
Fターム[5J062AA02]の内容
Fターム[5J062AA02]に分類される特許
101 - 120 / 251
測位方法、プログラム、測位装置及び電子機器
【課題】カルマンフィルタを用いた測位処理で使用する測定誤差を適切に設定すること。
【解決手段】GPS衛星からのGPS衛星信号を捕捉する捕捉処理が実行されて距離相当
値が測定される。また、捕捉したGPS衛星信号の信号強度に基づいて当該捕捉衛星につ
いての位置補正処理で用いる位置R値の初期値が設定されるが、当該捕捉衛星の観測値「
Z」が、GPS衛星からのGPS衛星信号の受信環境に基づいて設定された適否判定条件
により不適と判定される場合は、位置補正処理で用いる位置R値が初期値より大きな値に
設定される。
(もっと読む)
無線位置決定システムにおける時間取得

【課題】無線装置のGPS信号取得時間を低減する。
【解決手段】無線装置は、基準信号を受信し、受信した基準信号の断片を抽出し、断片のための受信の時刻を決定し、断片と受信の時刻を、GPS補助情報のための要求の一部として位置決定エンティティに送信する。位置決定エンティティは、受信の関連する時刻とともに基準信号を連続的に受信し記憶し、および無線装置から送られた断片とタイムスタンプを受信する。位置決定エンティティは、さらに、信号断片を記憶された基準信号の一部にマッチさせ、タイムスタンプと、記憶された基準信号のマッチした部分の受信の時刻との間のタイムオフセットを決定し、無線装置のための補助情報を作成し、タイムオフセットを用いて補助情報を無線装置に同期させ、同期された補助情報を無線装置に送信する。無線装置は、受信したタイミング情報を含む補助情報で、GPS信号を取得する。
(もっと読む)
測位装置、測位システム、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、測位システム、コンピュータプログラム及び測位方法を提供する。
【解決手段】測位装置10は、衛星からの搬送波位相及び擬似距離を測定し、アンビギュイティの初期値を算出し、算出した初期値を用いて解の候補を推定する。測位装置10は、自身の概略の水平位置(緯度、経度)とその水平位置での道路の高度情報により測位装置10の高さ位置(より正確には衛星信号の受信用アンテナの高さ位置)の範囲を設定し、各衛星からの搬送波位相が等しい等位相の多数の交点(解の候補)の中から、設定した範囲内にある解の候補に限定した上で真の解であるか否かの検定を行う。
(もっと読む)
時間測定に基づく衛星測位システムのための方法および装置
【課題】GPS信号を検索し、受信器の位置(および正確な時刻)を計算する処理は、時間がかかり、数分を要し、衛星信号がブロックされる多くの状況では、GPS衛星から受信された信号のレベルが低すぎて、誤りなしに衛星データ信号を復調し、読み取ることが不可能である。そのような読み取りが不可能または非実用的である時に時刻の曖昧さを解決するための代替アプローチの提供。
【解決手段】衛星データ・メッセージの少なくとも一部を移動SPS受信器内で受信するステップと、前記衛星データ・メッセージの前記少なくとも一部の第1記録を判定するステップと、前記第1記録が何時前記移動SPS受信器で受信されたかを示す時刻を判定するために前記移動SPS受信器から前記第1記録をリモート基地局に送信するステップとを含み、判定された時刻が前記移動SPS受信器の位置を判定するのに使用される、方法。
(もっと読む)
移動無線ネットワークにおける動的な測位要求処理
ワイヤレス・ネットワークにおける移動局の位置データを通信するため、位置データを強化するため、支援データを最適に通信するため、および/または測位要求メッセージのリビッドを低減するためのシステム、デバイス、および方法の実装。 (もっと読む)
車両位置・方位修正方法及び車両位置・方位修正装置
【課題】GPS受信可能になってから短時間で車両位置、車両方位を正しい位置、方位に修正する車両位置・方位修正方法及び修正装置を提供する。
【解決手段】GPS受信機と自律航法センサーを併用するナビゲーションシステムにおいて、車両位置・方位修正部は、ナビゲーション制御停止時における車両位置と車両方位を保存し、これらをナビゲーション起動時における車両の初期位置と初期方位とする。そして、ナビゲーション起動後、自律航法センサーから得られるセンサー出力信号と、前記車両初期位置と初期方位とを用いて車両位置と方位を推測すると共に、GPS受信機より得られるGPS方位の信頼度が高くなったか監視する。GPS受信機より得られるGPS方位の信頼度が高くなったとき、車両位置・方位修正部は、該GPS方位と推測した車両位置を用いて車両の現在位置を修正する。
(もっと読む)
位置測定方法
【課題】 設置位置が既知の基地局と、設置位置が不明の基地局との間で電波が届かない場合でも、設置位置が不明の基地局の設置位置を測定することのできる位置測定方法を提供することを目的とする。
【解決手段】 移動自在な移動局Pが位置P1,P2にあるときにそれぞれ実行される、設置位置が既知の基準局R1,R2および位置が不明の測定対象基地局B1のそれぞれと移動局Pとの間で無線測距信号を送受信し、基準局R1,R2と移動局Pとの間の複数の距離情報に基づいて移動局Pの位置を求めるとともに、測定対象基地局B1との間の距離を求める第1ステップと、上記第1ステップが複数回実行された後に実行される、複数回の第1ステップで求められた、移動局Pの複数の位置情報および移動局Pと測定対象基地局B1との間の複数の距離情報に基づいて測定対象基地局B1の設置位置を求める第2ステップとを有する。
(もっと読む)
測位衛星信号の捕捉方法及び測位装置
【課題】無線通信網が圏外などの理由で現在位置が不明な場合においても迅速に測位を行うことができる測位衛星信号の捕捉方法及び測位装置を提供する。
【解決手段】照度計測部11によって現在地が昼か夜かを推定し、更にリアルタイムクロック発生部1031からの時間情報から地球上の概位置を検出する。そして、サーチ衛星決定部13が時間情報、航法衛星データ、概位置の緯度経度情報を基に移動通信端末1の天空にある複数の衛星の衛星番号を導出し、これら衛星番号とあわせて衛星サーチを実施するためのサーチ情報(各衛星の周波数情報・位相情報)を受信制御部1034に与え、これが各衛星番号とGPS信号受信部1035が衛星をサーチ・捕捉を実施するための周波数、位相制御信号を与え、GPS信号受信部1035がGPSアンテナ104を通じて複数の衛星からの測位衛星信号を複数のチャンネルで受信し、測位衛星信号の周波数・位相サーチを実施する。
(もっと読む)
携帯情報端末、RFID取引端末、位置特定方法および位置特定プログラム
【課題】 本発明は、GPS機能を搭載した携帯情報端末の位置特定に関し、より詳細には携帯情報端末に搭載したRFIDチップを商取引利用した場合に、RFID取引端末からアシストデータが書き込まれ、そのアシストデータを用いて携帯情報端末の位置を特定する携帯情報端末に関するものである。
【解決手順】 本発明の携帯情報端末は、RFID取引端末と商取引が行われた際に、アシストデータとRFID取引端末の設置位置と書込み時刻、GPS衛星電波受信の良否を示す設置環境情報とがRFIDチップに書込まれ、利用者からの測位要求基づいて書込み時刻からの経過時間を求め、経過時間が所定の時間内で設置環境情報がGPS衛星電波受信不良であるとき設置位置を現在位置とし、GPS衛星電波受信良好であるとき、取得したアシストデータを用いてGPS機能により現在位置を算出し表示する、よう構成する。
(もっと読む)
無線測位システム
【課題】無線測位システムを設置する作業者の負担を軽減させ、環境が変化した場合であっても精度よく移動端末の位置座標を測位すること。
【解決手段】無線測位システムは、初期設定時において、位置座標が未知の基地局が存在する場合にでも、計算サーバ200が、位置座標が既知の基地局と位置座標が未知の基地局との間で双方向通信を行って各基地局間の距離を求め、基地局の位置座標を算出する。そして、基地局が位置座標が既知の基地局にて移動端末80から送信される送信パルスを受信し、受信時刻の差から移動端末80の位置座標を算出する。
(もっと読む)
測位誤差発生判定方法、測位位置出力制御方法、測位方法、プログラム、記憶媒体及び測位装置
【課題】測位演算において測位誤差が発生したか否かをより正確に判定すること。
【解決手段】GPS衛星SからのGPS衛星信号に基づいて測位演算により測位された測位位置の変化と、各測位演算時点で無線LAN基地局であるアクセスポイントAPから受信されたビーコン信号の変化とに基づいて、測位誤差の発生が判定される。具体的には、同一のアクセスポイントAPからのビーコン信号の連続受信が検出され、且つ、前回測位位置と最新測位位置間の距離が無線LAN信号到達距離より大きい場合に、測位誤差が発生していると判定され、最新測位位置ではなく前回測位位置が出力される。
(もっと読む)
位置検出装置及び位置検出方法
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
移動体用測位装置及び移動体用測位方法
【課題】マルチパス発生時にも精度良く測位すること。
【解決手段】本発明による移動体用測位装置は、擬似距離算出手段203と、衛星と移動体との間の距離の初期値に、衛星電波の観測値から求まる衛星と移動体の間の距離の変化量(以下、距離変化量という)を積算して、衛星と移動体との間の距離を算出する衛星移動体間距離算出手段212と、前記擬似距離算出手段による第1距離算出モードと前記衛星移動体間距離算出手段による第2距離算出モードとを切り替えるモード切替手段208と、衛星電波の直接波とその反射波とからなる合成波の受信を検出する合成波検出手段206とを備え、前記モード切替手段は、前記合成波検出手段により前記合成波の受信が検出された場合に、前記第1距離算出モードから前記第2距離算出モードに切り替えることを特徴とする。
(もっと読む)
携帯端末装置、その高度等の計測方法、その計測プログラム、及びその計測プログラムを格納した記録媒体
【課題】人工衛星の電波を用いる測位に関し、衛星電波の受信可能な衛星数が少ない場合にも測位性能を向上させ、測位時間を短縮することにある。
【解決手段】通信機能を備える携帯端末装置(4)の高度又は測位を算出する構成であって、携帯端末装置の位置で検出した気圧情報又は携帯端末装置で外部から取得した気圧情報と概略位置情報とを用いて携帯端末装置の概略位置における基準気圧を算出し、この基準気圧と携帯端末装置の位置での検出気圧とを用いて携帯端末装置の前記概略位置の高度を算出している。また、この高度と外部から取得した測位情報とにより、携帯端末装置に測位情報を提供する。このような構成により、衛星電波の受信可能な衛星数が少ない場合にも測位性能を向上させ、測位時間を短縮することができ、また、簡便で精度の高い高度値の算出を可能にしている。
(もっと読む)
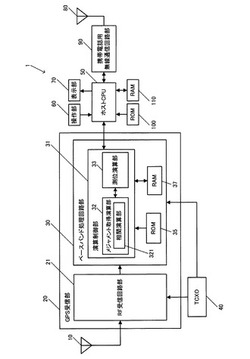
現在位置推定方法、測位方法、プログラム及び移動体端末
【課題】移動体端末が停止している場合であっても、現在位置を正しく推定すること。
【解決手段】測位部であるGPS受信部10の測位終了の際に、最後に測位された測位位置を最新測位位置とし、その際に携帯電話用無線通信回路部70により無線通信されていた基地局(停止時基地局)の識別情報(ID)の組合せがフラッシュROM80に記憶される。そして、GPS受信部10の測位再開の際に、携帯電話用無線通信回路部70により無線通信されている基地局の組合せと、フラッシュROM80に記憶されている停止時基地局の組合せとが比較判定され、一致すると判定された場合に、フラッシュROM80に記憶されている最新測位位置が携帯型電話機1の現在位置と推定される。そして、推定された現在位置が初期位置とされて、測位再開の最初の測位に利用される。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる誤差を適切に反映させた重み付け測位演算を行うこと。
【解決手段】本発明による移動体用測位装置は、移動体の停止中に取得される前記位相の観測値を用いて、移動体の停止中における衛星と移動体の間の擬似距離を、衛星毎に計測する擬似距離計測手段と、移動体の停止中における複数の時点で前記擬似距離計測手段により計測された擬似距離に基づいて、該計測された擬似距離の誤差を表わす指標値を、衛星毎に算出する誤差指標値算出手段と、前記誤差指標値算出手段により算出された衛星毎の誤差指標値に基づいて、衛星毎の重み付け係数を決定する重み係数決定手段と、移動体の移動中に取得される前記位相の観測値を用いて、前記重み係数決定手段により決定された衛星毎の重み付け係数を用いた重み付け測位演算により、移動中の移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
クライアントシステム、ネットワークシステム及び測位方法
【課題】 ノンプリアンブルフレーム同期
【解決手段】 ナビゲーション衛星受信機は、ネットワークでアクセス可能な基準局を利用してパターンマッチング用のナビゲーションデータサブフレームをネットワーククライアントで保持する。もしくは、バイトあたりの通信コストが高価な場合にはサーバがパターンマッチングを実行する。保持されたナビゲーションデータには30秒置きに軌道暦情報が、そして12.5分置きに完全な衛星暦情報が繰り返されている。これにより、クライアントは受信したデータがナビゲーションデータシーケンスの中のどこにあるか即時に認識することができるので、TLMワードのプリアンブルを待たなくていい。従って、初期定点化時間を高速にする際、貴重な数秒の節約になる。
(もっと読む)
測位方法
【課題】 GPS受信機用リアルタイムクロック
【解決手段】 ナビゲーション衛星受信機は、GPSシステムの高精度の時間ベースに対してスレーブとなることができるリアルタイムクロックを備える。そういう時に、補正量及び動作温度が観測される。後でリアルタイムクロックがGPSの時間ベースのスレーブになれなくなると、周波数エラーに最も影響するのは動作温度であると想定している。受信機のパワーダウン時でも、リアルタイムクロックは通電状態に保たれる。自走周波数は温度補正される。次回受信機をパワーアップすると、他の受信機の初期化処理に使用できるように一日の誤差が1ミリ秒以下の精度の時刻を即時に得ることができる。
(もっと読む)
GPS受信器
【課題】本発明は、RTC回路を用いることなく、ローカル時間基準を計算することができ、不揮発性記憶ユニットを用いてバックアップ航法データ格納するGPS受信器を提供し、前記ローカル時間基準およびバックアップ航法データは、GPS受信器のTTFFを低減するために使用される。
【解決手段】本発明のGPS受信器は、不揮発性記憶ユニットと測位ユニットとを備える。測位ユニットは、不揮発性記憶ユニットからバックアップ航法データを読み出し、GPS受信器の電源が投入された後にローカル時間基準を計算する機能を有する。測位ユニットは、更に、バックアップ航法データとローカル時間基準を用いて、GPSの位置を計算する機能を有する。
(もっと読む)
測位方法及び測位システム
【課題】
可能な限り高精度な移動通信端末装置の現在位置の測位結果を迅速に取得する。
【解決手段】
移動通信端末装置102が、通信中の基地局の識別子を指定して、GPS衛星の捕捉用情報の要求である第1アシスト要求を行うと、アシストサーバ50は、捕捉用情報とともに該基地局の位置情報を導出し、移動通信端末装置102へ向けて送信する。次に、移動通信端末装置102が、受信した捕捉用情報に基づいて捕捉されたGPS衛星との間の距離の計測結果を指定して、現在位置の算出要求である第2アシスト要求を行うと、アシストサーバ50は、移動通信端末装置102の現在位置を算出し、算出結果を移動通信端末装置102へ報告する。この報告を受けた移動通信端末装置102は、当該報告が算出成功の結果であったときには当該算出結果を、当該報告が算出失敗の結果であったときには基地局の位置を測位結果とする。
(もっと読む)
101 - 120 / 251
[ Back to top ]