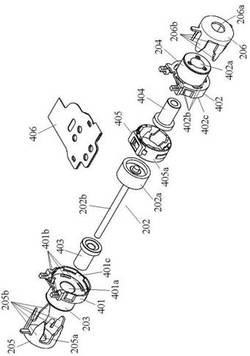
ロータ位置予測および補間の機能を有する電子整流モータおよび方法
本発明はステータと特に永久磁石式のロータとを備えた電子整流モータに関する。この電気モータは制御ユニットを有し、制御ユニットはステータと作用結合しており、ステータがロータを回転させる回転磁界を発生させることができるように、ステータを整流する制御信号を生成する。電気モータはさらにロータの位置、特に角度位置を検出し、ロータ位置を表すロータ位置信号を生成する少なくとも1つのロータ位置センサを有する。制御ユニットはロータ位置信号に依存して制御信号を生成する。本発明によれば、制御ユニットはロータ位置信号をサンプリングおよび量子化し、サンプリングされ量子化されたロータ位置信号に対応する時間的なデータストリームを形成するデジタルロータ位置信号を生成する。制御ユニットは時間的に連続する2つのロータ位置値の間にある少なくとも1つの中間値をデジタルロータ位置信号内に形成する補間器を有する。 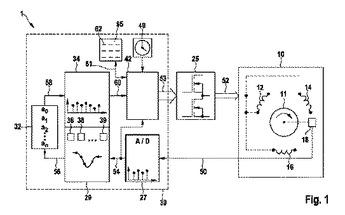 (もっと読む)
(もっと読む)
小型FPGAベース・デジタル型モータコントローラ、その設計構造および提供方法
【課題】ソフトウェアに依存しないモータコントローラ102を提供する。
【解決手段】小型FPGAベース・デジタル型モータコントローラ102は、DCブラシレスモータ108の位置情報を提供する1つあるいは複数のセンサ104からセンサデータを受け取り、調整後のセンサデータを生成するように構成されたセンサインタフェース206と、DCブラシレスモータ108のコミュテーションを制御する切換コマンドを生成するように構成され、センサインタフェース206からの調整後のセンサデータからコミュテーションパルスを生成するコミュテーション制御部210と、コミュテーション制御部210からコミュテーションパルスを受け取り、リニアフィードバック制御パラメータを提供するためにコミュテーションパルスをDCブラシレスモータ108の回転速度に変換するように構成されたタイムインバータ208と、を備える。
(もっと読む)
連続流式全置換型人工心臓の生理学的制御方法
その両端に第1インペラと第2インペラを取り付けたロータに接続された電気モータを含んだポンプを制御する方法が開示されており、(a)モータを使ってロータを駆動し、第1インペラから第1流体回路、第2インペラ、第2流体回路を通して流体を循環させ、第1インペラに戻し、(b)第1モータパラメータに基づいて第1流体回路の抵抗を決定し、(c)第2モータパラメータに基づいて第1流体回路を通過する流量を決定し、(d)ポンプの少なくとも1種の運用パラメータを変化させ、第1流体回路の流量と抵抗との間に所定の関係を維持させる。 (もっと読む)
モータ制御装置および電気式動力舵取装置
【課題】モータトルクのばらつきを抑制し得るモータ制御装置および電気式動力舵取装置を提供する。
【解決手段】モータ30には、ステータ31の各ステータティース31bのうち、周方向中心線Lu,Lv,Lw上であって電気角で120度間隔に当該周方向中心線Lu,Lv,Lwに沿う3方向の3相磁力φu,φv,φwを検出可能な3つの磁気センサ33u,33v,33wが設けられている。これら3つの磁気センサ33u,33v,33wにより、ロータ32が発生するロータ磁力φfaやステータ磁力φdi,φqiを含むように3方向の磁力φu,φv,φwが検出されるので、これらロータ磁力φfaおよびステータ磁力φdi,φqiに基づいて実際にモータ30が出力するモータトルクTqが求められる。ECU40は、このモータトルクTqとトルク指令値Tq*とに応じた電圧をステータ31の各コイルに供給してモータ30を制御する。
(もっと読む)
操舵制御装置
【課題】モータのロック位置によって各相のスイッチング素子への通電量が大きく変わる場合でも、推定温度の最大値に基づいて適切な過熱保護を行えるようにした操舵制御装置を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、アシストトルク付与のためのブラシレスモータ18と、アシストトルク指令値を求めるアシストトルク算出部26と、スイッチング回路を含むモータ駆動部30と、モータ18の相電流を検出する電流センサ31と、過熱保護演算部25とを備える。過熱保護演算部25では、電流センサ31からの相電流値の絶対値の最大値に基づいてモータ18の温度変化量を推定する。その温度変化量に応じたトルク補正量を算出し、このトルク補正量をもってアシストトルク指令値を補正する。
(もっと読む)
回転電機制御システム
【課題】回転電機において、コイルおよび永久磁石の過熱を防止する制御を行うことである。
【解決手段】回転電機制御システム10は、電源回路12と、回転電機14と、電源回路12に含まれるインバータ24の作動を制御するインバータECU40と、これらの各構成要素の作動を全体として制御する制御部50を含んで構成される。制御部50に接続される記憶部44には、コイル温度TCと磁石温度TMとの間の温度差に関する温度差マップ46と、キャリア周波数fと制限開始温度T0に関する制限開始温度マップ48が記憶され、制御部50は、これらのマップを用いて、キャリア周波数fとコイル温度TCとに基き、回転電機14の出力制限を行う出力制限モジュール52を含んで構成される。
(もっと読む)
モータ制御装置およびそれを備えた車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。このとき、ロータ角θMに従う回転座標系であるdq座標のq軸電流はIγ・sinθLとなる。したがって、負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。これにより、指示操舵トルクT*が得られるように負荷角θLが変化する。
(もっと読む)
車両の制御装置および制御方法
【課題】蓄電装置の電力を昇圧して出力するコンバータと、コンバータから出力される電力を変換して車両駆動用モータに出力するインバータとを備えた車両において、コンバータの出力電圧を増加させる際に、指令値どおりのトルクをモータに出力させる。
【解決手段】矩形電圧制御部3300は、トルク指令値Trqcomなどに基づく矩形波電圧制御によってインバータ14を制御することにより、交流モータM1の出力トルクを制御する。システム電圧制御部3400は、コンバータ12の出力電圧であるシステム電圧HVを制御する。システム電圧制御部3400は、アクセル開度などに基づいてシステム電圧指令値VHcomの制限を解除して増加させる。協調制御部3500は、VHcomを増加させる際、インバータ14の矩形波電圧制御中であると、VHcomとTrqcomとを協調させて増加させる。
(もっと読む)
モーター装置及びモーター速度制御システム
【課題】モーター装置とモーター速度制御システムを提供する。
【解決手段】速度制御信号を生成する制御装置22、フィードバック信号を生成するモーター装置24、及び前記モーター装置24と前記制御装置22間に接続されたフィードバック/速度制御信号線263を含み、前記速度制御信号が前記フィードバック/速度制御信号線263によって前記モーター装置24に伝送され、且つ前記フィードバック信号が前記フィードバック/速度制御信号線263によって前記制御装置22に伝送されるモーター速度制御システム。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】異音や振動のない滑らかなモータ回転を得ることができるモータ制御装置及び該モータ制御装置を備えた車両用操舵装置を提供すること。
【解決手段】マイコン21は、指令値であるACT指令角θta*にフィードバック値であるACT角θtaが追従するようにフィードバック演算を実行して電流指令εを算出する位置制御演算部26と、同電流指令εに基づいてモータ制御信号を生成するモータ制御信号出力部30を備えた。回転角異常判定部41は、所定周期内でのモータ13の回転角変化量が変化範囲外である場合に、レゾルバ27により検出されたモータ回転角θmが異常値であると判定するようにした。
(もっと読む)
複数モータ連装スピンドル装置
【課題】 高出力で高精度を実現でき小型化が可能な複数モータ連装スピンドル装置を提供する。
【解決手段】 この複数連装スピンドル装置は、同一回転軸1上に複数個の直流ブラシレスモータ7A,7Bと制御用センサ11を有する同期型モータシステムを搭載したものである。複数個の直流ブラシレスモータ7A,7Bは互いに同等の外形と性能を有するものとする。制御用センサ10は前記回転軸1上に1個設けられて前記回転軸1の速度または回転位置を検出するものとする。個々の直流ブラシレスモータ7A,7Bの回転磁界の位相を電子回路で補正する位相合わせ手段13A,13Bを設ける。前記1個の制御用センサ10の出力のフィードバックにより前記複数の直流ブラシレスモータ7A,7Bを共通して駆動する1系統の制御ループ12を設ける。この1系統の制御ループ12にオフセット・ゲイン・位相補償の各制御手段12b,12cを設ける。
(もっと読む)
回路基板およびその回路基板を備えたブラシレスDCモータ
【課題】マイコンの無駄がなく、急な設計変更が発生しても、モータの納期の短縮も図ることができ、マイコン制御のプログラムの変更によって実装済み基板が無駄になることもなく、ROM内蔵のマイコンICを自動実装して回路基板を形成できるようにする。
【解決手段】母材1は、複数の回路領域2と非回路領域3とで構成され、各回路領域2と非回路領域3とは複数の連結部4によって連結されている。母材1の両面又は片面に必要な導通パターン、及びマイコンIC5等の各種電子部品が設けられている。各回路領域2に実装されたマイコンIC5は、マイコン制御のプログラムを記憶する書き換え可能な不揮発性メモリを備えている。マイコンIC5は、導通パターン6が連結部4を通って非回路領域3の書き換え端子8に接続されている。外部書き込み装置の書き込み端子を各書き換え端子8に接続することで、母材1の状態で各メモリへプログラムを一括して書き込むことができる。
(もっと読む)
回転位置角推定方法及び回転位置角推定装置並びにインバータ制御方法及びインバータ制御装置
【課題】突極モータにおいて磁気飽和の影響を小さくして、精度良く回転位置角を推定することが目的とされる。
【解決手段】回転位置角推定装置は、回転位置角推定部1、インバータ5及び3/2相変換部6を備える。インバータ5は、3相電流iu,iv,iwを突極モータ2に出力する。3/2相変換部6は、インバータ5から検出される3相電圧vu,vv,vw及び3相電流iu,iv,iwを2相電圧vα,vβ及び2相電流iα,iβに変換する。回転位置角推定部1は、λq演算部21、q軸電流発生部22及び位置角演算部23を有する。λq演算部21は、2相電圧vα,vβ、2相電流iα,iβ及びd軸インダクタンスLdを用いて磁束鎖交数λq,α,λq,βを求める。q軸電流演算部22は、2相電流iα,iβを回転座標変換してq軸電流iqを求める。位置角演算部23は、磁束鎖交数λq,α,λq,βとq軸電流iqとを用いて回転位置角θreを求める。
(もっと読む)
1 - 19 / 19
[ Back to top ]