
Fターム[5H680DD26]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 振動子 (4,401) | 振動子の構造 (3,460) | 分極の方向 (273)
Fターム[5H680DD26]の下位に属するFターム
Fターム[5H680DD26]に分類される特許
1 - 14 / 14
超音波アクチュエータ
【課題】複数の振動子間の調整が不要であり、小型でありながら強い発生力を有するリニア型超音波アクチュエータを提供する。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された複数の移動体と、駆動部に結合され、複数の移動体に対する把持力をそれぞれ調整可能に構成された複数の伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、を備え、複数の伝達部は、挟持方向において駆動部の一方の端部側に配置されるとともに、駆動部の振動の複数の腹位置にそれぞれ配置されている。
(もっと読む)
超音波アクチュエータ

【課題】小型でありながら強い発生力を有するリニア型超音波アクチュエータを提供する。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された移動体と、駆動部に結合され、移動体に対する把持力を調整可能に構成された伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、を備え、伝達部は、初期状態において移動体が移動しないように移動体をある周期をもって把持する。
(もっと読む)
駆動装置及びロボット装置
【課題】単純な構成とすることができ、小型化が可能であり、低コスト化を実現可能な駆動装置及びロボット装置を提供すること。
【解決手段】所定の駆動方向に駆動される可動子と、互いに反対方向に分極された一対の圧電層が一体化された圧電層対を有し、前記可動子への近接方向に振動すると共に前記可動子の駆動方向に振動するように形成された電気機械変換素子と、前記電気機械変換素子に対して、前記近接方向の振動と前記駆動方向の振動とを選択的に行わせる制御部とを備える。
(もっと読む)
超音波モータ
【課題】小型化を図ると共に、効率が高く、さらに構造が簡単である超音波モータを提供する。
【解決手段】矩形型の圧電振動子1が、第一次縦振動モードと第一屈曲振動モードとを組み合わせた多重振動モードで振動することにより駆動力を発生する超音波モータであって、圧電振動子1が第一次縦振動モードで振動する際の伸縮方向の長さをLとし、圧電振動子1が第一次屈曲振動モードで振動する際の幅方向の長さをwとし、w/Lを変数として、w/Lと圧電振動子1の第一次縦振動モードの共振周波数とを対応させると共に、w/Lと第一次屈曲振動モードの共振周波数とを対応させた場合、圧電振動子1は、第一次縦振動モードの共振周波数と第一次屈曲振動モードの共振周波数とが実質的に同一となるw/Lの値に基づいて形成されている。
(もっと読む)
圧電アクチュエータ
【課題】圧電アクチュエータの駆動効率を簡易な構成で向上させることにある。
【解決手段】立方体形状のステータ11には軸方向に貫通する貫通孔12が形成されており、貫通孔12には直進往復動自在にシャフト13が装着される。ステータ11のそれぞれの外周面には振動源である圧電セラミックス14が設けられて、圧電セラミックス14の外面に軸方向に2つの電極15,16が形成されるとともに、圧電セラミックス14の内側がステータ11を介して接地される。それぞれの電極15,16に相互に位相の異なる交流電圧が印加されると、貫通孔12の内周面に軸方向の楕円運動が形成されてシャフト13が軸方向に摩擦駆動される。シャフト13には中心方向に切り込まれたスリット23が形成されており、このスリット23がシャフト13の外周面とステータ11の内周面との摩擦接触圧を設定する設定部となっている。
(もっと読む)
振動波駆動装置の制御装置、及び、振動波駆動装置の制御方法
【課題】被駆動体を移動させる振動波駆動装置に対して位相差制御或いは電圧制御を行っている最中に、固定した振動子駆動周波数よりも振動子の共振周波数が高周波側にシフトする現象を抑制することを実現する。
【解決手段】制御装置は、電気−機械エネルギー変換素子である圧電素子を備えた振動型アクチュエータに対して駆動信号を与え、この駆動信号の位相差及び電圧の少なくとも一方を変更して、振動型アクチュエータを駆動制御する。その際、駆動信号の位相差及び電圧の少なくとも一方を変更するときには、変更しないときに比較して、前記駆動信号の周波数を高周波側の所定の周波数に設定する。
(もっと読む)
超音波モータ及びそれを用いた電子機器
【課題】
矩形板形状の振動体に発生する振動の励振力を高め、超音波モータの出力を向上させる。
【解決手段】
そこで、上記課題を解決する為に本発明の超音波モータは、圧電素子を有する振動体と、振動体と接する移動体と、を有し、圧電素子の一方の面に設けられた第一の電極群に駆動信号を印加するか、第一の電極群と分極方向の異なる部分に設けられた第二の電極群に駆動信号を印加するかを選択することで振動体に発生する二つの異なる振動の位相を変え、移動体もしくは振動体自体の移動方向を可変とする。
(もっと読む)
振動アクチュエータ及び該振動アクチュエータを備えた光学機器
【課題】振動子とスライダの接触面に付着した磨耗粉や塵埃等の異物を除去し、耐久性の低下や異音の発生等の不具合を防止する。
【解決手段】(S11)装置の電源投入後に、駆動モード切換回路により駆動を異物除去駆動モードに切換える。
(S12)定在波を発生させることで、振動アクチュエータは振動により振動子、スライダ、レンズ群に付着した異物を除去する。
(S13)駆動モード切換回路により、駆動モードを通常駆動モードに切換える。
(S14)通常駆動により振動アクチュエータを駆動し、レンズ群の基準位置の検出動作を行う。
(S15)基準位置検出センサの出力信号から基準位置を検出及び算出し、レンズ群の位置を絶対値化する。
(もっと読む)
積層圧電素子及びその製造方法、並びに振動波駆動装置
【課題】駆動部4と非駆動部5から成る積層圧電素子のおいて、焼成や分極による反りを抑制できる積層圧電素子を提供する。
【解決手段】非駆動部5に駆動部4よりも厚さが厚く、広い面積の電極層を設け、場合によりこの電極層を用いて分極し、積層圧電素子の反りを抑制する。その方法として、駆動部4の電極層になる導電ペースに比べ、非駆動部5の電極層になる導電ペーストの導電材料の比率や塗布量を増やし印刷して電極層を形成する。
(もっと読む)
マイクロスイッチ用アクチュエータ及びマイクロスイッチ
【課題】機械的に電気信号や光信号の接続、切断を行うに十分な変位発生力と量を発現することが出来、小型、耐久性、信頼性の高いマイクロスイッチ用アクチュエータを提供すること。
【解決手段】マイクロスイッチ用アクチュエータ10は、2本の脚部15a,15bと、その2本の脚部の一方の端部の側で挟まれてそれらを支持する股部17と、を備える。2本の脚部のそれぞれにおいて、積層された複数の圧電層14のうち最外層の一の圧電層14が、正極及び負極の電極層18,19で挟まれず不活性部を構成し、他の圧電層14が、正極及び負極の電極層18,19で挟まれて活性部を構成している。正極及び負極の電極層18,19間に駆動電圧を印加すると、活性部を構成する圧電層14が圧電横効果に基づく変位によって伸縮し、(不活性部を構成する圧電層14が変位を生じないことから)2本の脚部15a,15bが屈曲変位を生じる。
(もっと読む)
弾性表面波アクチュエータ
【課題】移動子を確実に移動させることができる弾性表面波アクチュエータを提供することにある。
【解決手段】弾性表面波アクチュエータは、圧電基板2、及び該圧電基板2の表面に所定距離隔てて対向配置されるとともに圧電基板2に弾性表面波を励振する一対の交差指電極3,4を備える固定子1と、圧電基板2の表面に載置されて前記弾性表面波により移動させられる移動子5と、移動子5を固定子1に所定の圧力Nで接触させる予圧手段とを具備し、一対の交差指電極3,4は、対向する交差指電極が励振する弾性表面波を前記対向する交差指電極側に反射するように構成され、同方向に進む弾性表面波は、同一の位相を有するように設定されている。
(もっと読む)
圧電超音波モーター
【課題】金属チューブの外面に圧電素子が付着された圧電超音波モーターが提供される。
【解決手段】上記圧電超音波モーターは中空形状の金属チューブと、上記金属チューブの外側面に装着される複数個の圧電素子を具備し、上記圧電素子に電気場が印加される時屈曲変形を発生させる圧電ステーターと、上記金属チューブの中空部に挿入される回転バーと、上記圧電ステーターの上面または下面と面接触するよう上記回転バーの外周面に周り方向に形成され上記圧電ステーターの屈曲変形によって回転する回転部材と、上記回転バーの一側に形成され上記回転部材の回転力を移送物に伝達する動力伝達部材を具備するローター、及び上記圧電素子の駆動に必要な電源を印加する電源印加部と、を含む。
(もっと読む)
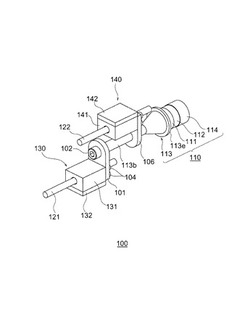
光学対物レンズ・モジュール
本発明は、光学ズームレンズ群2、焦点合わせ光学レンズ群4、及び2つのレンズ群の電気駆動機構を含み、組み合わせられた光軸が対物レンズの光軸7を形成する対物レンズ・モジュールに関する。本発明によれば、上記のレンズ群の電気駆動機構は2つのリニア形超音波モータ9、11の形態で実現され、2つの超音波モータの各々は圧電板12を含む。圧電板は2つの摩擦素子14を含み、これらの摩擦素子は対向する前面を押しつけられ、圧力素子15と一緒になって超音波モータの移動素子を形成する。移動素子の各々は、対応するレンズ群へ弾力的に接続される。超音波モータは、移動素子の変位方向が光学モジュールの光軸と平行になるように配列される。 (もっと読む)
超音波モータのステータ
【課題】ロータを直線的に相対移動させることができ、エネルギ巡回効率の良い進行波型超音波モータを提供する。
【解決手段】本発明が適用された進行波型の超音波モータのステータ21は、周回する外側面を有する環状の弾性部材21と、弾性部材21の外側面に周回する進行波を発生させる圧電素子22,3とを備えている。弾性部材21には、環状の軸方向に貫通する調整孔37が形成されている。弾性部材21の外側面には、直線状とされ、ロータ10が接触する出力面20が形成されている。このようなステータ11では、調整孔37の形状、大きさ又は位置を調整することにより、最適な進行波を発生する。
(もっと読む)
1 - 14 / 14
[ Back to top ]