
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
221 - 240 / 675
全地球的航法衛星システム受信機における異常測定値の検出および補正ならびにアンビギュイティの決定
全地球的航法システムはローバ内に配置された第1のナビゲーション受信機と、基地局内に配置された第2のナビゲーション受信機とを備える。2つの受信機において受信された衛星信号の測定値の一重位相差が算出され、観測モデルから導き出された一重位相差と比較される。ローバの出力位置を判定し、かつ、整数値アンビギュイティを決定するための計算に先立って、異常測定値が検出され、除去される。検出基準は算出されかつ導き出された一重位相差間の残余に基づく。整数値アンビギュイティを決定するために、コレスキー情報カルマンフィルタおよびハウスホルダー変換に基づいて行われる計算が好適に適用される。1つのエポックから別のエポックへの衛星の配座状態の変化が計算の中に含まれる。 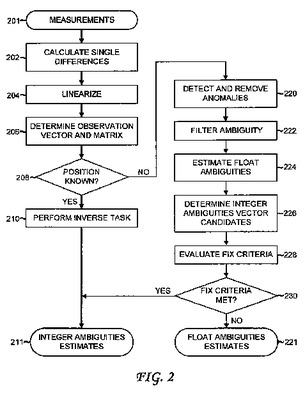 (もっと読む)
(もっと読む)
拡張SPS軌道情報を用いた位置特定のための方法および装置

【課題】じかに衛星からまたは場所支援サーバから必要なアルマナックおよび/またはエフェメリスをダウンロードする頻度を減らす。
【解決手段】サーバが、衛星の大まかな軌道データと衛星の正確な軌道データとの間の訂正を計算する。訂正の変化が時間を通じて大幅に滑らかになるよう座標系を選択する。サーバはさらに、移動局への伝送に必要なビット数を減らすために、数学関数を用いて訂正を概算する。移動局は、係数を受信すると、係数および適用時間(たとえば現在の時間)を用いて数学関数を評価し、評価した結果を標準的な座標系に変換し、変換結果を大まかな軌道データに適用して正確な軌道データを取得する。
(もっと読む)
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 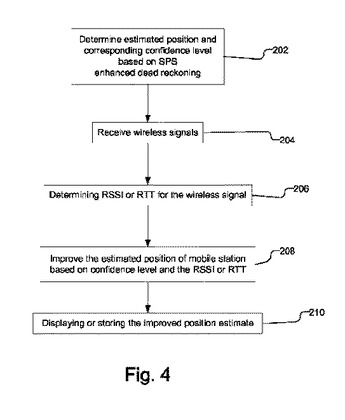 (もっと読む)
(もっと読む)
位置特定方法、測位システム及びプログラム

【課題】マルチパスによる計測誤差の影響を低減し、精度よく通信端末の位置を特定する。
【解決手段】位置を特定するための計測距離を、当該計測距離の信頼性が低い場合にほぼ零となる値を出力し、それ以外の場合に計測距離に応じた値を出力する評価関数を用いて評価する。これにより、計測距離に含まれる誤差が大きい場合には、当該計測距離を除外し、信頼性の高い計測距離のみに基づいて、通信端末の位置を特定することが可能となる。このため、マルチパスによって計測距離に誤差が含まれたとしても、精度よく通信端末の位置を特定することができる。
(もっと読む)
無線測位システム、無線測位方法、及び、プログラム
【課題】無線を用いて位置を測位するのに好適な無線測位システム等を提供する。
【解決手段】本発明に係る無線測位システムは、移動端末と無線通信を行う通信部と、移動端末と無線通信が行われるいずれかの基地局の位置と、当該移動端末の位置と、の距離を測定して算出する測距算出部と、各基地局と移動端末との距離を示す測距データを、累積して記憶する記憶部と、複数の測距データのうち、所定範囲に含まれるデータを、代表距離データとして抽出する抽出部と、各基地局に対応付けられる各代表距離データに基づいて、当該各基地局と移動端末との各代表距離を算出し、当該各代表距離に基づいて、当該移動端末の位置を測位する測位部と、を備える。
(もっと読む)
無線LANAPを利用した無線デバイスの位置追跡システム及び方法
【課題】無線LAN APを利用した無線デバイスのリアルタイム位置追跡システム及び方法を提供すること。
【解決手段】本発明の位置推定基盤データを構築する方法は、APの目録、該APの信号強度を含むAPスキャンデータ、及びAPスキャンデータを測定した位置を提供されるステップと、前記収集されたAPスキャンデータ及び前記位置のうち、少なくとも一つに対して信頼度を計算するステップと、前記計算された信頼度と、前記収集されたAPスキャンデータと位置を対応させて位置推定基盤データとして格納するステップとを含む。
(もっと読む)
測位装置及びプログラム
【課題】擬似距離誤差を精度良く算出して、受信位置を精度良く算出できるようにする。
【解決手段】測位演算部26によって、複数の測位衛星の擬似距離に基づいて、測位衛星の組み合わせ毎に、受信位置を算出する。高度誤差算出部30によって、測位衛星の組み合わせ毎に、高さ誤差を算出する。正常衛星選択部32によって、正常な測位衛星を4つ選択する。観測誤差算出部34は、測位衛星の組み合わせ毎の高さ誤差と擬似距離誤差との関係式、及び正常な測位衛星についての高さ誤差と擬似距離誤差との関係式を含む連立方程式を解くことにより、複数の測位衛星の擬似距離誤差を算出する。誤差補正測位演算部36によって、算出された複数の測位衛星の各々の擬似距離誤差を用いて、受信位置を算出する。
(もっと読む)
無線ネットワークでの位置検出
第1のノードAが第1のメッセージを第2のノードBに送信する。第2のノードBは第2のメッセージを第1のノードに送信する。第1のメッセージの送信開始から第2のメッセージの受信開始までの第1経過時間が測定される。第1のメッセージの受信開始から第2のメッセージの送信開始までの第2経過時間が測定される。第2のノードBは第2経過時間を含む第3のメッセージを第1ノードAに送信する。第1のノードAと第2のノードBとの間の距離は、第1経過時間と、第2経過時間と、第2のメッセージに含まれるカウント校正乗数または第3のメッセージに含まれるカウント校正乗数とに基づいて演算される。ノードは無線メッシュネットワーク内を移動してもよい。ノードの位置情報及び当該ノードから近隣のノードまでの距離が測定され、ネットワークマネージャに送信されて蓄積される。 (もっと読む)
位置情報補正システム
【課題】 歩行者用の領域等の設定がなくても、歩行者の位置情報を精度よく補正することが可能な位置情報補正システムを提供する。
【解決手段】 サーバ装置は、携帯端末から受信した位置情報と精度情報を時刻情報と対応付けて逐次記憶し、記憶手段に記憶された位置情報のうち、対応する精度情報が所定の精度を満たしていないもの(▼)について、当該位置情報より、それぞれ時間的に先、後であって、精度情報が所定の精度を満たしている先行位置情報(●)、後続位置情報(●)を抽出し、当該先行位置情報、後続位置情報および対応する時刻情報に基づいて、推測される位置(□)に補正する。
(もっと読む)
位置推定システム及び位置推定方法
【課題】送信装置から無線信号を送信し、無線信号の受信レベルを複数地点で観測することによって送信装置の位置を推定する位置推定システムにおいて、推定精度を向上し、また、演算処理の軽減を図る。
【解決手段】受信装置12_11〜12_MNMは、送信装置11からの無線信号を受信し、その受信レベルを複数地点で観測する。平均化部131は、無線信号の波長の1倍以上の範囲の観測点を受信群とし、各観測点で観測された受群毎の観測点の平均化位置情報とを用いて、送信装置11の位置を推定する。波長の1倍以上の範囲で受信レベルの平均化を行うと、伝搬減衰の瞬時変動の項が0dBとなり、受信レベル間の相関が0となる。これにより、レイリー分布のばらつきや、受信レベルの相関信レベルを平均化する。送信位置推定部132は、受信群毎の平均化受信レベルと、受信性による推定精度の低下を防げる。
(もっと読む)
測位システム
【課題】GNSSにより測位される位置の誤差を推定することができる測位システムを提供すること。
【解決手段】衛星から受信した電波の到達時間から車両と衛星間の観測距離を計算する観測距離計算手段と、衛星から受信した位置情報に基づき所定時間の衛星の移動量ベクトルを推定する衛星移動ベクトル推定手段と、車両が走行しているリンクの勾配を推定する勾配推定手段と、車両の移動方向と前記勾配から、所定時間の車両の移動量ベクトルを推定する車両移動ベクトル推定手段と、衛星の移動量ベクトルと車両の移動量ベクトルとを比較して、衛星と車両間の推定距離の変化量を推定する距離変化量推定手段と、所定時間の観測距離の変化量を求め、推定距離の変化量と比較して衛星から受信する電波の信頼度を推定する信頼度推定手段と、信頼度に応じて衛星から受信した電波を処理し、車両の位置を推定する測位手段と、を有することを特徴とする測位システムを提供する。
(もっと読む)
位置探索装置および位置探索方法
【課題】電波特性取得装置の数を増やすことなく、電波発信装置の測位の精度を向上させる位置検索装置および位置探索方法を提供する。
【解決手段】位置探索装置が移動体に搭載されて移動されることにより、当該移動体の移動経路において前記電波特性取得装置により検出される前記電波特性情報と、当該電波特性情報を検出した際に前記位置取得装置によって検出される前記位置情報とに基づき、前記推定位置情報を算出する。
(もっと読む)
位置算出装置、位置算出方法及び位置算出プログラム
【課題】 局所領域ごとに算出された位置座標を1つの座標系に統合する。
【解決手段】 位置算出装置20の局所座標算出部230は、それぞれ複数のセンサから構成される複数の局所領域を検出し、各センサと送受信端末10との間の距離に基づいて、局所領域それぞれにおいて、当該局所領域を構成する複数のセンサの位置座標を算出する。統合領域抽出部241は、複数の局所領域のうち、所定数のセンサを共有する2つ以上の局所領域を、互いに統合可能な領域として抽出する。統合処理部242は、抽出された局所領域それぞれにおいて、センサ間距離及びセンサ間距離の信頼度を算出し、センサ間距離の信頼度によって重み付けを行なって重み付け補正後のセンサ間距離を算出し、前記重み付け補正後のセンサ間距離の加重平均に基づいて、局所領域を統合した座標系における各センサの位置座標を算出する。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】現在位置を測定して位置データを記録していく測位装置において、一連の位置データにより詳細な移動軌跡を表すことができ、且つ、位置データの全体の記録量がさほど大きくならないようにする。
【解決手段】現在位置の測定を行う測位手段と、この測位手段の測定によって順次取得される一連の位置データの記録制御を行う記録制御手段とを備えた測位装置、並びに、その位置データの記録方法およびプログラムにおいて、一連の位置データにより示される移動軌跡の曲り箇所(D2,D3,D4,D5)の判別を行って、曲り箇所と判別されない部分の位置データを省いて、曲り箇所と判別された部分の位置データのみを記録させる。
(もっと読む)
無線測位方法
受信ノードで送信ノードとの距離を求めて位置を測位する方法であって、送信ノードから測位信号を受信して遅延タブを測定し、遅延タブを用いて受信ノードと送信ノードとの間の距離を臨時に決定し、基準距離と比較した後、伝播遅延を用いた距離推定方法および遅延拡散を用いた距離推定方法のいずれか1つを選択して最終距離を推定する。 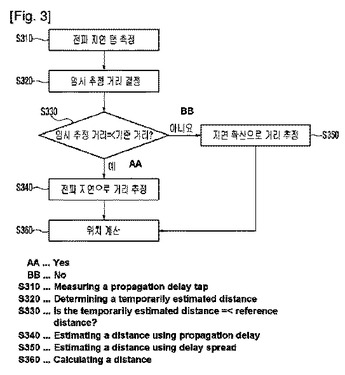 (もっと読む)
(もっと読む)
ユーザ装置の測位方法、測位装置及びコンピュータプログラム
ネットワーク内のアクセスポイントからデータを収集することを行うユーザ装置の位置を推定する方法が開示される。データはアクセスポイント間の或る関係を規定するために使用され、その関係は例えば送信信号が受ける電力損失である。その関係は、ネットワーク内のユーザ装置の位置を判定するためにマトリクス、データベース又はその他の任意の適切な参照可能なストレージ手段に保存され、ネットワーク内のユーザ装置の位置を判定するためにユーザ装置からの対応する測定値と相関が計算される。  (もっと読む)
(もっと読む)
測位方法および装置
【課題】本発明は測位装置に関し、マルチパス多発地帯でも受信手段の出力の異常判定を正確に行い、測位装置の位置精度の低下を防ぐ方法および装置を提供する。
【解決手段】上記課題は、擬似距離から算出された受信位置と、ドップラ周波数から算出された受信速度及び受信方位を分けてそれぞれの有効性判定を行うことにより、受信状況が直達波,直達波と反射波の合成波,反射波であるかを判定し、直達波を受信している時には受信位置を測位位置とし、直達波と反射波の合成波を受信したときでも、受信速度及び受信方位を有効と判定できる場合には、直前の受信位置を基に受信速度及び受信方位から測位装置の位置を補正して測位位置を求めることにより解決される。
(もっと読む)
位置決定におけるナビゲーションデータを処理するための方法と装置
【課題】不適切な信号が、移動局の位置決定の測定値として、誤って識別されないようにする。
【解決手段】移動局で受信された位置決定信号から、移動局についての位置決定のための複数の測定値を決定し、複数の測定値間の整合性を決定する前に、複数の確率推定を生成するために、複数の測定値の各々が誤警報である確率を推定する。測定値を使用して移動局の位置を決定する。そして推定した誤警報確率インジケータを使用して、決定した位置が受け入れ可能か判断する。
(もっと読む)
無線ネットワークシステム
【課題】無線通信端末が複数ある場合でも全ての無線通信端末の位置を検出することができる無線ネットワークシステムを提供すること。
【解決手段】回転可能な指向性アンテナ26とLCD35とを有する複数の無線通信端末1〜8を具備し、一つの無線通信端末1の指向性アンテナ26を回転させながら他の無線通信端末2〜8の指向性アンテナ26からの端末識別情報を受信し、指向性アンテナ26の向きと受信された端末識別情報とに基づいて全ての無線通信端末1〜8の位置を検出し、全ての無線通信端末1〜8の位置をLCD35に表示する。
(もっと読む)
無線測位システムおよび測位方法
【課題】比較的容易な演算を付加して測位システムのハードウェア的な資源を増やさなくても測位信頼度および測位精度を高めることが可能な無線測位システムおよび測位方法を提供する。
【解決手段】本発明の無線測位システムは、測位対象物から順次受信されるパルス間の時間間隔に対して標準偏差値を算出し、その標準偏差値から信頼度を算定する少なくとも一つの測位ノード(受信部)と、前記各測位ノードから前記信頼度の含まれたメッセージを受信して前記測位対象物(送信部)の位置を求める測位サーバーとを含み、測位対象物と各測位ノード間の距離値を補完して測位解像度を高めることができるうえ、各測位ノード別に信頼度値をモニタリングすることにより、当該ノードの測位性能を容易に観察することができ、測位ノードの性能観察および保守の尺度とすることができる。
(もっと読む)
221 - 240 / 675
[ Back to top ]