
Fターム[5H680AA15]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903) | スリップ防止 (29)
Fターム[5H680AA15]に分類される特許
1 - 20 / 29
振動型駆動装置とその移動体の製造方法
【課題】低コスト化、高精度化を図ることが可能となる振動型駆動装置とその移動体の製造方法を提供する。
【解決手段】電気−機械エネルギー変換素子への交流電圧の印加により振動子に楕円運動を励振させ、振動子と接触する移動体を相対移動させる振動型駆動装置であって、
移動体は、本環部と複数の板ばね部とを備え、
複数の各板ばね部は、該板ばね部と本環部を接合する固定部と、振動子と接触する接触部と、接触部と固定部を連結する連結部と、を有し、
接触部に振動子が接触して連結部が変形した際に、板ばね部に所定のバネ剛性を持たせるように、本環部と接触部との間に空間部を設けて複数の板ばね部が固定部を介して本環部と接合される。
(もっと読む)
モーター、ロボットハンドおよびロボット

【課題】被駆動体と圧電アクチュエーターの突起との接触部において、付勢方向に対して交差する方向の相対的なずれによるアクチュエーターと被駆動体とのすべりを抑制し、圧電アクチュエーターの振動の被駆動体への伝達効率が高いモーターを提供する。
【解決手段】被駆動手段と、前記被駆動手段に付勢する突起31aを端部に有する振動板31と、前記振動板31に積層される圧電体32,33と、を有するアクチュエーター30と、前記アクチュエーター30を前記被駆動手段に付勢する付勢手段と、を備えるモーター100であって、前記付勢手段の付勢方向が、前記振動板31の振動面と交差するモーター100。
(もっと読む)
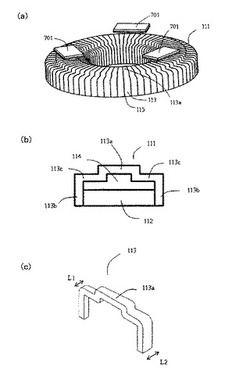
円環型振動波アクチュエータ
【課題】円環型振動波アクチュエータにおける接触部の接触面圧を接触面の全体に分散させることができ、駆動方向と垂直な方向への滑りを低減させることにより、耐久性の向上を図ることが可能となる円環型振動波アクチュエータを提供する。
【解決手段】円環形状の振動部と、振動部と摩擦接触し、振動部の振動により振動部に対して相対移動する円環形状の被駆動部と、を有する円環型振動波アクチュエータであって、
円環形状の被駆動部は、
円環形状の被駆動部の内周側から振動部の側に突出した内周側支持部と、円環形状の被駆動部の外周側から振動部の側に突出した外周側支持部とによる、バネ性を有する材料により形成された二つの支持部によって支えられた振動部と接触する接触部を備え、
外周側支持部の変形量が内周側支持部よりも大きい変形量となるように、外周側支持部と内周側支持部とを異なる形状に形成して剛性に差がつけられている。
(もっと読む)
超音波モータ
【課題】縦振動とねじれ振動を容易に励起することができ、かつ、接着の信頼性を向上させた超音波モータを提供する。
【解決手段】中心軸に垂直な断面が矩形状の長さ比率を有する振動子と、振動子の楕円振動発生面に接して振動子の楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータと、振動子に固定される固定部材と、ロータと固定部材を結合する第1枠と、固定部材に結合される第2枠と、ロータと振動子を圧接させる第1付勢手段と、第2枠と振動子を圧接させる第2付勢手段と、を備え、固定部材と振動子の固定面に沿って、振動子の両端面から均衡するように押圧を行い、回転軸の方向に伸縮する縦1次共振振動と、ねじれ2次又はねじれ3次共振振動と、を合成することにより、楕円振動を形成する。
(もっと読む)
マニピュレータ
【課題】動作中に駆動部の剛性を連続的に変化させることができるマニピュレータ及びその制御装置。
【解決手段】3軸角度検出器27a、27b、27cの出力信号を位置姿勢算出手段29においてマニピュレータ9の先端部位置および姿勢を算出する。その結果を用いて、作用力算出手段30において各駆動部に作用するトルクをそれぞれ算出する。ステータ押付力算出手段31では、駆動トルクを確保するのに必要なステータ押付力を算出する。電磁力算出手段32において、ステータ押付力算出手段31で求めたステータ押付力を電磁石20a、20bで発生する電磁力へ変換し、電磁石20a、20bへ電圧を印加する。一方、位置姿勢算出手段29で算出した位置姿勢データ、指令値入力装置28で入力されたマニピュレータ9の先端部の位置姿勢データを用いて、制御量算出手段34において各駆動部の球面超音波モータの制御量を算出しモータへ供給する。
(もっと読む)
電気機械モータに対する法線力の付与
電気機械モータ組立体(1)は、ステータ(30)と、移動対象体(10)と、ステータ支持部(35)とを備える。ステータ(30)は、常に電気機械アクチュエータ(20)のうちの少なくとも1つを確実に対象体(10)と非スライド方式で接触させるステップの反復により対象体(10)を移動させるように構成された複数の電気機械アクチュエータ(20)を有する。組立体は、さらに、少なくとも1つのバネ構成部(42)により、ステータとステータ支持部との間に法線力(N)を加える加力構成部(40)を備える。バネ構成部(42)は、対象体(10)の表面(5)に対する法線方向(Z)に、法線力(N)と、対象体(10)の表面(5)の平均高さ不確定性との比の5%未満となる低いバネ定数を有する。加力構成部(40)は、さらに、主運動方向(X)に平行で、かつ、対象体(10)の表面(5)に対して並置された状態で、ステータ(30)とステータ支持部(35)との間に取り付けられた横固定板(46)を備える。 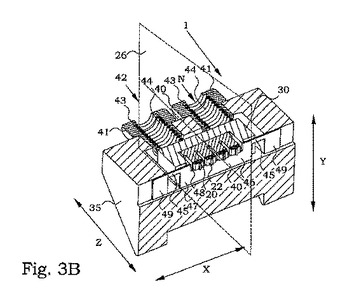 (もっと読む)
(もっと読む)
レンズ鏡筒及びそれを有する光学機器
【課題】 振動部材と接触部材とを圧接させるための磁石の磁力を効率よく利用し、吸着力を大きくすることができるとともに、他の機器への影響も低減してレンズ保持部材を移動させることができるレンズ鏡筒を得ること。
【解決手段】 レンズユニットと、前記レンズユニットを保持するレンズ保持部材と、電気−機械エネルギー変換作用により振動が励起される振動部材および該振動部材と圧接する、接触部材を含み、前記レンズ保持部材を光軸方向に駆動する振動型のリニアアクチュエータと、を有するレンズ鏡筒において、前記振動部材と前記接触部材は、これらの間に作用する磁力により圧接されており、前記接触部材は、前記振動部材と向き合う面において、磁界の方向が移動方向に同じで且つ移動方向に垂直な方向に、1回以上反転している磁石とを有すること。
(もっと読む)
超音波モータ
【課題】この発明は、簡便にして容易な加工製作を実現したうえで、接触組立の均一化の促進を実現して、駆動効率の向上を図るようにした超音波モータを提供することにある。
【解決手段】圧電素子10に固着したホルダ部材15に移動方向と直交する方向にそれぞれ係合凸部152を有した湾曲状の摺接突起部151を設け、位置規制部材12に圧電素子10を収容する収容孔121を設けて、この収容部121の内壁面に係合凹部122を有した摺接凹部121を設け、圧電素子10を位置規制部材12の収容孔121に収容すると共に、ホルダ部材15の摺接突起部151及び係合凸部152を収容孔121の摺接凹部122及び係合凹部123に挿入した状態でホルダ部材15を押圧部材16により押圧して、圧電素子10の駆動子11を被駆動体14に圧接するように構成したものである。
(もっと読む)
超音波モータ
【課題】振動子が被駆動体を安定して微小駆動させることができる超音波モータを提供すること。
【解決手段】圧電積層体2aを有する超音波振動子2と、前記超音波振動子2に固着され且つ前記超音波振動子2を保持する保持部材3と、前記保持部材3を押圧する押圧部材9と、前記超音波振動子2との間の摩擦力により駆動される被駆動部材4と、を具備し、前記押圧部材9は丸穴部9cを有し、前記保持部材3は前記押圧部材9による押圧の方向において前記丸穴部9cと係合する円錐形状突起部3aを有し、前記丸穴部9cと前記円錐形状突起部3aとが当接することで、前記押圧部材9が、前記保持部材3及び前記超音波振動子2を介して前記被駆動部材4を押圧して、前記被駆動部材4を駆動する超音波モータ。
(もっと読む)
アクチュエータケースおよび超音波モータ
【課題】圧電アクチュエータを簡単な構造で、かつ、その動きを阻害しないように保持するアクチュエータケースとこれを用いた超音波モータを提供する。
【解決手段】L1B2モードで駆動される矩形板状の圧電アクチュエータ10を保持するケース20は、圧電アクチュエータ10を直接に把持する凹型形状の第1ケース部30と、第1ケース部30を嵌挿保持する凹型形状の第2ケース部40と、円柱形状でその中心軸が圧電アクチュエータ10の厚さ方向と平行となり、かつ、その側面の一部が露出するように第1ケース部30の側壁部21aに取り付けられたコマ25を具備する。第1ケース部30の側壁部21bを圧電アクチュエータ10に押し付けると圧電アクチュエータ10は側壁部21aを介して外壁部26aを押圧する。このときコマ25の側面が外壁部26aと接触することで、圧電アクチュエータ10の厚さ方向でのぶれが抑制される。
(もっと読む)
定在波型超音波アクチュエータの駆動方法およびその駆動装置
【課題】起動時には、被駆動体の落下を防止するとともに被駆動体の不安定な動作を解消することができ、駆動停止時には、被駆動体が停止するまでの時間を短縮することができる定在波型超音波アクチュエータの駆動方法およびその駆動装置を提供することを目的とする。
【解決手段】定在波型超音波アクチュエータ10の駆動方法は、超音波振動子4に縦振動と屈曲振動とを発生させることにより、超音波振動子4の摩擦接触子18に略楕円振動を生じさせ、該楕円振動の摩擦力を推力として、超音波振動子4と超音波振動子4に接触する被駆動体2とを相対的に移動させる定在波型超音波アクチュエータ10の駆動方法であって、起動時に、前記縦振動を励起した後に、前記屈曲振動を励起させる。
(もっと読む)
超音波モータ
【課題】 温度上昇に伴う回転効率の低下を防止した超音波モータを提供する。
【解決手段】 櫛歯体12を備えるステータ1と、櫛歯体12の圧接面12aに圧接される圧接面21aを有する回転可能なロータ2と、ステータ1とロータ2を圧接させるための弾性手段16とを備え、両圧接面の少なくとも一方に温度変化によって摩擦係数が変化する樹脂膜4を有する超音波モータであって、温度変化に伴って弾性手段16の弾性力を変化させ、樹脂膜4の圧接面4aにおける摩擦力をほぼ一定に保持させる圧接力調整手段として形状記憶合金で弾性手段16を構成する。温度上昇して樹脂膜4の摩擦係数が低下した場合でも、圧接力調整手段により圧接力を増大し、樹脂膜4の圧接面4aでの摩擦力をほぼ一定に保持し、温度変化に伴う回転効率の低下を防止する。
(もっと読む)
スライダ駆動用アクチュエータ
【課題】振動体の形状精度に大きく影響されることなくスライドを案内レールの長手方向に安定して直線駆動することのできるスライダ駆動用アクチュエータを提供する。
【解決手段】モータケーシング11内に収容された超音波リニアモータ12が、互いに平行な少なくとも二本の脚部13c,13dを有する振動体13と、振動体13を所定方向に付勢して脚部13c,13dの先端に固着された摺動部材15を案内レールと平行に配置された固定部材3の平面部3aに押し当てる圧縮コイルばね16とを備えてなるスライダ駆動用アクチュエータにおいて、固定部材3の平面部3aに当接する摺動部材15の先端を球面形状とした。
(もっと読む)
駆動装置
【課題】圧電素子などを樹脂材からなる支持部材により支持することにより、移動対象物を精度良く移動できる駆動装置及び駆動装置の製造方法を提供すること。
【解決手段】圧電素子12に駆動軸14が取り付けられ、駆動軸14の長手方向に沿って移動可能に被駆動部材16が取り付けられ、圧電素子12と静止部材10の間に樹脂材を充填し硬化させて圧電素子12を支持する支持部材5が設けられている。このため、圧電素子12及び駆動軸14を所定の位置に配置した後に樹脂材を充填し硬化させることにより、圧電素子12及び駆動軸14を正確な位置に配置することができ、被駆動部材16や被駆動部材16に取り付けられる移動レンズ70を精度良く移動させることができる。
(もっと読む)
駆動装置、振動アクチュエータ、及び、電子機器
【課題】振動体の振動面の精度が良い駆動装置、振動アクチュエータ及び電子機器を提供する。
【解決手段】 振動体(11)は振動面(12a)とは異なる面にフランジ部(12d)を有する。取付部材(40)はフランジ部(12d)に取り付けられる取付部(42)を有する。取付部(42)はフランジ部(12d)に対向する部分に複数の凹部(43)を有することを特徴とする駆動装置(10)である。
(もっと読む)
インパクト駆動アクチュエータ及びこれを用いたレンズ駆動装置
【課題】移動体の移動自由度が高く、安定した動作を可能とすること。
【解決手段】インパクト駆動アクチュエータは、固定部材1に設置され、第1の方向とその逆の第2の方向に微小変位を発生する変位発生手段2と、該変位発生手段の上記微小変位によって往復運動する振動部材4と、該振動部材の第1の平面上に設置された移動体3と、該移動体と上記振動部材との間の吸着力を制御する吸着力制御手段と、一端が上記固定部材に固定され、上記振動部材に沿って配置された移動体保持手段5と、を備える。上記移動体は、上記移動体保持手段と上記振動部材とに挟み込まれるように支持されることにより、上記振動部材と上記移動体保持手段のそれぞれと摩擦結合する。そして、上記吸着力制御手段により発生する吸着力により、上記移動体と上記振動部材間の摩擦力と上記移動体と上記移動体保持手段間の摩擦力とに差異が生じるように制御する。
(もっと読む)
周波数制御回路、モータ駆動装置、周波数制御方法、モータ駆動装置の制御方法、及び、制御方法をコンピュータに実行させるプログラム
【課題】発振部の発振周波数及び各振動モードの駆動信号の位相差を細かく設定することを可能としたモータ駆動装置及び制御方法を提供する。
【解決手段】振動波モータは、振動体4、圧電素子5、移動体7を備える。振動波モータ駆動回路は、CPU32、増幅回路33a、増幅回路33b、発振器部34、位置検出部35を備える。発振器部34は、加算器36に内蔵したカウンタにより単位時間あたりに発振周波数設定値を加算し、加算値がAモード及びBモードにそれぞれ対応して設定された設定値を超えた場合に駆動信号のHiとLoを切り替える動作を繰り返し、Aモード及びBモードにそれぞれ対応する位相差の異なる駆動信号を振動波モータに出力する。
(もっと読む)
超音波モータ
【課題】 ロータとステータの圧接状態を改善してロータの回転効率を向上した超音波モータを提供する。
【解決手段】 圧電体13及び円周方向に配列した多数の櫛歯121を備える櫛歯体12で構成されるステータ1と、回転軸3に支持されて櫛歯に圧接されるロータ2とを備え、各櫛歯121は少なくともロータ2に圧接する部分が所要の間隔で径方向に配列された複数の針状体122で構成する。針状体122は先端部が径方向に弾性変形可能で、円周方向には所要の剛性を有する構成とする。ロータ2が櫛歯121に圧接したときに針状体122は径方向に弾性変形することで各針状体122の先端がロータ2に確実に圧接し、ロータ2と櫛歯121との摩擦力を所定の摩擦力に保持でき、ステータ1の振動によるロータ2の回転効率を高くする。
(もっと読む)
駆動装置
【課題】駆動部材を黒鉛複合体で構成することによって、駆動部材と被駆動部材との摩擦を軽減且つ安定させ、被駆動部材の移動を正確且つ迅速に行うことのできる駆動装置を提供する。
【解決手段】駆動装置100は、電気信号の入力により伸縮可能な電気機械変換素子12と、この電気機械変換素子12の伸縮方向の一方側の端部に取り付けられた駆動部材14と、この駆動部材14に摩擦係合される被駆動部材16と、を備え、駆動部材14を、例えばカーボングラファイト等の黒鉛複合体によって形成する。
(もっと読む)
5度の自由度を持つ、キャリヤ用移動プラットホーム
【課題】キャリヤ及び間隔が隔てられた少なくとも三つのクランプ手段を含む移動プラットホームを提供する。
【解決手段】クランプ手段の各々は、キャリヤを、接触点のところで、及びキャリヤの少なくとも一つのグローブ状接触面のところでクランプし、少なくとも一つのクランプ手段には、キャリヤを少なくとも二つの仮想軸線を中心として回転できるように、接触点を、少なくとも夫々の接触面及び/又は少なくとも夫々のクランプ手段に対して変位するための少なくとも一つの変位エレメントが設けられており、クランプ手段によってキャリヤに加えられる法線力は、ほぼ平行な平面内にあり、これらの平行な平面は、夫々の接触点でのグローブ状表面の接線方向平面に対してほぼ垂直である。
(もっと読む)
1 - 20 / 29
[ Back to top ]