
Fターム[5J062AA02]の内容
Fターム[5J062AA02]に分類される特許
121 - 140 / 251
衛星ナビゲーションデータのサブフレームを収集する方法及び装置
【課題】 衛星通信の初期測位時間(TTFF)性能を改善するため、衛星ナビゲーションデータのサブフレームを収集する方法を提供する。
【解決手段】 方法は、(a)複数のサブユニットに分けられるワードを備えたサブフレームを受信するステップと、(b)各サブユニットが有効か否かを検査するステップと、(c)有効なサブユニットから所要のサブユニットを収集するステップと、(d)上記サブフレームの所要のサブユニットが収集されたか否かを判断するステップと、(e)上記サブフレームの所要のサブユニットが未だに全部収集されていない場合に、サブフレームの再送を待って欠落したサブユニットを収集するステップとを含む。
(もっと読む)
衛星利用測位システム・データ・インテグレータおよび配信システム

【課題】飛行前のミサイルの衛星利用測位システム受信機にホット・スタート航行情報を提供する兵器システムの改善を提供する。
【解決手段】分類された赤暗号鍵を使用して、衛星の1つまたは複数の衛星利用測位システムコンステレーションからのP(Y)信号を復号する衛星利用測位システム受信機を備える。一旦P(Y)信号が復号されると、信号の1つまたは複数の特性(例えば、PRN符号同期化、ドップラ・シフト、変調ビット・シーケンス等)が導き出される。次に、これらの信号の特性−および赤暗号鍵を含む黒暗号鍵他の情報−は、飛行前のミサイルの衛星利用測位システム受信機に提供される。ミサイルにこの情報を提供することによって、ミサイルはP(Y)信号を取得でき、これによってミサイルは他の方法に比べてその位置をより迅速に判断することが可能となる。
(もっと読む)
衛星航法装置、外部基地局、及び衛星測位システム
【課題】衛星信号の受信環境が悪化した場合であってもTTFFを改善することができる衛星航法装置、外部基地局、及び衛星測位システムを提供する。
【解決手段】GPS衛星35は衛星信号を送信し、基地局30は衛星信号を受信するGPS信号受信部33と、航法データを所定のデータフォーマットに変換する変換部32と、変換された補助情報をGPS受信機10へ送信する基地局送信部31と、アンテナ36と、を有し、GPS受信機10(衛星航法装置)に対して補助情報を提供する。GPS受信機10は、アンテナ24と、周波数変換部11と、擬似距離測定部12と、航法データ復調部15と、航法データ記憶部21と、時計部17と、受信制御演算部14と、衛星送信時刻予測部16と、測位演算部13と、アンテナ23と、外部情報受信部22と、変換部19と、外部航法データ記憶部18と、を有している。
(もっと読む)
無線通信端末及び測位方法
【課題】無線端末装置が基地局のサービスエリア外に位置する場合であっても位置精度の向上を図ることが可能な無線通信端末及び測位方法を提供する。
【解決手段】本発明の無線通信端末は、まず通信の候補となる基地局を捕捉して自端末の概算位置P11を求め、捕捉に成功した捕捉成功基地局(基地局BS1)が1つの場合に、先に求めた概算位置P11を軌道情報管理装置に送信して、概算位置に応じたGPS衛星の軌道情報を取得し、この軌道情報に基づいてGPS衛星を捕捉する。ここで、GPS衛星の捕捉に失敗した場合に、本発明の無線通信端末は、基地局BS1のサービスエリアR1外に少なくとも1つの新たな概算位置P21〜P25,P31〜P37,P41〜P49を設定し、設定した新たな概算位置とGPS衛星の軌道情報とを用いてGPS衛星を捕捉する。
(もっと読む)
信号同期装置及び監視方法
【課題】GPS信号喪失時の同期ズレ発生や障害の拡大を未然に防止する。
【解決手段】GPSユニット200より供給されるGPS信号とクロック発生器10のフィードバック信号とを比較器20により比較することにより得られる差分に基づいてクロック発生器10を補正する信号同期装置であって、クロック発生器10を補正する補正値の許容範囲を記憶する許容範囲情報記憶部50と、補正値が許容範囲内にあるか否かを監視する補正監視部40とを備える。
(もっと読む)
デジタルテレビジョンとGPSとの共存を可能にする技術
本発明の実施の形態は、少なくとも1ビットのフラグがオンであるとき、デジタルテレビジョン(DTV)受信機が初期の取得プロセスを開始することが許可されないように、少なくとも1ビットのフラグを含むDTV受信機を含む装置を提供し、1ビットのフラグをオンにすることが可能な少なくとも1つの更なる受信機は、DTV受信機の受信チェインの一部を共有する。フラグは、DTV受信機のドライバと少なくとも1つの更なる受信機との間の通信を通して設定される。 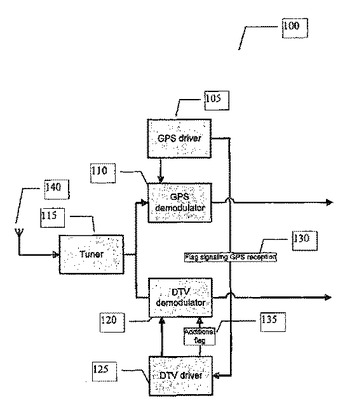 (もっと読む)
(もっと読む)
位置通報システム、無線通信端末、軌道情報管理装置及び位置通報方法
【課題】位置精度の向上を図ることが可能な位置通報システムを提供する。
【解決手段】無線通信端末は、通信の候補となる基地局を捕捉する基地局捕捉手段と、捕捉成功基地局が1つの場合に、当該捕捉成功基地局の基地局情報を軌道情報管理装置に送信する第1の制御手段とを備え、軌道情報管理装置は、基地局情報に基づいて、捕捉成功基地局の通信エリアから他の基地局の通信エリアとの重複領域を除外した領域の中心点を、無線通信端末の概算位置として決定する概算位置決定手段と、概算位置と当該概算位置に応じたGPS衛星の軌道情報とを無線通信端末に送信する第2の制御手段とを備え、第1の制御手段は、GPS衛星の捕捉に失敗した場合に概算位置を自端末の位置と決定する。
(もっと読む)
SPS受信装置およびSPS受信機能付き移動通信端末装置
【課題】SPS受信装置において、衛星電波の受信が途切れたときに衛星電波をより早く再補足することができるようにする。
【解決手段】SPS受信装置に、SPS受信機が置かれている状況変化をSPS受信周波数のサーチ範囲を変更するトリガーとして検出するトリガー検出手段と、SPS受信周波数のサーチ範囲を変更するサーチ範囲補正制御手段を設け、トリガー検出手段によりSPS受信機が置かれている状況について所定の状況変化が検出されたときは、サーチ範囲補正制御手段により、SPS受信周波数のサーチ範囲を拡大あるいは縮小して衛星電波を受信する。
(もっと読む)
位置推定方法および位置推定システム
【課題】無線端末の位置推定を始めるための初期設定を簡素化し、位置推定の精度を向上させる。
【解決手段】位置推定システムは、無線端末10からの受信電波強度を測定する無線ノード1と、位置推定装置2とを有する。位置推定装置2は、無線ノード毎に測定された受信電波強度と無線ノード毎に決定されたパラメータとを距離の推定式に代入し、無線端末10と無線ノード1との間の距離の推定値を無線ノード毎に算出する距離算出手段と、距離の推定値から無線端末10の位置を算出する位置算出手段と、予め想定される正規分布に基づいてパラメータを逐次変更しながら、距離算出手段と位置算出手段に処理を繰り返し実行させるパラメータ決定手段と、位置算出手段が算出した無線端末10の全ての位置データの平均を無線端末10の推定位置として確定する位置推定手段とを有する。
(もっと読む)
衛星測位システムの初回測位時間を改善する方法およびシステム
衛星測位システム(SPS)アンテナ支援装置(100)は、SPS受信器(102)、方位値、チルト値または加速度値を決定するための環境センサ(106)、およびプロセッサ(104)を有する。前記プロセッサは、方位を決定し(306)、視野内の衛星に対してピークアンテナ利得の推定方向を決定し(304)、ピークアンテナ利得の推定方向と環境データとに基づいて、視野内の衛星の一部の捕捉試行を優先させる(308)ようにプログラムできる。前記プロセッサは、仮定ピーク利得を有する衛星の検索に、より短い滞留時間を用い、より低い利得を有する衛星の検索に、より長い滞留時間を用いるように相関器を分割して分割検索を実行できる(310)。前記装置は、ピークアンテナ利得の推定方向に基づいて、SPS受信器の方位を考慮してユーザに配向ガイドを電子的に提示できる(312)。 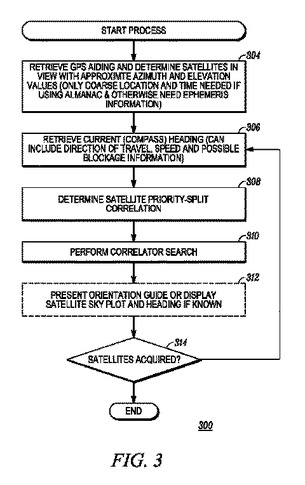 (もっと読む)
(もっと読む)
測位装置及び測位情報受信方法
【課題】衛星からの測位情報を継続して受信することができない状況下でも、短時間での位置計測を可能とする。
【解決手段】測位装置を、常時動作する時計部1と、位置計測時にだけ動作するGPS部2とにより構成する。測位情報の受信タイミングを生成する高精度の第1のカウンター8をGPS部2に設け、GPS部2の動作の有無に関係なく連続して動作する高精度の第2のカウンター14を時計部1に設ける。位置計測の終了時に、第2のカウンター14を第1のカウンター8に同期させておき、所定時間内における再計測時には、第1のカウンター8を第2のカウンター14に同期させる。再計測を開始した時点における測位情報の受信タイミングと送信タイミングとのズレが少なく、再計測時における測位衛星の捕捉作業が短時間に行える。
(もっと読む)
測位装置、電子機器及びプログラム
【課題】精度と感度とを両立させた測位を実現すること。
【解決手段】フィルタ部70の通過帯域の異なる2種類のフィルタそれぞれから出力され
た信号がメモリ部80の異なるメモリにそれぞれ記憶され、当該メモリに記憶されている
信号に基づいて測位処理が行われる。具体的には、コヒーレント積算処理及びインコヒー
レント積算処理が行われることで受信信号の信号強度が算出され、当該信号強度に対して
閾値判定が行われることで、測位に用いる信号系統が高感度系統S1又は高精度系統S2
に択一的に切り替えられる。
(もっと読む)
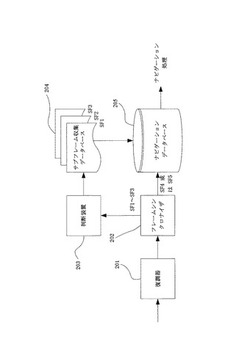
現在の放送軌道暦を使用しない位置の確定
長期間にわたって放送軌道暦データを使わずに位置情報を確定するための装置と方法について記載する。放送軌道暦から確定される衛星状態を格納し、この格納された衛星状態に関する運動方程式を数値積分して、現在の衛星状態を確定するクライアント装置が開示される。クライアント装置は、受信された衛星信号と共に現在の衛星状態を使用して、この衛星信号がどこで受信されたかを確定する。 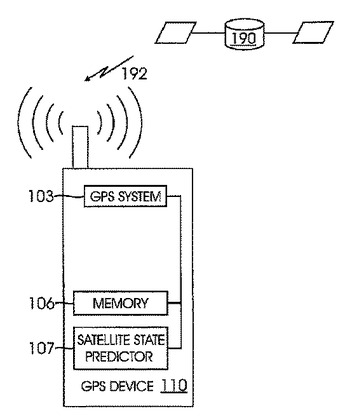 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】車両のエンジンが起動された後、直ちにナビゲーションすることができるとともに、効率的に測位することができ、ポータブル型であっても適用が容易なナビゲーション装置を提供する。
【解決手段】現在位置を測位するGPSアンテナ12や測位プログラム18b1を実行したCPU11と、地図情報を記憶する地図情報データベース18a1と、当該測位された現在位置を、当該記憶された地図情報とともに表示部13に表示させる表示制御プログラム18b2を実行したCPU11と、を備えるナビゲーション装置1において、ナビゲーション装置1が使用開始される時間帯を設定する時間データテーブル18a2や設定プログラム18b3と、当該設定された時間帯よりも所定時間前に、GPSアンテナ12や測位プログラム18b1を実行したCPU11による現在位置の測位を開始させる開始制御プログラム18b4を実行したCPU11と、を備えるよう構成した。
(もっと読む)
受信装置および受信制御方法
【課題】使い勝手がよく、しかも小型化が可能な受信装置を提供する。
【解決手段】GPS衛星のアルマナック情報を衛星データROM6に記憶しておき、使用開始時点では、それをSRAM7へ転送することにより、アルマナックデータの取得作業を廃止する。また、衛星データROM6内のデータが無効となった場合には、それを示すフラグをEEPROM12のフラグ領域12bに書き込み、使用を中止する。同時に、GPS部3により新たなアルマナック情報を取得し、それをEEPROM12の衛星データ記憶領域12aに記憶するとともに、以後は、そのデータを使用する。アルマナック情報の保持に必要な二次電源が不要となる。また、GPS部3の受信動作終了後には、エフェメリスが有効な所定時間だけ主電源からSRAM7へ電力を供給し、その後は電源を遮断する。
(もっと読む)
測位情報処理システム
【課題】GPSレシーバを、より小型・軽量化できる測位情報処理システムを提供する。
【解決手段】衛星から送信される情報を受信し、測位情報を生成して出力するGPSレシーバ20と、GPSレシーバに接続される端末装置10とを含む。端末装置10は、GPSレシーバ20が測位情報を出力している間、所定のタイミングごとに、エフェメリス情報及びアルマナック情報をGPSレシーバ20から取得し、取得したエフェメリス情報及びアルマナック情報を保持する。ここで保持したエフェメリス情報及びアルマナック情報が、GPSレシーバ20の初期化処理に供される。
(もっと読む)
測位装置、その制御方法、制御プログラム及びその記録媒体
【課題】初期位置の誤差を的確に把握して、擬似距離の算出方法を選択することができる測位装置等を提供すること。
【解決手段】測位のための初期位置P0に対する、現在時刻におけるSPS衛星の衛星軌道上の位置Psを算出する相対位置算出手段と、初期位置P0に対するSPS衛星の移動状態に基づいて、ドップラー偏移を予想して、衛星信号の予想受信周波数を算出する予想受信周波数算出手段と、予想受信周波数と実際の受信周波数である実測受信周波数との周波数差分を算出する周波数差分算出手段と、相対位置及び周波数差分DPerに基づいて、初期位置の誤差P0erを算出する初期位置誤差算出手段と、初期位置の誤差P0erに基づいて、衛星信号のコードフェーズを使用して擬似距離を算出する第1測位方法、又は、衛星信号の遅延時間を使用して擬似距離を算出する第2測位方法のいずれかを選択する測位方法選択手段と、を有する。
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】高度データを保持する記憶負担を低減し、かつ、前回測位時の不良な測位条件の影響を低減しつつ、2次元測位に使用するための正確な高度情報を取得することができる測位装置等を提供すること。
【解決手段】推定高度H1を示す推定高度情報を格納する推定高度情報格納手段と、SPS(Satellite Positioning System)衛星からの信号である衛星信号を受信する信号受信手段と、推定高度H1を使用して2次元測位を行って、2次元高度H2cを算出する2次元高度算出手段と、2次元測位の際に、予備3次元測位によって3次元高度H2bを算出する3次元高度算出手段と、推定高度情報を更新するために3次元高度H2b又は2次元高度H2cのいずれか一方を選択する高度選択手段と、高度選択手段によって選択した3次元高度H2b又は2次元高度H2cによって、推定高度H1を更新する更新手段と、を有する。
(もっと読む)
搬送波位相式測位装置
【課題】サイクルスリップが発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で測定される衛星信号の搬送波位相の積算値又はその位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアス又はその位相差とを状態変数とし、複数の観測周期での衛星データに基づいて前記状態変数を推定して移動局の測位を行う搬送波位相式測位装置であって、位相積算値のサイクルスリップの有無を検出するサイクルスリップ検出手段を備え、サイクルスリップが検出された場合は、サイクルスリップの検出された衛星に係る状態変数だけを初期化して測位を継続する。
(もっと読む)
121 - 140 / 251
[ Back to top ]