
Fターム[5H680DD33]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 振動子 (4,401) | 振動子の構造 (3,460) | 配列の仕方 (696)
Fターム[5H680DD33]の下位に属するFターム
Fターム[5H680DD33]に分類される特許
1 - 20 / 44
複合振動子およびそれを用いた自在曲面装置
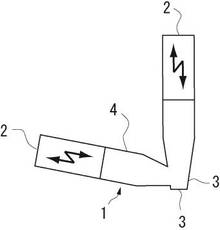
【課題】 大きな出力が得られ、性能が低下しない複合振動子を提供すること、および静粛で、電磁波を発生せず、電磁波の影響を受けず、停止時に電力を消費せず、小型化が可能で、安定感があり、通気性の良い自在曲面装置を提供する。
【解決手段】 複合振動子1は2本の振動子2が互いに90度未満の角度でコネクタ4に設置され、それぞれの振動子2の軸方向と垂直な反射面3がコネクタ4に設けられたことを特徴とする。また、自在曲面装置は複合振動子1を用いた複数の振動モータとその制御装置とを備えたことを特徴とする。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒及びカメラ

【課題】制御が簡易な圧電アクチュエータ及びそれを用いたレンズ鏡筒及びカメラの提供を課題とする。
【解決手段】第1圧電素子と、第2圧電素子と、第1の電圧の印加に応じて第1の方向に変形する前記第1圧電素子が取り付けられている第1組の第1部材と、前記第1の電圧の印加に応じて前記第1の方向と逆方向に変形する前記第2圧電素子が取り付けられている第2組の第2部材とを備える。
(もっと読む)
振動波アクチュエータ
【課題】振動体と被駆動体との接触面に対して振動体側に磁石を配置した場合に、振動体と被駆動体との間の磁気による加圧接触力を高めることが可能となる振動波アクチュエータを提供する。
【解決手段】少なくとも電気−機械エネルギー変換素子と、前記電気−機械エネルギー変換素子が接合され接触部が形成された弾性体とを有し、前記接触部に楕円運動が生成可能に構成された振動体と、
前記振動体の接触部と加圧接触し前記楕円運動によって移動する被駆動体と、を有する振動波アクチュエータであって、
前記振動体よりも剛性の低い第一の弾性部材を介して該振動体を保持する振動体保持部を備え、
前記振動体保持部に磁石が配置されると共に、前記被駆動体が磁性体で構成され、該磁石の吸引力によって前記振動体の接触部と前記被駆動体とを加圧接触させる。
(もっと読む)
超音波モータ
【課題】全体構成を簡略化することができ、かつ、配線の数を減らすことのできる超音波モータを提供する。
【解決手段】中心軸に垂直な断面が矩形状の長さ比率を有する振動子と、振動子の楕円振動発生面に接して振動子の楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータと、を少なくとも備えた超音波モータであって、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ共振振動と、を合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動検出電極層を備える。
(もっと読む)
超音波モータ
【課題】簡略な構造で組み立て容易性の高い超音波モータを提供すること。
【解決手段】中心軸に垂直な断面が矩形状を呈し、前記中心軸方向に伸縮する縦振動と、前記中心軸を捻れ軸とする捻れ振動と、が同時に励起されることで楕円振動を発生する振動子であって、前記矩形状を構成する短辺Tと長辺Wとの長さの比率が、当該振動子に励起される縦振動の共振周波数と捻れ振動の共振周波数とが略一致する値に設定された振動子40を超音波モータに具備させる。そして、振動子40に、縦振動の節部に対応する領域に形成され、当該振動子に縦振動を励起する為の第1の分極部101Lと、前記捻れ振動の腹部に対応する領域に形成され、当該振動子に捻れ振動を励起する第2の分極部101A1,101A2,101A3,101A4,101B1,101B2,101B3,101B4と、を備えさせる。
(もっと読む)
超音波モータ
【課題】圧電素子の屈曲振動を積極的に使用することによりねじれ共振振動を効率よく発生させることのできる超音波モータを提供する。
【解決手段】振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、中心軸に垂直な面内において複数の領域を有し、複数の領域は、中心軸に沿った方向における変位が隣り合う領域で互いに異なり、振動子は、その分極方向と垂直な方向に伸縮する。
(もっと読む)
超音波モータ
【課題】縦振動と屈曲振動による多重モードで駆動される超音波モータにおいてコンパクトな構成で駆動の効率的な検出および制御を可能にする超音波モータを提供する。
【解決手段】多重振動モードの振動に用いられる矩形の超音波モータであって、積層された圧電層と、積層された圧電層間に交互に内層された駆動電極およびグランド電極と、積層された圧電層のうち駆動検出に用いられるものの一方の主面側で、駆動電極4dが内層された面内に内層されたセンシング電極4eとを備え、第一次縦振動モードにおける伸縮方向の長さをLとし、第二次屈曲振動モードにおける剪断方向の長さをwとした場合、第一次縦振動モードの共振周波数と第二次屈曲振動モードの共振周波数とが実質的に一致するw/Lに基づいて形成されている。これにより、動作に寄与しない不活性層体積比率を少なくすることができる。
(もっと読む)
超音波モータ
【課題】縦振動と屈曲振動による多重モードで駆動される超音波モータにおいてコンパクトな構成で駆動の効率的な検出および制御を可能にする超音波モータを提供する。
【解決手段】多重振動モードの振動に用いられる矩形の超音波モータであって、積層された圧電層と、積層された圧電層間に交互に内層された駆動電極およびグランド電極と、積層された圧電層のうち駆動検出に用いられるものの一方の主面側で、駆動電極4dが内層された面内に内層されたセンシング電極4eとを備え、第一次縦振動モードにおける伸縮方向の長さをLとし、第一次屈曲振動モードにおける剪断方向の長さをwとした場合、第一次縦振動モードの共振周波数と第一次屈曲振動モードの共振周波数とが実質的に一致するw/Lに基づいて形成されている。これにより、圧電活性層の比率が大きくなるため効率のよい高性能の超音波モータを提供できる。
(もっと読む)
駆動装置
【課題】凝着の発生を抑制しつつ、異音の発生を抑制する
【解決手段】駆動装置1は、振動を発生させるアクチュエータ本体4とアクチュエータ本体4に設けられてアクチュエータ本体4の振動に伴って周回運動することにより駆動力を出力する駆動子3,3とを有する超音波アクチュエータ2と、駆動子3,3が当接していて、超音波アクチュエータ2に対して相対移動する移動体13とを備えている。移動体13における、駆動子3,3と当接する当接面13bは、平滑部13c,13c,…と、平滑部13cよりも凹んだ凹部13d,13d,…とが混在している。
(もっと読む)
振動アクチュエータ、レンズユニットおよび撮像装置
【課題】振動アクチュエータの効率を向上させる。
【解決手段】ロータと、ロータの回転軸の方向に、ロータに接して配されたステータと、回転軸の方向についてロータとの間でステータを挟む位置に配され、ステータに対してロータの回転軸周りに遷移する振動を付与する電気機械変換部と、回転軸の方向についてステータとの間で電気機械変換部を挟む位置に配された狭持部材と、ロータ、ステータおよび電気機械変換部に挿通され、狭持部材に結合された軸部材と、回転軸の径方向について軸部材とステータとの間に挟まれており、回転軸の方向に沿ってロータ側に延伸する振動体とを備える。
(もっと読む)
駆動装置
【課題】扁平で薄型化可能な駆動装置を提供する。
【解決手段】駆動装置10は、回転軸43に軸止される外径の異なる円盤状のローター4
1a,41b,41cを有するローター車40と、交流電圧を印加することにより面内振
動し、ローター車40を回転する板状の振動体130と、ローター41a,41b,41
cのいずれかの外周側面に振動体130を一定の付勢力で当接させる振動体付勢部材70
と、振動体130の駆動制御を行う制御回路部60と、ローター車40と、振動体130
と、振動体付勢部材70と、制御回路部60とを収納する第1機枠20と第2機枠30と
からなる筐体とを備えている。複数のローターのいずれかを選択し、振動体130を当接
させることにより、ローター車40の回転速度を切換えることができる。
(もっと読む)
圧電モータ
【解決手段】圧電モータは、対向した前面部と後面部及び対向した第1の端面部と第2の端面部を持つ圧電共振子本体を含む。前面部(17)及び前記後面部(18)は、圧電共振子本体の第1の縦軸(15)及び第2の縦軸(16)と実質的に平行である。また端面部(2)は、前記第1の縦軸と実質的に垂直であり、前記第2の縦軸と実質的に平行である。そして、端面部は圧電共振子本体の長さ(L)により区分けられる。前記モータはまた、前記後面部上に配置された共通の電極(6)を少なくても1個含み、さらに長さLに沿って延びている2つの対称的な列で、長さLに沿って前記前面部にわたって配置された励起電極(7−12)を少なくても6n(nは整数で1以上)個含む。前記モータで、前記圧電共振子はLに沿ったn次の縦振動周波数(ν1)とLに沿った3n次の曲げ振動周波数(ν2)を有し、ここで縦振動周波数ν1と曲げ振動周波数ν2は実質的に等しい。 (もっと読む)
超音波モータ
【課題】板状圧電素子及び振動子の製造が容易で、製品の性能ばらつきが小さい超音波モータを提供すること。
【解決手段】縦・捻じり振動方式の超音波モータに次の振動体を具備させる。前記振動体は、板状圧電素子4a21を積層して形成された圧電層部4a2と、積層方向に対して垂直な面と所定の角度θを為す第1の傾斜面を備え、該第1の傾斜面全面で前記圧電層部4a2の一方端面と接する第1の弾性体4a1と、前記第1の傾斜面と平行な第2の傾斜面を備え、該第2の傾斜面全面で前記圧電層部4a2の他端面と接する第2の弾性体4a1’と、を具備し、前記板状圧電素子4a21は、外形面に対して垂直を為す面に電極膜を備え、前記圧電層部4a2には前記板状圧電素子4a21の積層方向に沿って貫通孔Hが設けられ、前記第1の弾性体4a1及び前記第2の弾性体4a1’には前記傾斜面に対して前記角度θを為す面に対して垂直な方向に沿って貫通孔H’が設けられている。
(もっと読む)
回転駆動される球体の姿勢を制御する装置及び方法
【課題】広い可動範囲で圧電素子により回転駆動される球体の姿勢を制御する方法及び装置を提供することにある。
【解決手段】回転駆動される球体100の姿勢を制御する方法及び装置においては、3個の圧電素子n1、n2、n3で構成される3組のアクチュエータユニットau1、au2、au3を備え、各圧電素子n1、n2、n3に駆動信号が印加されて各アクチュエータユニットau1、au2、au3が駆動され、球体100の姿勢が制御される。球体100の現姿勢と目標姿勢とから球体100を回転させる回転軸が決定され、予め位相の組み合わせを記述した位相差テーブル115Aが参照されて駆動信号に付加する位相が決定される。位相の異なる駆動信号が各圧電素子n1、n2、n3に印加され、各アクチュエータユニットau1、au2、au3が駆動されて球体100が目標姿勢に制御される。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、該縦振動と該ねじれ振動を合成することにより楕円振動を形成し、該楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が矩形状の長さ比率を有する振動子である圧電素子11と、該圧電素子11の楕円振動発生面に接して振動子の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ16と、を少なくとも備えている。そして、上記圧電素子11の回転軸方向に伸縮する縦1次共振振動と、上記回転軸をねじれ軸とするねじれ2次共振振動とを合成することにより、上記楕円振動を形成する。
(もっと読む)
慣性駆動アクチュエータ
【課題】構造を複雑化させることなく、XY平面内の所望の方向へ移動体を移動させることができる慣性駆動アクチュエータを提供する。
【解決手段】一端が固定部材に隣接し、他端に変位が発生する変位発生手段と、変位発生手段を変位させるための電圧を印加する駆動手段と、変位発生手段の他端に接し、変位方向へ変位可能な振動基板と、振動基板に設けられた振動基板電極と対向するように配置され、慣性により振動基板に対して移動する移動体と、移動体と振動基板との間の摩擦力を変化させる摩擦制御手段と、を備え、移動体が振動基板の変位方向、又は、この変位方向とは異なる方向へ移動するように、固定部材及び振動基板の少なくとも一方に移動体の移動を規制する規制部材を設ける。
(もっと読む)
超音波モータ
【課題】温度変化及び負荷変化等が生じた場合であっても最適な駆動周波数で駆動可能であり、且つ単純な構造でコストダウン及び小型化可能な超音波モータを提供すること。
【解決手段】棒状弾性体11の側面において対向して配置された2個の積層型圧電素子13の伸縮振動を利用して棒状弾性体11に縦振動と捻じれ振動とを同時に励起して棒状弾性体11の端面に設けられた摩擦子15に楕円運動を励起させてロータを回転させる超音波モータ1における前記積層型圧電素子13を、第1圧電板31と第2圧電板32とを交互に積層して構成する。ここで、前記第1圧電板31は、複数個に分割され且つ各々の分割領域が当該圧電板31の周縁部へ露出している第1内部電極A+,B+を備え、前記第2圧電板32は、前記第1内部電極A+,B+とは逆の極性の内部電極であって複数個に分割され且つ各々の分割領域が当該圧電板の周縁部へ露出している内部電極A-,B-を備える。
(もっと読む)
超音波モータ装置
【課題】小型化を図ると共に、効率が高く、構造が簡単であり、精度の高い動作を行なう。
【解決手段】圧電振動子1が第一次縦振動モードで振動する際の伸縮方向の長さをLとし、圧電振動子1が第一次屈曲振動モードで振動する際の剪断方向の長さをwとした場合、圧電振動子1は、前記w/Lの値が実質的に1.05となるように形成されており、圧電振動子1のいずれか一方の主面上に並設された2枚の電極4a、4bと、2枚の電極4a、4bのうち、少なくとも一方に対して交流電圧を印加して圧電振動子1を駆動させる共振駆動装置32と、2枚の電極4a、4bのうち、少なくとも一方に対して直流電圧を印加して圧電振動子1を駆動させる直流駆動装置33と、共振駆動装置32または直流駆動装置33のいずれか一方を選択して動作させる制御部34と、を備える。
(もっと読む)
圧電アクチュエータ
【課題】圧電アクチュエータの駆動効率を簡易な構成で向上させることにある。
【解決手段】立方体形状のステータ11には軸方向に貫通する貫通孔12が形成されており、貫通孔12には直進往復動自在にシャフト13が装着される。ステータ11のそれぞれの外周面には振動源である圧電セラミックス14が設けられて、圧電セラミックス14の外面に軸方向に2つの電極15,16が形成されるとともに、圧電セラミックス14の内側がステータ11を介して接地される。それぞれの電極15,16に相互に位相の異なる交流電圧が印加されると、貫通孔12の内周面に軸方向の楕円運動が形成されてシャフト13が軸方向に摩擦駆動される。シャフト13には中心方向に切り込まれたスリット23が形成されており、このスリット23がシャフト13の外周面とステータ11の内周面との摩擦接触圧を設定する設定部となっている。
(もっと読む)
アクチュエータ、位置決め装置
【課題】 移動ストロークが大きく、かつ、簡単な構造で装置の低背化が可能な、X−Y方向の2次元に移動可能なアクチュエータを提供する。
【解決手段】 略直方体の磁石と該磁石の直交する2面の各々に電気機械変換素子の変位方向の一端が固定されてなる駆動体と、該電気機械変換素子の変位方向の他端が固定されている被駆動部材と、該磁石に対して磁力によって吸着可能な固定部材とから構成され、前記電気機械変換素子の伸びと縮みの速度を異ならせて振動させることにより、前記被駆動体と前記駆動体とを固定部材に対して移動させる。
(もっと読む)
1 - 20 / 44
[ Back to top ]