
Fターム[5J062AA06]の内容
Fターム[5J062AA06]に分類される特許
21 - 40 / 87
路側通信機及び位置精度推定方法
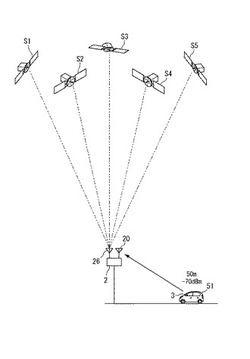
【課題】車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できるようにする。
【解決手段】地上からGPS衛星までの距離は路側通信機と車載通信機との距離に比べて非常に長いため、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、車載通信機3と路側通信機2とは同じ条件であると解される。そこで、GPS衛星S1〜S5から送信される信号を路側通信機2が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、車載通信機3のアップリンク信号に含まれる位置情報の精度を推定する。
(もっと読む)
過剰遅延勾配を監視する地上システムおよび方法

【課題】衛星信号の水平遅延勾配を監視する処理機能部を提供すること。
【解決手段】処理機能部は、衛星差分モジュール、二重差分モジュール、および勾配推定器モジュールを含む。衛星差分モジュールは、互いに既知の幾何学的関係を有する少なくとも2つの基準受信機から、少なくとも2つの衛星の搬送波位相測定値を受け取る。衛星は、被監視衛星および少なくとも1つの他の衛星を含む。衛星差分モジュールは、被監視衛星からの信号と少なくとも1つの他の衛星からの信号との搬送波位相測定値の差分を決定する。二重差分モジュールは、少なくとも2つの基準受信機の対の間の二重差分を形成し、対の間の二重差分を基準受信機の既知の位置の差で補償し、二重差分を平均化する。勾配推定器モジュールは、被監視衛星に関する平均化された補償二重差分に基づいて水平遅延勾配の大きさを推定する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車の位置を正確に検出して列車の速度を制御する。
【解決手段】GPS受信機3a,3bから出力される位置情報により算出したGPSアンテナ2a,2b間の距離と方位と列車1の走行経路が制御情報記憶部5に記憶しているGPSアンテナ2a,2b間の距離Lと方位Dp及び走行経路と近似しているかどうかを判定するとともにGPS受信機3a,3bから出力される速度情報が列車1の実走行速度Vと近似しているかどうかを判定し、全てが近似しているとき、GPS受信機3a,3bの精度良好として列車1の前部に設けられたGPSアンテナ2aが接続されたGPS受信機3aから出力する位置情報により列車1の走行位置を決定して列車1の走行位置を検出するための地上子等を地上に設置する必要がなく、地上設備を簡略化して設備費を低減する。
(もっと読む)
走行リンク確定装置及びリンク旅行時間算出装置
【課題】確定リンクが連続しない不連続区間が生じたときでも、不連続区間を精度良く補間する。
【解決手段】リンクマッチ処理部31は、リンク単位で位置座標が定義されている地図データと、異なる時刻における移動体位置座標を含む移動体位置データとを比較して、各移動体位置座標に対する一または複数の候補リンクを抽出する。走行リンク確定部33は、一または複数の候補リンクの中から、一のリンクを確定リンクとして抽出する。補間処理部35は、深度がN(Nは3以上の自然数)以下で不連続区間を結ぶ補間経路が唯一存在し、かつ、その唯一の補間経路の深度がN−2以下であれば、その唯一の補間経路を確定リンクとして不連続区間を補間する。
(もっと読む)
車両位置測定装置および車両位置測定方法
【課題】GPS衛星からの電波を受信できない場所において、車両位置の測定精度を向上させること。
【解決手段】現在の車両の位置を推測し、推測された車両の位置を、推測された時刻と対応付けて累積して測位情報記憶部に書き込み、固定して設置された通信装置から送信される信号を受信し、信号が受信された際の車両の位置を受信された信号に基づいて検出し、信号が受信された時刻以降の時刻に対応付けて測位情報記憶部に記憶される車両の位置を、検出された車両の位置に基づいて更新する。
(もっと読む)
トンネル内取締機対応の道路交通情報受信装置
【課題】トンネル内の取締機に対して高価なジャイロセンサ等のシステムを用いることなく安価な加速度センサだけで対応できて交通事故を防止に寄与する道路交通情報受信装置を提供する。
【解決手段】GPSモジュールから位置および速度データを受信し位置登録データメモリから現在位置に対応した道路交通情報を得て制御を行うCPUと、前記道路交通情報を聴覚的または視覚的に運転者に報知する報知部と、を備え、さらに位置登録データメモリの中にトンネル情報を登録し、加速度センサを備え、GPSモジュールから受信しなくなったトンネルでは、トンネル情報と加速度センサからのデータをハイパス・フィルタを介して用いて自車の位置と車速を算出し、トンネル内の取締機の警告をするようにした。
(もっと読む)
通信装置、処理方法、プログラム、DSRCユニット、路側機および車載装置
【課題】車両に対して実際の走行軌跡に基づいて交通管理をできるようにすること。
【解決手段】車載装置100は測定部120で測位を行い、測位した位置情報を車載装置100を搭載した車両の移動情報としてドライブレコーダー130に記憶する。路側機200の路側機通信部210は近くを通行した車両に搭載された車載装置100のDSRCユニット110と通信し、識別情報記憶部140に記憶された車載装置100の識別情報を取得する。情報センター300の情報センター通信部310は車載装置100の移動情報と路側機200が通信した車載装置100の識別情報とを受信する。移動情報判定部320は移動情報に識別情報を取得した路側機200の所在位置が含まれるかを判定し、含まれない場合、移動情報を誤った情報として処理する。課金部340は正しい情報であると判定された移動情報に対して課金処理を行う。
(もっと読む)
列車位置検知システム
【課題】鉄道分野という条件を活かし、シンプルな構成で効果的に列車位置検知におけるマルチパス誤差の低減を実現することである。
【解決手段】衛星24からの衛星信号を受信する地上に設置された1つ以上の基準局11は、受信した衛星信号の中から所定個数の衛星組合せを選択し、選択した衛星信号から基準局11の位置を算出し、誤差の小さい衛星の組合せのリストである高優先度衛星組合せ情報を生成して列車13に送信する。列車13の車上装置は、衛星14からの衛星信号を受信するとともに、基準局11で生成された高優先度衛星組合せ情報を受信し、受信した衛星信号の中から位置誤差の小さくなる衛星組合せを選択し、選択された衛星信号を利用して受信した衛星信号に基づき列車の位置を算出する。
(もっと読む)
位置検出装置及びアンテナ装置
【課題】自車両の位置の検出精度を高めることができる位置検出装置及びアンテナ装置を提供する。
【解決手段】位置検出装置100は、道路Rに設けられた路側装置Aから送信され位置情報を有する円偏波の受信時の方位に基づいて自車両Cの位置を検出する位置検出装置であって、NULL方位から円偏波W1を受信した場合に受信強度が低下する受信強度低下点が現れ、非NULL方位から円偏波W21を受信した場合に受信強度が低下しない第一の指向性を有するNULL指向性検出部4と、NULL方位及び非NULL方位から円偏波W1,W21を受信した場合に受信強度が低下しない第二の指向性を有する広角指向性検出部5と、NULL指向性検出部4により出力された受信強度と、広角指向性検出部5により出力された受信強度との差分値の変化量に基づいて自車両Cの位置を検出する位置検出部12と、を備える。
(もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
航法データ更新通知システム及び方法
【課題】衛星航法補強システムに採用することにより、地上システムと機上システムとで使用する航法データを一致させて測位精度の悪化を回避して安全性を図る。
【解決手段】衛星から受信したレンジング信号に含まれる誤差を推定し、その誤差を修正するための補正情報をフォーマッティングして送信する地上システムと、前記測位衛星から受信したレンジング信号と、前記フォーマッティングされた補正情報とに基づいてディファレンシャルGPS測位演算し規定ルートからの変位を表示する機上システムとを有し、前記地上システムは、前記補正情報を生成する際に使用したSBAS航法データが更新された際に航法データの更新を前記補正情報に付加して通知する。前記機上システムは、前記送信される前記SBAS航法データ更新の通知を検出し、前記更新されたSBAS航法データに切り替えて前記ディファレンシャルGPS測位演算する。
(もっと読む)
車両測位システム、車庫システム、および車両測位方法
【課題】車両の位置を測位する際に、高い使用周波数(例えば、5.8GHz帯)で動作するETC車載器を利用できるともに、低い周波数(例えば、2MHz)により安定して車両の駐車位置を測位できる、車両測位システムを提供する。
【解決手段】3箇所に設置された受信局101、102、103により、ETC車載器3から発信される電波を受信して車両2の位置を測位する。ETC車載器3では、キャリア波(例えば、5800MHz)を変調し、測位に供する2つの周波数スペクトル(例えば、5799MHzと5801MHz)を含む信号を生成して無線により送信する。各受信局は、ETC車載器3から受信した電波の信号から2つの周波数スペクトルの差の周波数成分(例えば、2MHz)の位相差を測定し、この位相差の信号を基に、ETC車載器3を搭載した車両2の位置を測位する。
(もっと読む)
電離層補正値を算出するネットワーク及び方法
本発明は、電離層補正値を計算し、衛星ナビゲーションシステムのユーザに提供することを可能にするネットワークに関し、ネットワークが、
− 衛星(GNSS)によって伝送されたナビゲーション信号の遅延を計測可能な機上搭載のRF受信機(21)をそれぞれが備える複数の航空機(2)によって構成される航空ユーザセグメントと、遅延の前記測定値を地上セグメント(300)に伝送するための、複数の航空機(2)と地上セグメント(300)との間の航空データ通信手段(5)と、を備える航空セグメント(200)と、
− グリッドの計算に使用される遅延の計測値であり、複数の航空機(2)から及び複数の地上局(SBAS G)からもたらされる遅延の計測値を、地上セグメント(300)のレベルで受信する手段と、を有することを特徴とする。 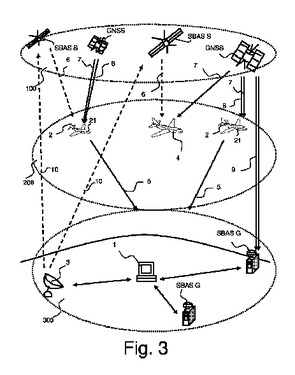 (もっと読む)
(もっと読む)
精度不良を検出する装置を備えるナビゲーションシステム
【課題】位置解の精度不良を検出し、保護レベルを精度よく算出する。
【解決手段】複数の送信機から複数の信号を受信するように動作することができる受信機14を有する車両用のナビゲーションシステム12は、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、この命令はプロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主航行解のための誤差共分散行列を求めること、及びパリティ空間技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
位置特定装置及び位置特定システム
【課題】車両などの移動体の位置を精度よく特定することができる位置特定装置及び位置特定システムを提供する。
【解決手段】時刻ずれ算出部51は、各通信部20、30、40が送信した時刻補正用信号を基準の通信部10で受信した受信時刻及び受信した時刻補正用信号に含まれる送信時刻に基づいて、基準の通信部10と各通信部20、30、40との時刻ずれを算出する。時刻補正部52は、基準の通信部10と、他の通信部20、30、40との時刻ずれを0にすべく時刻補正を行う。到達時間差算出部53は、車載機が送信した測位用信号を各通信部10〜40で受信した場合、各通信部10〜40での測位用信号の到達時間差として算出する。位置特定部54は、到達時間差に基づいて車載機の位置を特定する。
(もっと読む)
GPS電波遮断物体検出システム
【課題】他の移動経路(14a,14a)の隣接している移動経路(14,14)にGPSアンテナ11が設置されても、高い精度・確度でGPS電波遮断物体(15)を検出する。
【解決手段】GPSアンテナ11と、そのGPS信号を処理して測位結果を出力するGPS受信機12と、その出力Sに基づく電波受信の成否に応じてGPS電波遮断物体の存否を判断する判定装置14と、GPS電波遮断物体の検出に使用するGPS衛星(16)をその方位・仰角・受信レベルと選別用データの方位・仰角・強度閾値との比較に応じて選別する選別手段13cと、その選別結果を一定期間に亘って保持するバッファ手段13dと、移動経路(14,14)に係る進行方向に基づいて選別用データのうち方位の部分を自動設定する方位設定手段13bとを備える。
(もっと読む)
電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法
【課題】送信機からの電波の回折度合いを推定し、推定結果に応じて車両の位置を精度良く特定することができる電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法を提供する。
【解決手段】制御部30は、周辺車両300の形状情報、位置情報を取得し、自車両の予測位置を求め、送信機200との仮想直線を特定する。制御部30は、送信機200からの電波を受信して電波測位位置を求める。制御部30は、周辺車両300の形状情報、車間距離、仮想直線などに基づいて周辺車両300による仮想遮蔽面を特定し、仮想遮蔽面と仮想直線などに基づいて電波の回折角度θを算出する。制御部30は、算出した回折角度に応じて重み付け係数を設定し、設定した重み付け係数、予想位置及び電波測位位置に基づいて、自車位置を特定する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
車車間相対位置算出装置、車車間相対位置算出装置に送信する送信装置、車車間相対位置算出装置用のプログラム、および送信装置用のプログラム
【課題】衛星航法用衛星からの信号に基づいて2台の車両間の相対位置関係を算出する技術において、算出の精度を従来よりも向上させる。
【解決手段】以上のように、車両1、2の車載通信装置は、複数のGPS衛星3〜6から電波を受信し、受信した当該電波の搬送波位相を特定する。そして車載通信装置は、他車両(車両1の場合は車両2、車両2の場合は車両1)から、当該他車両において観測された搬送波位相の情報を受信する。そして車載通信装置は、他車両から受信した搬送波位相と、自車両の搬送波位相のうち、同時刻に観測されたもの同士のずれ(一重差、二重差等)に基づいて、干渉測位の方法により、自車両の他車両に対する相対位置を算出する。
(もっと読む)
21 - 40 / 87
[ Back to top ]