
Fターム[5J062AA04]の内容
Fターム[5J062AA04]に分類される特許
1 - 14 / 14
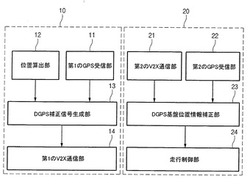
移動基準局を利用した車両間相対位置制御方法及びそのシステム
【課題】車両間相対位置の正確度を改善し、位置制御できる移動基準局を利用した車両間相対位置制御方法及びそのシステムを提供する。
【解決手段】DGPS補正信号を発信する移動基準局10と、DGPS補正信号を受信して位置制御を行う制御対象車両20とが備えられる車両位置制御システムにおいて、衛星からGPS信号を受信する第1のGPS受信部11と、検出された値を根拠に現在の位置情報を算出する位置算出部12と、DGPS補正信号生成部13と、DGPS補正信号を送り出す第1のV2X通信部14と、が備えられ、前記制御対象車両には、第2のV2X通信部21と、GPS信号を受信する第2のGPS受信部22と、受信されたDGPS補正信号と第2のGPS受信部により自己の位置情報を算出して補正するDGPS基盤位置情報補正部23と、車両の速度及び方向を制御する走行制御部24と、が備えられていることを特徴とする。
(もっと読む)
航空機のための交互通信

【課題】遠隔操作を行なうための双方向無線通信が不能となった場合でも、衛星受信機を介してコマンド及びコントロールメッセージを処理する航空機を提供する。
【解決手段】航空機は、メッセージ通信能を有する衛星受信機を備えている。この受信機は、交互通信が必要とされるときにコマンド及びコントロール(C2)メッセージを処理する。航空機は、更に、衛星受信機が受信したC2メッセージに含まれる命令に従って一連の動作を行うアビオニクスを備えている。
(もっと読む)
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
(もっと読む)
情報処理装置および情報処理方法
【課題】 高架道路および高架下道路のいずれかを車両が走行している際に、走行している道路が高架道路か高架下道路のいずれであるかを精度よく判断することができる情報処理装置を提供する。
【解決手段】 ナビゲーション1は、GPS受信機2から送信されるGPS情報に基づいて、自車両の位置を取得する。また、車車間通信装置4を介して、他車両位置情報および他車両位置情報を取得した際のGPS受信強度信号を取得する。さらに、取得した他車両位置情報およびGPS受信強度信号に基づいて、他車両が高架道路を走行しているか高架下道路を走行しているかの他車両三次元位置を取得する。こうして取得した自車両位置および他社量産時原位置に基づいて、自車両と他車両との衝突可能性を判断する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法機能とGPS等の測位手段とを併用して、移動経路上の複数地点の測位を行う場合に、最終的に正確な各地点の位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 現在位置の測位が可能な測位手段と、自律航法用センサの計測データによって移動経路の位置情報を算出する自律航法機能とを備えた測位装置において、移動経路上の第2基準地点Bについて、自律航法機能により算出された位置情報が表わす位置B1と、測位手段の測位結果が表わす位置Bとの差を表わすベクトルVbに基づき、該ベクトルVbを第1基準地点Aからの移動距離に応じた係数で乗じた補正ベクトルVxを、自律航法機能により算出された移動軌跡(T1)に加算して補正後の位置情報(T2)を取得する。
(もっと読む)
音波出力装置、通話装置、音波出力方法、及びプログラム
【課題】予め限定されない任意の方向又は場所に位置する対象に指向性を向けて音波を出力すること。
【解決手段】一実施形態において、所定の信号源から送信される無線信号を受信する受信部と、前記受信部により受信された前記無線信号から、前記信号源の位置に依存するパラメータ値を決定する決定部と、前記パラメータ値に基づいて、前記信号源の方向へ指向性を有する音波を出力する音波出力部と、を備える音波出力装置が提供される。
(もっと読む)
無人ボート自動観測システムおよび無人ボート自動観測方法
【課題】観測航路を自動的に生成しその観測航路下の水中または水底の様子を自動的に観測できるようにする。
【解決手段】観測航路を生成するために基準観測線を入力し(S1)、前記基準観測線を一定の距離平行移動させることによって複数の観測航路を生成し(S2)、生成された複数の観測航路の距離を確定させると同時に確定させた観測航路の航行順序を指示し(S3)、指示された航行順序にしたがって無人ボートを航行させ(S4)、航行中に少なくとも水中または水底の様子のいずれかを観測し(S5)、観測されている少なくとも水中または水底の様子を表示するとともに記憶させる(S6)。
(もっと読む)
目標追尾装置
【課題】アンセンテッドカルマンフィルタの推定精度を、観測条件によらずに安定化させることのできる目標追尾装置を得る。
【解決手段】追尾フィルタにおける運動モデルと観測モデルが非線形関数で表される場合に、非線形関数をアンセンテッド変換により近似するアンセンテッドカルマンフィルタを適用した追尾フィルタ2を備え、追尾フィルタ2は、受信信号に基づいて算出された目標の測位結果を逐次読み込み、測位結果からアンセンテッドカルマンフィルタを適用して算出した予測値と測位結果とに基づいて、測位結果に対する予測値の適合度を逐次算出する予測値適合度評価部22と、予測値適合度評価部22で逐次算出された適合度に基づいて、アンセンテッドカルマンフィルタにおけるアンセンテッド変換のスケーリングパラメータを逐次更新するパラメータ設定部24とを備える。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
散布位置制御装置
【課題】GPS受信機で測定された緯度・経度データだけで散布位置を演算すると測定遅れや特殊車輌の移動速度によっては散布位置の誤差が大きくなる。
【解決手段】この改善策として、不連続的に伝達されるGPS受信機からの緯度・経度データに補正をかけ、正確な位置情報とするために、移動体が進行する方位データと速度データにGPS受信機からの信号不通経過時間を積算した演算結果によって移動体が位置する緯度・経度(現在地)とした。
(もっと読む)
GPS誤差補正、車両追跡及びオブジェクト位置
ディファレンシャルGPSについて誤り要因を決定する方法及びコンピュータプログラムが、車両追跡方法とともに、開示されている。誤り要因の決定において、推定される位置データはGPSからGPRSを介してサーバへ送信される。GPS信号は既知のルート、すなわち、道路又は線路、に沿って進む車両から送信されているので、データはルート及び計算される補正因数と一致しうる。次いで、誤り要因がディファレンシャルGPSデバイスへ送信される。車両追跡のために、GPSは、自身の位置にのみ関するデータを規則的な間隔でGPRSを介して送信する。 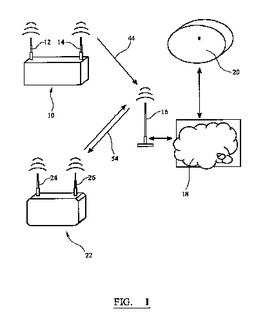 (もっと読む)
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 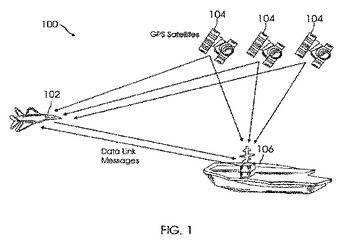 (もっと読む)
(もっと読む)
車両の走行制御装置
【課題】 基準局の異常を的確に検出し、精度のよい走行制御を実現することができる車両の走行制御装置を提供する。
【解決手段】 制御装置18は、基準局4からの情報とGPS衛星3からの情報に基づいて測位した自車位置から自車両1の走行情報(第1の走行情報)を演算し、この第1の走行情報が実車の走行状態から求まる走行情報(第2の走行情報)に対して予め設定した閾値以上異なるとき、基準局4が移動することによる該基準局4の異常を判定することにより、基準局4の異常を的確に検出する。そして、制御装置18は、異常判定時に、自車位置に基づく走行制御の実行をキャンセルすることにより精度のよい走行制御を実現する。
(もっと読む)
位置測定システム
【課題】 切り立った山に囲まれたダムのような人工衛星からの電波が直接受信できない領域を移動体が移動する場合も、簡単な構造であるにもかかわらず、GPSを用いて正確に測定することができるようにする。
【解決手段】 移動体20と、そして、GPS機能を備えた飛行体30とを含んで構成されてなるGPSを用いた位置測定システムであって、飛行体30は、移動装置と、移動体との相対位置を計算可能な移動体位置計測装置32−34と、及び、移動体位置計測装置によって計測した位置データを移動体に送信する送信装置36とを有しており、移動体20は、飛行体30から送信される位置データを受信する受信装置と、及び、受信した位置データを保存する記録装置とを有している。
(もっと読む)
1 - 14 / 14
[ Back to top ]