
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
181 - 200 / 675
衛星ナビゲーションシステムの精度性能を検査する方法およびシステム
【課題】 衛星ナビゲーションシステムの精度性能を検査する方法およびシステムを提供する。
【解決手段】
本発明は、特に衛星ジオメトリに関して、観測状態によらず、精度レベルを満たすことを保証できる衛星ナビゲーションシステムの精度性能を検査する方法およびシステムに関する。
本発明は、衛星ナビゲーションシステムの設計、検査、および認定のための性能検査ツールである。
(もっと読む)
測位データ評価装置、測位データ評価方法および測位データ評価プログラム

【課題】GPSなどの測位衛星で得られた測位データから計測誤差が大きい測位データを検出できるようにすることを目的とする。
【解決手段】連続解グルーピング部110は各時刻のGPS測位データを連続解毎にグループ分けする。前後解抽出部121は各時刻のGPS測位データから連続解の前後解を抽出する。棄却候補抽出部122は前後解のFIX衛星数に基づいて棄却候補の連続解を判定する。棄却候補提示部130は棄却候補の連続解を利用者に提示する。棄却候補棄却部140は利用者に指定された棄却連続解を棄却する。棄却連続解補完部150は棄却連続解に対応する時間の測位データを補完する。
(もっと読む)
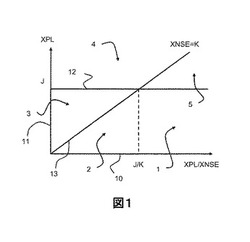
衛星ナビゲーション・システムの精度性能を評価するための計算方法と計算システム
【課題】衛星ナビゲーション・システムの精度性能を評価するための計算方法と計算システムを提供する。
【解決手段】本発明は、衛星ナビゲーション・システムの精度性能を評価するために低い確率の事象を計算する方法とシステムに関する。
本発明は、精度性能を評価するためのチャートを併せて用いることで、極値理論の実施に基づいて低い確率の事象をモデル化することにより、高い要求レベルの衛星ナビゲーション・システムの精度性能を保証することを可能にする。
(もっと読む)
携帯通信端末装置、携帯通信端末装置の測位周期制御方法、及び携帯通信端末装置の測位周期制御プログラム
【課題】携帯通信端末装置の移動状況を適切に把握し、その結果に対応した測位周期で測位を実施する。
【解決手段】本発明の携帯通信端末装置1は、所定の周期で、無線により測位情報を取得する測位情報取得部2と、取得した測位情報に基づき測位処理を行い位置情報を得る測位処理部41と、動きを検知し、動き情報を得る動き検出部3と、直近の過去一定時間内の、動き情報による動きの検知の有無、及び位置情報の変化の有無で定義される状況が、過去一定時間内の、動きの検知の有無、及び位置情報の変化の有無に基づいて、あらかじめ定められた複数の状況のどれに該当するかを判断し、複数の状況のそれぞれに対して、あらかじめ設定された周期の中から、該当する状況に設定された周期を所定の周期として決定し、決定された周期で測位情報の取得、及び測位処理を行うように測位情報取得部41と前記測位処理部42の動作を制御する測位動作制御部と、を備える。
(もっと読む)
過剰遅延勾配を監視する地上システムおよび方法
【課題】衛星信号の水平遅延勾配を監視する処理機能部を提供すること。
【解決手段】処理機能部は、衛星差分モジュール、二重差分モジュール、および勾配推定器モジュールを含む。衛星差分モジュールは、互いに既知の幾何学的関係を有する少なくとも2つの基準受信機から、少なくとも2つの衛星の搬送波位相測定値を受け取る。衛星は、被監視衛星および少なくとも1つの他の衛星を含む。衛星差分モジュールは、被監視衛星からの信号と少なくとも1つの他の衛星からの信号との搬送波位相測定値の差分を決定する。二重差分モジュールは、少なくとも2つの基準受信機の対の間の二重差分を形成し、対の間の二重差分を基準受信機の既知の位置の差で補償し、二重差分を平均化する。勾配推定器モジュールは、被監視衛星に関する平均化された補償二重差分に基づいて水平遅延勾配の大きさを推定する。
(もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】衛星から送信される信号による通過経路の電離層電子密度分布を推定する際に、既知の放送局からの信号を利用して3次元の電離層電子密度分布をより正確に推定する。
【解決手段】アレイアンテナが受信した電波の到来方位と仰角とを算出する第1算出部と、衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、領域毎の電子密度を推定する電子密度推定部38と、アレイアンテナが受信した電波のホップ数を算出するホップ数算出部39と、ホップ数に基づいて算出したアレイアンテナから送信源までの距離と実際の距離との差が所定のしきい値以下である場合に電子密度推定部による推定結果を正しいと判定する判定部41と、判定部41の判定結果に応じて電波の伝搬経路における電子密度を修正する修正部43とを備える。
(もっと読む)
位置決め装置の異常変位を判定するためのシステム、方法、および装置
【課題】 空間内の位置決め装置が変位されたかどうかを判定するための技術的解決法を提供する。
【解決手段】 本発明の実施例では、空間内の位置決め装置が変位されたかどうかを判定するためのシステム、方法、および装置が提供される。具体的には、測距信号を発する機能を有するタグと、当該タグからの測距信号に基づいて、当該タグが位置する位置点の位置決め装置に対する相対座標を取得するように構成された位置決め装置と、空間内の位置点の相対座標、位置決め装置の較正パラメータ、および信頼済み絶対座標に基づいて、位置決め装置が変位されたかどうかを判断するように構成されたサーバとを備えることのできるシステムが提供される。本発明の実施例により、位置決め装置が変位されたかどうかの判定を正確、包括的、かつリアルタイムに行うことができる。
(もっと読む)
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
(もっと読む)
位置推定方法および位置推定システム
【課題】送信手段が1つしかない環境でも、受信手段の位置を高い確率で推定することができる位置推定方法および位置推定システムを提供する。
【解決手段】送信手段から無線で送られてきた信号を受信した受信手段が、複数ある候補位置のいずれに位置しているのかを推定する位置推定方法であって、受信手段を各候補位置に配置して受信信号強度分布を取得するステップS1−1と、当該受信信号強度分布を位置指紋として記憶手段に格納するステップS1−2とを実行し、その後、受信手段を推定対象位置に位置させて受信信号強度分布を取得するステップS1−3と、ステップS1−3で取得した受信信号強度分布と、記憶手段に格納されている各候補位置の位置指紋との相関値を求めるステップS1−4と、相関値に基づいて各候補位置の中から推定対象位置に最も相関する候補位置を特定するステップS1−5とを実行する。
(もっと読む)
ユーザプロファイリングのためのポジションデータの高速クラスタ化
ポジションクラスタ化の方法は、クラスタのセット中の各クラスタの長方形の境界線と、各クラスタ内の重心と、各クラスタ内のポイントの数とを記憶させることにより、クラスタのセットを維持することを含む。方法は、クラスタが、クラスタの長方形の境界線と、クラスタ内の重心と、クラスタ内のポイントの数とを調節することにより、ポイントに境界をつけるときに、クラスタのセット中のクラスタにポイントを追加することをさらに含む。 (もっと読む)
位置算出装置、方法及びプログラム
【課題】局所座標系ごとに算出された位置座標を精度よく1つの座標系に統合する。
【解決手段】複数の局所座標系を検出し、端末と複数の送信機それぞれとの間の距離に基づいて、局所座標系それぞれにおいて、複数の送信機の位置座標を算出する手段1920と、複数の局所座標系のうち、閾値以上の数の送信機を共有する2つ以上の局所座標系を、互いに統合可能な座標系として抽出する手段1931と、抽出された2つ以上の局所座標系それぞれにおいて、送信機間距離及び送信機間距離の信頼度を算出し、2つ以上の局所座標系それぞれにおいて算出された送信機間距離の信頼度によって重み付けを行なって重み付け補正後の送信機間距離を算出し、信頼度がある値よりも高い送信機の補正後の送信機間距離のみを用いて、2つ以上の局所座標系を統合した座標系における各送信機の位置座標を信頼度が高い順に算出する手段1932と、を具備する。
(もっと読む)
位置推定装置
【課題】GPS測位精度を向上させるためのリファレンスとなる基地局の設置をせずに、三角測量による位置決めに用いる距離計測が不安定な場所での測位精度を向上させることが課題である。
【解決手段】GPSやその他の三角測量を用いて移動体の位置を推定する装置において、他の移動体やセンタ等と通信手段により、自信からはまだ得られていない距離計測情報を取得する。また、他の移動体までの相対位置を距離計測手段により計測する。相対位置が計測された移動体間の相対距離を、まだ得られていない距離計測情報に適切な変換をかけて付与することにより、測位計算に最低限必要な3点からの距離情報が得られたと同等の連立方程式を解くことで距離計測が不安定な場所でも測位可能となる。
(もっと読む)
支援型ユーザプロファイルによる性能向上した屋内ポジションロケーションのための方法および装置
ワイヤレス通信の方法は、ユーザプロファイル情報を保持することと、複数のポジションロケーションを受信することと、失敗した相関を決定するために、受信したポジションロケーションを相関させることと、受信したポジションロケーションにギャップがあるか否かに基づいて、ブラックアウト期間を決定することと、失敗した相関とブラックアウト期間とに対するロケーション情報を取得することと、取得したロケーション情報に基づいて、ユーザプロファイル情報を更新することと、緊急事態の通知を受信することと、ユーザプロファイル情報、または、緊急事態の通知とともに受信した緊急時のポジションロケーションのうちの少なくとも1つに基づいて、緊急事態の通知に応答することとを含む。 (もっと読む)
測位装置及びプログラム
【課題】簡易な方法でマルチパスの影響を考慮した信頼性の高い測位結果を得る。
【解決手段】測位演算部26で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数に基づいて、受信位置の位置座標及び速度を演算する。建物高情報取得部30で、建物高情報記憶部28に記憶された緯度及び経度に対応した建物高情報から、演算された位置座標に対応した受信位置周辺の建物高情報を取得する。観測誤差算出部34で、GPS受信機12から出力された衛星仰角、取得された建物高情報、演算された位置座標及び速度に基づいて、擬似距離誤差及びドップラーシフト誤差を算出し、誤差補正測位演算部36で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数、並びに観測誤差算出部34によって算出された擬似距離誤差及びドップラーシフト誤差に基づいて、誤差を補正した受信位置の位置座標及び速度を演算する。
(もっと読む)
現在位置特定装置およびプログラム
【課題】GPS受信機を位置検出のための他の装置と併用する環境において、GPS受信機の消費電力低減を実現する新規な技術を提供する。
【解決手段】車両用ナビゲーション装置は、自律航法用のための信号を出力するセンサから出力される信号の値と車両の現在位置との間の関係式を用いて、センサが出力された信号に応じた前記車両の現在位置を算出し、また、GPS受信部が出力した信号に基づいて、間欠的に、前記関係式を補正する。また、車両用ナビゲーション装置は、関係式を補正したことに起因して(ステップ130)、GPSアンテナおよびGPS受信部への電力供給を一時的に停止させ(ステップ145)、その後、復帰条件が満たされたことに起因して、停止している前記電力供給を再開させる。
(もっと読む)
パターン分類を使用した、無線端末が屋内にあるかどうかの推定
【課題】 無線端末が屋内にあるか否かを推定する方法及び装置を提供すること。
【解決手段】 例示的実施形態は、複数の入力/出力マッピングでトレーニングされたパターン分類器を使用し、各マッピングは個々の位置に対応し、マッピングの出力は、当該位置が屋内であるかどうかを示すブール値であり、マッピングの入力は、その位置についての経験信号データと予測信号データに基づく。例示的実施形態によると、トレーニングされたパターン分類器に基づいてコンピュータ実行可能プログラムが生成される。コンピュータ実行可能プログラムは、無線端末から報告される経験データと、おおよそ或いは不正確である可能性のあるその端末の位置の推定(例えばセル識別子(Cell−ID)、GPS等に基づく)とに基づいて、無線端末が屋内にあるか否かを推定する。
(もっと読む)
屋内の検出に基づいて無線端末の位置を推定するための検索エリア削減
【課題】 無線端末向けの位置固有の支援データを生成する目的で、非GPS導出の技術を使用して、Assisted GPS機能を備える無線端末の位置を推定する方法を提供すること。
【解決手段】 無線端末は、支援データを使用して、1つ又は複数のGPS信号を取得及び処理し、無線端末の位置の証明となる情報を導出する。GPSで導出された位置情報は、次いで、非GPS導出の位置と組み合わせられて、GPS又は非GPSどちらかのみで導出するよりも良好な無線端末の位置の推定を形成する。このGPS導出技術と非GPS技術の組み合わせは、無線端末が1つ又は2つのGPS信号しか取得することができない場合に特に有用である。その理由は、2つのみのGPS信号だけで無線端末の位置を求めることは可能でないためである。
(もっと読む)
マルチコンステレーション全地球航法衛星システム補強及び支援
マルチコンステレーションGNSS補強及び支援システムは、複数の基準局を含むことができる。各基準局は、ナビゲーションデータを複数の異なる全地球航法衛星システムから受信し、そして各異なる全地球航法衛星システムに関するインテグリティデータ及び性能データを監視するように適合させることができる。オペレーションセンターは、前記複数の基準局の各基準局から送信される前記インテグリティデータ及び性能データを受信することができる。通信ネットワークは、前記オペレーションセンターからのメッセージを、ユーザのnavcom機器に送信して前記navcom機器を補強し、そして支援することができる。 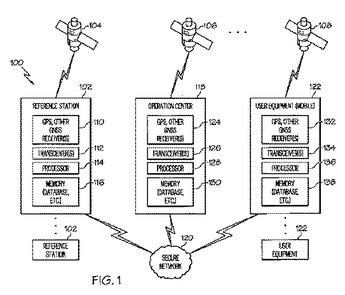 (もっと読む)
(もっと読む)
海面変位計測システム
【課題】基準局の位置が地震で変動しても、RTK法による計測データの連続性を保ち、地震による津波を支障なく検出できる海面変位計測システムを提供する。
【解決手段】第1観測局11での計測データと、観測施設20に設置の第1基準局21での計測データとに基づきRTK法で第1観測局11での海面位置の変動を計測する海面変位計測システム1であって、観測施設20に第2観測局22が設置され、観測施設20とは異なる基準施設30に設置された第2基準局32を基準にRTK法で第2観測局22の位置データを計測し、海面位置データから潮位データを抽出する潮位抽出部43と、潮位データから潮位偏差を算出する潮位偏差演算部46と、潮位偏差と第2観測局22の位置データの各変動に基づき第2観測局22の位置の異常を判断する異常判断部59と、異常判断部59での異常時に海面位置データを補正するデータ補正部42とを具備させたものである。
(もっと読む)
GPS信号とGLONASS信号とを同時に受信するシステムにおけるデジタルフロントエンド
GPS信号とGLONASS信号の両方を受信するための受信機が提供される。この受信機は、アナログフロントエンド(AFE)と、AFEの出力を受信するためのGPSデジタルフロントエンド(DFE)およびGLONASS DFEと、GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI)とを含む。DMIの出力を受信するための検索エンジンが提供される。特に、AFEのいくつかのフロントエンド構成要素が、GPS信号とGLONASS信号の両方を処理するように構成される。 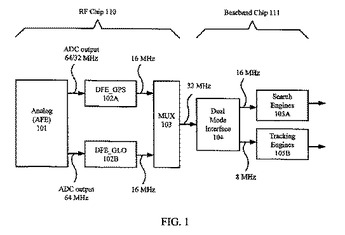 (もっと読む)
(もっと読む)
181 - 200 / 675
[ Back to top ]