
Fターム[5H680AA00]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903)
Fターム[5H680AA00]の下位に属するFターム
大トルク化 (161)
トルク均一化 (81)
高速化 (59)
低速化 (10)
高効率化 (351)
速応化 (68)
正逆転 (57)
起動、停止 (52)
共振周波数維持 (63)
耐熱ストレス (9)
耐久性、耐摩耗性、長寿命化 (235)
押圧力均一化 (137)
スリップ防止 (29)
振動、騒音防止 (112)
小型化、コンパクト化 (429)
冷却 (10)
Fターム[5H680AA00]に分類される特許
1 - 20 / 40
超音波モータ
【課題】組み立て容易性が良好な超音波モータを得る。
【解決手段】楕円振動が励起される積層圧電素子40と、前記楕円振動を駆動源として回転駆動されるロータ機構部10と、積層圧電素子40をロータ機構部10に圧接させる押圧機構部20と、フレーム30と、フレーム30のうち積層圧電素子40に対向する面に設けられ、振動子40をその厚み方向においてフレーム30と共に挟持する挟持部51s1−1〜4および51s2−1〜4と、を超音波モータに具備させ、前記フレーム30及び前記挟持部51s1−1〜4および51s2−1〜4のうち少なくとも一方は、積層圧電素子40の厚み方向について弾性力を有し、前記挟持部51s1−1〜4および51s2−1〜4は、フレーム30と積層圧電素子40とに対して圧接している。
(もっと読む)
超音波モータ

【課題】簡略な構造で組み立て容易性の高い超音波モータを提供すること。
【解決手段】中心軸に垂直な断面が矩形状を呈し、前記中心軸方向に伸縮する縦振動と、前記中心軸を捻れ軸とする捻れ振動と、が同時に励起されることで楕円振動を発生する振動子であって、前記矩形状を構成する短辺Tと長辺Wとの長さの比率が、当該振動子に励起される縦振動の共振周波数と捻れ振動の共振周波数とが略一致する値に設定された振動子40を超音波モータに具備させる。そして、振動子40に、縦振動の節部に対応する領域に形成され、当該振動子に縦振動を励起する為の第1の分極部101Lと、前記捻れ振動の腹部に対応する領域に形成され、当該振動子に捻れ振動を励起する第2の分極部101A1,101A2,101A3,101A4,101B1,101B2,101B3,101B4と、を備えさせる。
(もっと読む)
リニア駆動装置
【課題】同じ種類のリニア駆動装置における振動量のばらつきを防止し且つ安定な振動量を得ることができると共に、振動量の増大を図ることができるリニア駆動装置を提供する。
【解決手段】振動部材17と、振動部材17に基端26を固定した駆動軸21とを備え、振動部材17の振動により駆動軸21がその軸線方向に振動することにより、駆動軸21に摩擦係合した移動体が駆動軸21の軸線方向に沿って摺動するリニア駆動装置において、振動部材17は、通電により伸縮する圧電素子23と、弾性を有する板状の振動子19とを有し、振動子19は圧電素子23の一側面に板面を重ねて固定してあり、振動部材17には駆動軸21が固定してある側と反対側の面に錘部材32が固定してある。
(もっと読む)
アクチュエータおよび光学装置
【課題】簡単な構成で、2次元の位置決めができるアクチュエータを提供する。
【解決手段】アクチュエータ6は、印加された電圧に応じて機械的変位を生じる電気機械変換素子11と、電気機械変換素11子の機械的変位によって軸方向に変位させられるとともに傾斜させられる駆動軸12と、駆動軸12に摩擦係合する移動体13と、電気機械変換素子11に、移動体13が駆動軸12に対して滑り変位しない低い変化率で駆動軸12を所望の角度に傾斜させる直流駆動電圧と、移動体13が駆動軸12に対して滑り変位するように駆動軸12を軸方向に振動させる交流駆動電圧とを重畳して印加する駆動回路とを有する。
(もっと読む)
圧電モーターの製造方法、圧電モーター、液体噴射装置及び時計
【課題】 圧電素子と振動部材との位置関係を高精度に維持しながら効率良く所定の作業を進めることができる圧電モーターの製造方法を提供する。
【解決手段】 圧電アクチュエーター10と、回転軸と、圧電アクチュエーター10を回転軸に向かって付勢する付勢手段とを具備する圧電モーターの製造方法であって、突起部21を中心として左右両側の対称な位置で振動部材の前記突起部側の一端部に位置決め用の測定パターン24,24Aを形成する工程と、前記圧電素子における前記測定パターンに対応する位置を切欠いて窓部25,25Aを形成する工程と、前記振動部材に前記圧電素子を載置するとともに前記窓部の外縁を規定する辺28,29,38,39と前記測定パターンとの相対的な位置関係が所定の位置関係になるように前記圧電素子の前記振動部材に対する相対的な位置関係を調整する工程とを有する。
(もっと読む)
圧電モーターの製造方法、圧電モーター、液体噴射装置及び時計
【課題】 圧電素子と振動部材との位置関係を高精度に維持しながら効率良く所定の作業を進めることができる圧電モーターの製造方法を提供する。
【解決手段】 圧電アクチュエーター10と、回転軸3と、圧電アクチュエーター10を回転軸3に向かって付勢する付勢手段80とを具備する圧電モーター1の製造方法であって、突起部21の基端となる振動部材20の短手方向の辺と突起部21の境界に圧電素子30の厚さ方向に突出する凸部26を形成するとともに、振動部材20の長手方向の二辺の相対向する位置から面方向に突出している腕部22の基端となる前記長手方向の二辺のそれぞれの境界に前記圧電素子30の厚さ方向に突出する凸部27を形成する工程と、凸部26、27に圧電素子30の端面を当接させて振動部材20に対する圧電素子30の位置を規制することによりその位置合わせを行ないつつ振動部材20に圧電素子30を貼着する工程とを有する。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、カメラ
【課題】振動アクチュエータに対する入力電力の損失を低減し、効率的に電力を供給する振動アクチュエータ駆動装置を提供する。
【解決手段】振動アクチュエータ駆動装置(100)は、電圧を印加される1次側インダクタ(311A、311B)と、電気機械エネルギー変換素子(41A、41B)に電圧を印加する2次側インダクタ(314A、314B)とを有するトランス部(31A、31B)と、2次側インダクタ(314A、314B)と、電気機械エネルギー変換素子(41A、41B)との間に流れる電流の通電状態を切り替えるスイッチング部(34A、34B)と、1次側インダクタ(311A、311B)に流れる電流の方向に応じて、スイッチング部(34A、34B)により2次側インダクタ(314A、314B)に流れる電流の通電状態を切り替える制御部(2)とを具備する。
(もっと読む)
超音波モータ
【課題】 板状圧電素子と弾性体とを容易に位置決めできる超音波モータを提供すること。
【解決手段】 超音波モータ1は、平面124aと斜面124bと貫通口124cとを有する中空の柱形状の中部基本弾性体124と、貫通口19aを有し斜面124bに傾斜した状態で積み重なる積層型圧電素子18と、平面126aと斜面126bと貫通口126cとを有し、斜面126bにて積層型圧電素子18に積み重なり、斜面124bと斜面126bとの間で積層型圧電素子18を挟み込む中空の柱形状の上部基本弾性体126と、平面126aの上方に配設される摩擦子26と、摩擦子26によって駆動されるロータ53と、ロータ53を摩擦子26に押圧する押圧機構70と、上部基本弾性体126と積層型圧電素子18と中部基本弾性体124とに配設され、それぞれの積層方向に対する周方向における積層型圧電素子18の位置決めを行う位置決め機構140と、を具備する。
(もっと読む)
振動波駆動装置
【課題】磨耗した摩擦部材だけを容易に交換することを可能とした振動波駆動装置を提供する。
【解決手段】振動波モータは、弾性体1、圧電素子2、摩擦部材3を備える。弾性体1及び圧電素子2からなる振動体は、圧電素子2により振動が励起される。移動体は、弾性体1に対して接触加圧力で押圧され弾性体1に励起された振動により弾性体1に対して相対的に移動される。摩擦部材3は、弾性体1と移動体との間に設けられ弾性体1の面と移動体の面に当接する接触面を有する。摩擦部材3は、その接触面が弾性体1と移動体の何れの接触面とも固着されていないと共に、弾性体1の接触面と一体的な挙動を示す。
(もっと読む)
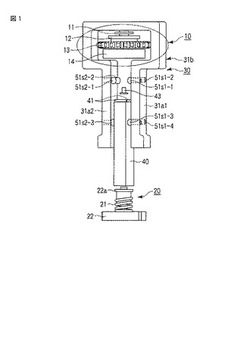
圧電駆動装置
【課題】小型かつ軽量で、駆動特性に優れ、汎用性も高い圧電駆動装置を提供する。
【解決手段】圧電駆動装置10は、弾性を有する固定フレーム12,駆動素子30,ロッド40,ロータ50により構成される。ロッド40は外周面に鍔部46を有しており、一端が駆動素子30の主面略中央に固定される。ロータ50は、筒部52とディスク部56から形成されており、ロッド40に対して回転可能となっている。固定フレーム12の上面部16の内側には、ディスク部56に押圧をかける突起22が設けられる。駆動素子30は、素子の中心を原点として分割された4つの素子構造を組み込んだ構成となっている。駆動素子30に、対角の変位素子部分同士が逆位相,隣接の素子部分間の位相差が90°の交番電場を印加するとロッド40が傾きながら回転し、鍔部46との面接触による摩擦によってロータ50が回転する。
(もっと読む)
超音波モータの駆動方法
【課題】超音波モータの安定かつ効率の良い駆動方法を提供すること。
【解決手段】本発明にかかる超音波モータの駆動方法は、第1周波数の交流電圧をアクチュエータ部に印加して前記超音波モータを始動する工程と、前記第1周波数から前記超音波モータが停止する第2周波数まで駆動周波数を下げながら、該アクチュエータ部に生じる電圧を検出する電圧検出工程と、第3周波数で前記超音波モータを始動する始動工程と、前記駆動周波数を運転周波数範囲内の値となるように、前記第3周波数から低周波数側に変化させる駆動工程と、を有し、前記運転周波数範囲は、前記電圧検出工程において最大電圧が検出される際の前記駆動周波数の値よりも高周波数側の範囲である。
(もっと読む)
摩擦駆動アクチュエータ
【課題】装置の複雑化、高価格化を招くことなく、高精度な位置決めが可能な摩擦駆動アクチュエータを提供する。
【解決手段】駆動信号により伸縮する圧電変位部を備え、該圧電変位部の伸縮により励振される振動体と、振動体に接触し、該振動体に対して相対移動を生じる摺動体と、振動体と摺動体とを加圧接触させる加圧部と、を有する摩擦駆動アクチュエータにおいて、振動体と摺動体は、加圧部によって加圧接触された状態で、振動体と摺動体との相対位置の所定の相対移動方向と直交する方向への移動を規制する規制部を、振動体と摺動体との接触位置に、それぞれ有する。
(もっと読む)
ステージ機構、及びそれを備えた電子顕微鏡、並びにステージ機構の位置決め制御方法
【課題】低振動でドリフトが小さく高精度の位置決めを行える電子顕微鏡用ステージ機構を実現する。
【解決手段】ステージの駆動機構に超音波モータを用いるとともに、停止剛性を高める固定機構をモータと一体化する。すなわち、与圧機構に超音波モータと共に固定機構のピエゾ素子をマウントする構造を用い、ステージの加速減速及び位置決めを駆動機構で行った後、固定機構によりステージを固定する際、ステージの両側に位置するピエゾ素子が伸長し、ステージを押圧するように構成する。
(もっと読む)
超音波モータ制御装置
【課題】 モータの発熱量を大きくすることなく固着現象を効果的に解消して正常に起動させることが可能な超音波モータ制御装置を提供すること。
【解決手段】 ステータ及びロータを備えてなる超音波モータを制御する超音波モータ制御装置において、通常時駆動電圧によって上記超音波モータを駆動する駆動回路と、上記通常時駆動電圧より高い固着時駆動電圧によって上記超音波モータを駆動する昇圧回路と、上記超音波モータの起動時に上記昇圧回路を適宜使用することにより上記ステータとロータの固着に起因した動作不良をなくす制御手段と、を具備したもの。
(もっと読む)
超音波モータ用振動子
【課題】入出力特性の非線形性を緩和して得られる、微動領域での制御性(位置決め精度)の高い超音波モータ用振動子、及び振動効率の高い超音波モータ用振動子の提供。
【解決手段】積層する全ての圧電素子に、屈曲振動を励振させる電極領域と伸縮振動を励振させる電極領域とを配置し、各振動を独立して制御できる積層圧電素子を提案する。入出力特性の非線形性が緩和され、超音波モータ用振動子の微動領域での動作性能を高めることができる。
(もっと読む)
駆動波発生回路
【課題】ピエゾ素子の駆動波を効果的に発生する。
【解決手段】ドライブパルスDRIVEをドライブカウンタ14でカウントする。また、基本波形発生回路10からの基本波形の出力の所定数を200周期カウンタ12でカウントし、そのカウント値をドライブカウンタ14から減算する。そして、このドライブカウンタ14の値が初期値より大きいときに出力ゲーT20から駆動波を出力する。また、シリアルI/F50を介し外部から入力される出力状態信号ACTIVEをレジスタ44に格納し、このACTIVEがオン状態の時に出力ゲート20から駆動波を出力する。
(もっと読む)
振動アクチュエータ
【課題】安定して高い位置精度で、容易に相対移動を発生させることが可能な振動アクチュエータを提供する。
【解決手段】移動体の振動体との接触面は、移動方向に沿って表面状態の異なる通常区間とスタック区間の連続する2つの区間から構成され、スタック区間における振動体から移動体に伝達される駆動力は、通常区間における駆動力よりも小さく、振動体の振動振幅を制御する制御部は、通常区間においてのみ移動体を移動可能な振動振幅で振動体を振動させる通常励振モードと、振動振幅が通常励振モードより大きく、通常区間およびスタック区間のいずれにおいても移動体を移動可能な振動振幅で振動体を振動させる拡大励振モードを備え、通常励振モードと拡大励振モードとをそれぞれ所定の時間毎に切替えて実行する。
(もっと読む)
弾性表面波アクチュエータ
【課題】弾性表面波アクチュエータにおいて、簡単な構成で大型化を抑制すると共に精度良い位置検出を実現する。
【解決手段】弾性表面波アクチュエータ1は、駆動用の弾性表面波を励振する駆動用励振手段2を有した圧電基板10と、圧電基板10の表面に配置され駆動用の弾性表面波により圧電基板10に対して相対的に移動される移動体3と、移動体3の圧電基板10に対する相対位置の検出に用いる検出用の弾性表面波を励振する検出用励振手段4と、検出用励振手段4によって励振された弾性表面波w1が移動体3によって反射されて戻ってくる波w2を検出する表面波検出手段5と、移動体3の圧電基板10に対する相対移動を制御する制御手段6と、を備える。制御手段6は、弾性表面波w1が前記検出用励振手段4により励振されてから表面波検出手段5によって検出されるまでの時間に基づいて移動体3の相対的位置を検出して移動体3の移動を制御する。
(もっと読む)
振動子及び振動波駆動装置
【課題】電気−機械エネルギ変換素子と導通部品の機械的結合及び電気的接続において、振動子に振動を励起した時の機械的損失を少なくし、結合面の密着度合いを良好にすることを少ない部品点数で可能にした振動子及び振動波駆動装置を提供する。
【解決手段】振動波駆動装置の振動子は、振動体2、表面に電極を有し圧電素子4と電源の導通を行うフレキシブル基板2、表面に電極を有し電気量を機械量に変換する圧電素子4を備える。圧電素子4とフレキシブル基板2を、圧電素子4のパターン電極4aを有する面の一部と、フレキシブル基板2の電極を有さない面であるベース面の一部とにおいて、接着剤により結合する。圧電素子4とフレキシブル基板2は、接着剤により結合された各々の機械的結合面の少なくとも一方(フレキシブル基板2のベース面)が電極を有さない構造を有する。
(もっと読む)
弾性振動体の励振方法および振動型駆動装置
【課題】設計を容易化するとともに設計の自由度を確保でき、さらに、低コスト化を図る上で有利な振動型駆動装置を提供する。
【解決手段】振動型駆動装置10は、ベース12と、2つの支持体14と、弾性振動体16と、駆動回路18とを備えている。2つの支持体14は断面が矩形状を呈し、断面の縦横よりも大きい寸法の高さを有する柱状に形成されている。支持体14は、入力される駆動信号に応じて高さ方向に伸縮する電気−機械エネルギー変換素子から形成されている。弾性振動体16は、本体板部20と突起部22とを備えている。突起部22の上端22Aは、この突起部22の振動によって動かされる被振動体に当て付けられる。駆動回路18は、第1、第2の支持体14A、14Bにそれぞれ第1の駆動信号SA、第2の駆動信号SBを供給する。
(もっと読む)
1 - 20 / 40
[ Back to top ]