
Fターム[5H680DD62]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 移動子と振動子との関係 (1,736) | 移動子と振動子との押圧形態 (901)
Fターム[5H680DD62]の下位に属するFターム
Fターム[5H680DD62]に分類される特許
1 - 20 / 46
振動型駆動装置とその移動体の製造方法
【課題】低コスト化、高精度化を図ることが可能となる振動型駆動装置とその移動体の製造方法を提供する。
【解決手段】電気−機械エネルギー変換素子への交流電圧の印加により振動子に楕円運動を励振させ、振動子と接触する移動体を相対移動させる振動型駆動装置であって、
移動体は、本環部と複数の板ばね部とを備え、
複数の各板ばね部は、該板ばね部と本環部を接合する固定部と、振動子と接触する接触部と、接触部と固定部を連結する連結部と、を有し、
接触部に振動子が接触して連結部が変形した際に、板ばね部に所定のバネ剛性を持たせるように、本環部と接触部との間に空間部を設けて複数の板ばね部が固定部を介して本環部と接合される。
(もっと読む)
注入機器及び超音波モータの制御方法

【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
レンズ鏡筒及び撮像装置
【課題】ウォブリング動作における静寂性を向上させたレンズ鏡筒及び電子カメラを提供する。
【解決手段】レンズ鏡筒は、被写体の像を合焦させる合焦用レンズを駆動する振動アクチュエータと、前記振動アクチュエータに増幅した一対の駆動信号を印加する増幅部と、前記一対の駆動信号の位相差を変更する移相部と、前記振動アクチュエータの駆動を指示する信号が入力されると、前記一対の駆動信号の位相差を周期的に変化させる動作を前記移相部に行わせる第1処理を実行する制御部とを備える。
(もっと読む)
振動型駆動装置
【課題】部品点数及び必要スペースの増加を抑制することができ、振動子と被駆動体との摩擦面における安定した接触状態を維持することが可能となる振動型駆動装置を提供する。
【解決手段】摩擦面が形成された振動体と電気−機械エネルギ変換素子とを有する振動子と、振動子の摩擦面と接触する摩擦面が形成され、これらの互いの摩擦面を介して押圧されるように構成された被駆動体と、を備え、
互いの摩擦面を介して振動子の楕円運動によって被駆動体を相対移動させる振動型駆動装置であって、
振動子を支持する弾性変形部を有する支持部材を備え、
支持部材は、振動子が被駆動体を相対移動させる方向及び押圧される方向と直交する方向である第一の方向に力を受けた際、
第一の方向への変形を伴わない弾性変形部の回転変形によって、振動子の摩擦面を被駆動体の摩擦面に対し平行に変位させることが可能に構成されている。
(もっと読む)
圧電アクチュエーター、ロボットハンド及びロボット
【課題】圧電アクチュエーターの駆動効率を向上する。
【解決手段】回転軸rを有するローター5と、ローター5に当接する摺動部33と、摺動部33に楕円振動を励起する圧電素子30と、圧電素子30に積層された振動板31と、摺動部33の中心軸79を、回転軸rに垂直な面方向において、楕円振動の回転方向に応じて、回転軸rと交差する状態からシフトすることを許容する移動機構3と、を少なくとも有することを特徴とする圧電アクチュエーター。
(もっと読む)
超音波アクチュエータ
【課題】複数の振動子間の調整が不要であり、小型でありながら強い発生力を有するリニア型超音波アクチュエータを提供する。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された移動体と、駆動部に結合され、移動体に対する把持力を調整可能に構成された伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、を備える。
(もっと読む)
超音波アクチュエータ
【課題】複数の振動子間の調整が不要であり、小型でありながら強い発生力を有するリニア型超音波アクチュエータを提供する。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された移動体と、駆動部に結合され、移動体に対する把持力を調整可能に構成された伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、駆動部と伝達部を機械的及び音響的に互いに連結する連結部と、を備える。
(もっと読む)
超音波モータ
【課題】組み立て容易性が良好な超音波モータを得る。
【解決手段】楕円振動が励起される積層圧電素子40と、前記楕円振動を駆動源として回転駆動されるロータ機構部10と、積層圧電素子40をロータ機構部10に圧接させる押圧機構部20と、フレーム30と、フレーム30のうち積層圧電素子40に対向する面に設けられ、振動子40をその厚み方向においてフレーム30と共に挟持する挟持部51s1−1〜4および51s2−1〜4と、を超音波モータに具備させ、前記フレーム30及び前記挟持部51s1−1〜4および51s2−1〜4のうち少なくとも一方は、積層圧電素子40の厚み方向について弾性力を有し、前記挟持部51s1−1〜4および51s2−1〜4は、フレーム30と積層圧電素子40とに対して圧接している。
(もっと読む)
振動波アクチュエータ
【課題】振動体と被駆動体との接触面に対して振動体側に磁石を配置した場合に、振動体と被駆動体との間の磁気による加圧接触力を高めることが可能となる振動波アクチュエータを提供する。
【解決手段】少なくとも電気−機械エネルギー変換素子と、前記電気−機械エネルギー変換素子が接合され接触部が形成された弾性体とを有し、前記接触部に楕円運動が生成可能に構成された振動体と、
前記振動体の接触部と加圧接触し前記楕円運動によって移動する被駆動体と、を有する振動波アクチュエータであって、
前記振動体よりも剛性の低い第一の弾性部材を介して該振動体を保持する振動体保持部を備え、
前記振動体保持部に磁石が配置されると共に、前記被駆動体が磁性体で構成され、該磁石の吸引力によって前記振動体の接触部と前記被駆動体とを加圧接触させる。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置
【課題】高トルクを発生させることができるモータ装置を提供すること。
【解決手段】回転子と、当該回転子を回転させるモータ本体と、回転子の外周の少なくとも一部に掛けられた接触部材と、回転子と接触部材との間を接触状態として接触部材を一定距離移動させると共に接触状態を解消した状態で接触部材を所定の位置に復帰させる駆動部と、を有するブレーキ装置と、を備える。
(もっと読む)
振動波駆動装置
【課題】磁力を用いた加圧構造のリニア型超音波モータを構成するに当たり、加圧力の偏りが生じることを抑制することができ、出力性能の安定化と耐久性の向上を図ることが可能となる振動波駆動装置を提供する。
【解決手段】電気−機械エネルギー変換素子と接触部とを有する振動子と、接触部と加圧接触する被駆動体とを備え、
電気−機械エネルギー変換素子への印加によって接触部に楕円運動を生じさせ、接触部と加圧接触する被駆動体を前記振動子に対して相対移動させる振動波駆動装置であって、
被駆動体は、第一の磁力発生部を備えると共に、
振動子は、相対移動の方向と直交する方向において第一の磁力発生部の幅より狭い範囲に第二の磁力発生部を備え、
被駆動体の前記接触部との加圧接触が、第一の磁力発生部と第二の磁力発生部との間で発生する磁気吸引力により行われる構成を有する。
(もっと読む)
電気機械モータに対する法線力の付与
電気機械モータ組立体(1)は、ステータ(30)と、移動対象体(10)と、ステータ支持部(35)とを備える。ステータ(30)は、常に電気機械アクチュエータ(20)のうちの少なくとも1つを確実に対象体(10)と非スライド方式で接触させるステップの反復により対象体(10)を移動させるように構成された複数の電気機械アクチュエータ(20)を有する。組立体は、さらに、少なくとも1つのバネ構成部(42)により、ステータとステータ支持部との間に法線力(N)を加える加力構成部(40)を備える。バネ構成部(42)は、対象体(10)の表面(5)に対する法線方向(Z)に、法線力(N)と、対象体(10)の表面(5)の平均高さ不確定性との比の5%未満となる低いバネ定数を有する。加力構成部(40)は、さらに、主運動方向(X)に平行で、かつ、対象体(10)の表面(5)に対して並置された状態で、ステータ(30)とステータ支持部(35)との間に取り付けられた横固定板(46)を備える。 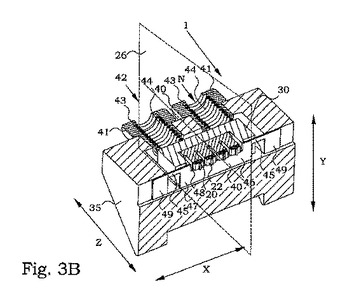 (もっと読む)
(もっと読む)
駆動装置
【課題】凝着の発生を抑制しつつ、異音の発生を抑制する
【解決手段】駆動装置1は、振動を発生させるアクチュエータ本体4とアクチュエータ本体4に設けられてアクチュエータ本体4の振動に伴って周回運動することにより駆動力を出力する駆動子3,3とを有する超音波アクチュエータ2と、駆動子3,3が当接していて、超音波アクチュエータ2に対して相対移動する移動体13とを備えている。移動体13における、駆動子3,3と当接する当接面13bは、平滑部13c,13c,…と、平滑部13cよりも凹んだ凹部13d,13d,…とが混在している。
(もっと読む)
超音波モータ駆動装置
【課題】被駆動体に搭載物を追加しても超音波振動子にかかる押圧力を一定に保つことを可能とし、これにより動作が安定した超音波モータ駆動装置を提供する。
【解決手段】縦振動と屈曲振動を同時に励振して楕円振動を発生させ、楕円振動を駆動力とする、ベース部材上に設けられた超音波振動子を有する超音波モータ駆動装置であって、被駆動体と、被駆動体と対向するように超音波振動子に設けられ、被駆動体と接触し被駆動体を変位平面内の任意の方向に駆動させる駆動子と、超音波振動子と被駆動体との間に作用する押圧力を検出する押圧力検出部と、押圧力検出部による検出結果に基づき押圧力を所定の押圧力に調節する押圧力調整部と、を備え、ベース部材と被駆動体がシャフトにより機械的に連結されている。
(もっと読む)
モータ装置、回転子の駆動方法及び軸部材の駆動方法
【課題】高トルクを発生させることができる、小型のモータ装置、回転子の駆動方法及び軸部材の駆動方法を提供すること。
【解決手段】第1部材と、前記第1部材を取り囲んで設けられる第2部材と、前記第1部材に接続され、前記第2部材の内面の少なくとも一部に対して当接状態及び離間状態とすることが可能に設けられた伝達部材と、前記伝達部材に接続され、前記伝達部材を前記当接状態として前記第1部材及び前記第2部材のうち少なくとも一方に回転力を付与する駆動部とを備える。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法および電子機器
【課題】高効率な駆動を実現することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】駆動信号の周波数として縦振動と反共振動の共振周波数を有する圧電素子を備える圧電アクチュエーターを以下のように駆動制御する。先ず、駆動開始時は初期駆動制御モードで駆動を制御し、その後、被駆動体のローターが所定量駆動するまでは定常駆動制御モードに切り替えて駆動を制御する。定常駆動制御モードでは、ローターの振動状態に基づいて周波数制御される駆動信号を圧電素子に印加し、かつ、定常駆動制御モードでの駆動を終了する際にその時の駆動信号の周波数を次回駆動時の駆動周波数f0として記憶する。初期駆動制御モードでは、初めに圧電素子に駆動周波数f0よりも低い固定周波数fr1の駆動信号を印加し、その後、予め設定されたタイミングで、駆動周波数f0に固定された駆動信号を印加する。
(もっと読む)
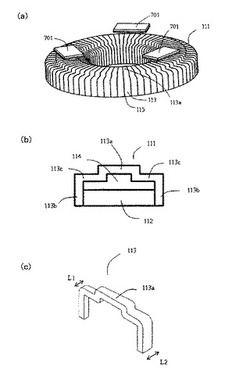
圧電振動子、その製造方法及び圧電振動子を有する線形アクチュエータ
【課題】小型で製造が容易で、かつ大量生産が可能な圧電振動子を提供する。
【解決手段】圧電素子の積層方向に対して上下及び左右に分離した複数個の震動部を有する圧電体と、各々の圧電素子間の圧電素子面に形成され、圧電素子面を左右方向に複数個に分割し、その一端が圧電素子の外側まで延長される複数個の電極端子及び電極端子が形成された圧電素子と隣り合う圧電素子の面に形成された複数個の電極端子と対応するように形成された複数個のジャンプ端子を有する内部電極パターンと、圧電体の側面に形成され、複数個の震動部のうち相互対角線方向に位置した震動部に同時に電源を印加するよう、各々の震動部及びその対角線方向に位置した震動部に対応する各々の電極端子とこれに対応するジャンプ端子を連結する複数個の側面電極を有する外部電極パターンと、圧電体の一側に形成されて震動部で発生した震動を外部に伝達する動力伝達部材とを含む圧電振動子が提供される。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、トルクや回転速度などの回転特性を可変可能な圧電モーター、液体噴射装置及び時計を提供する。
【解決手段】圧電体層40と該圧電体層40を挟んで両側にそれぞれ設けられた第1電極50及び第2電極60とを有する圧電素子30と、圧電素子30が固定される振動部材20と、を有する圧電アクチュエーター10と、前記振動部材20の長手方向の一端部に設けられた当接部21が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸3に向かって付勢する付勢手段80と、を具備する圧電モーター1であって、前記回転軸3の前記当接部21が当接する領域が、前記圧電素子30と前記振動部材20の積層方向に対して傾斜した傾斜面3aとなっており、前記圧電素子30に駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部を有する。
(もっと読む)
圧電駆動装置、圧電駆動方法および電子機器
【課題】圧電アクチュエーターの起動時の効率を大幅に向上することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】圧電駆動装置は、圧電アクチュエーターと、駆動制御手段とを備える。駆動制御手段は、圧電アクチュエーターの起動初期に行う初期駆動制御と、初期駆動制御後に行う定常駆動制御S5とを実行する。初期駆動制御では、圧電素子に初期駆動信号を印加する初期駆動信号印加制御S1を実行後、圧電素子に駆動信号を印加しない非印加制御S2を実行する。初期駆動信号印加制御から非印加制御に切り替えるタイミングは、初期駆動信号の印加による被駆動体の動作が開始されるまでに設定し、初期駆動制御から定常駆動制御に切り替えるタイミングは、初期駆動信号の印加による被駆動体の動作開始時以降でかつ被駆動体の動作停止時および/または前記圧電素子の放電完了時までに設定する。
(もっと読む)
振動波モータ用の負荷トルク変動装置及び画像形成装置
【課題】 ロータに設けられる回転部材に機構的な特徴を加えてロータ及びステータに同じ接触状態が続くことを回避することで偏磨耗を抑制し、振動波モータの長寿命化を実現する。
【解決手段】 振動波モータMで回転するシャフト405に設けられ、シャフト405に掛かる負荷トルクの大きさをシャフト405の回転位相で変動させる偏心カム1302、アーム1303、付勢バネ1402と、シャフト405に掛かる負荷トルクの周期をシャフト405の回転周期に対して変動させるワンウェイクラッチ1301と、を備える振動波モータ用の負荷トルク変動装置500を構成した。
(もっと読む)
1 - 20 / 46
[ Back to top ]