
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
241 - 260 / 675
位置決定におけるナビゲーションデータを処理するための方法と装置
【課題】不適切な信号が、移動局の位置決定の測定値として、誤って識別されないようにする。
【解決手段】移動局で受信された位置決定信号から、移動局についての位置決定のための複数の測定値を決定し、複数の測定値間の整合性を決定する前に、複数の確率推定を生成するために、複数の測定値の各々が誤警報である確率を推定する。測定値を使用して移動局の位置を決定する。そして推定した誤警報確率インジケータを使用して、決定した位置が受け入れ可能か判断する。
(もっと読む)
測位装置、測位方法およびプログラム

【課題】 自律航法機能とGPS等の測位手段とを併用して、移動経路上の複数地点の測位を行う場合に、最終的に正確な各地点の位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 現在位置の測位が可能な測位手段と、自律航法用センサの計測データによって移動経路の位置情報を算出する自律航法機能とを備えた測位装置において、移動経路上の第2基準地点Bについて、自律航法機能により算出された位置情報が表わす位置B1と、測位手段の測位結果が表わす位置Bとの差を表わすベクトルVbに基づき、該ベクトルVbを第1基準地点Aからの移動距離に応じた係数で乗じた補正ベクトルVxを、自律航法機能により算出された移動軌跡(T1)に加算して補正後の位置情報(T2)を取得する。
(もっと読む)
通信装置、通信方法、プログラムおよび通信システム
【課題】測位を行うための設備を基地局に設置するために要する手間と費用を低減するとともに基地局と通信を行うことができない状況においても端末において測位を行うために要する時間を短縮することが可能な、新規かつ改良された技術を提供する。
【解決手段】第2通信装置200Aは、所定数の衛星のそれぞれの軌道を示す第1衛星軌道情報と第1通信装置の位置を示す位置情報とを含む測位情報を第1通信装置から無線信号によって受信する測位情報受信部233と、測位情報受信部233によって受信された測位情報をもとに所定数の衛星のうち自装置が受信することが可能な衛星信号を送信する複数の衛星を特定する初期化処理を行う初期化処理部251と、を備える。
(もっと読む)
測位システム及び制御方法
【課題】移動局のビーコン送信機12の測位において、各地点の電界強度を事前に実測すること及びビーコン受信機11−ビーコン送信機12間の距離を計算することを省略し、かつビーコン受信機11の配備数を少なくする。
【解決手段】ビーコン送信機12は、ID情報付きビーコンを周囲へ発射する。複数のビーコン受信機11は、測位空間19内にほぼ等密度で分布して配備され、受信したビーコンの電界強度を測定する。基地局15では、各ビーコン受信機11からのビーコン情報を受信し(S51)、ビーコン受信位置情報テーブルを参照して、ビーコン情報送信元のビーコン受信機11の位置を求める(S52)。さらに、ビーコン受信機11の各位置と同一IDのビーコンについての各ビーコン受信機11における電界強度の比とに基づきビーコン送信機12の現在位置を算出する(S53)。
(もっと読む)
測位装置及びプログラム
【課題】自律航法情報等の外部データを必要とすることなく、測位精度を適切に評価する。
【解決手段】GPS受信機16から出力されたクロックバイアス誤差を含む疑似距離から、クロックバイアスBe及び受信位置を算出し、過去n点のクロックバイアスBe、またはGPS受信器から出力されるドップラー情報に基づいてクロックドリフトDを算出し、算出されたクロックドリフトDに基づいて、回帰式、またはカルマンフィルタを用いて基準クロックバイアスBsを推定する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
衛星からの測位データを用いた測位方法及び測位装置
【課題】測位の精度を向上させる。さらに、装置の低コスト化を実現する。
【解決手段】以下のステップを備える:
(1)測位データを供給する複数の衛星でそれぞれ構成される複数の組を用いて、複数の仮想測位点を算出するステップ;
(2)前記複数の仮想測位点から、第1空間中心を算出するステップ;
(3)前記各仮想測位点について、前記第1空間中心からの外れ距離を算出するステップ;
(4)前記外れ距離に対する、前記各衛星の責任量を算出するステップ;
(5)前記責任量が基準値以上である前記衛星(以後「マルチパス衛星」という)を判別するステップ;
(6)前記マルチパス衛星が関与する仮想測位点を除いた、前記仮想測位点を用いることにより、受信位置を算出して出力するステップ。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
マルチパス信号信頼度判定方法、コード位相誤差算出方法、コード位相算出方法、位置算出方法及びマルチパス信号信頼度判定装置
【課題】マルチパス信号の善し悪しを判定する新たな仕組みを提案すること。
【解決手段】携帯電話機1は、GPS衛星から発信されたGPS衛星信号を受信した受信信号と、レプリカコード生成部により生成されたレプリカコードとを乗算する相関演算処理を行って相関値を算出する。そして、相関演算処理により求められたピーク相関値と、当該ピーク相関値を示したピーク位相からM(1≦M<2)チップ遅れた位相の相関値とを用いてPL値を算出し、算出したPL値に基づいて、受信信号がマルチパス信号である場合の当該マルチパス信号の信頼度を判定する。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
不連続衛星測位システム追跡における搬送波位相処理
探索の不連続の後、衛星測位システム信号の初期サンプリングを利用してコモンコード位相オフセットと、擬似レンジレートと、位置計算のモードとを決定する、位置判断のための装置、システムおよび方法が開示される。 (もっと読む)
ナビゲーション装置
【課題】センサフュージョンに利用するセンサが増えた場合であっても、現在地の推定に必要な計算量が低く抑えられたナビゲーション装置を提供する。
【解決手段】ROM34には、種々の状況において各センサに与えられる重みが設定された特性テーブルが記憶されている。CPU31は、現在地の推定処理を行った後、推定された現在地、地図データ、および実行中の処理などの情報を特性テーブルに当てはめ、各々のセンサの重みを算出する。4つのセンサ22a〜22dのうち、重みが所定のしきい値よりも小さいセンサは、CPU31が制御するスイッチ群32により遮断され、CPU31への検出値の出力が行われなくなる。その結果、CPU31はこのセンサを現在地の推定に利用しなくなる。
(もっと読む)
屋内外判定装置及び屋内外判定方法
【課題】 測位方法の選択の目的等に応じて適切に移動通信端末の屋内外判定を行う。
【解決手段】 測位サーバ10は、移動通信端末20が屋内に位置しているか屋外に位置しているかの屋内外判定を行う屋内外判定装置であって、移動通信端末20における無線通信に関する通信情報を取得する通信情報取得部11と、移動通信端末20に係る環境を示す環境情報を取得する環境情報取得部12と、環境情報に応じて屋内外判定を行うための判定基準を設定する判定基準設定部13と、設定された判定基準に基づいて通信情報を参照して前記屋内外判定を行う判定部14とを備える。
(もっと読む)
広帯域相互関係モード切換方法及び装置
【解決手段】 方法と装置は、波形相関結果処理を実行することを動作可能に有効にする機器ために提供される。 (もっと読む)
セルラネットワークにおける測位支援方法及び装置
本発明は、最少の支援データ信号通知による測位支援方法及びデバイスに関する。位置測定を実行する無線デバイスにおける方法は、セル識別子及びセル識別子と測位基準信号パターン間の予め定義された対応付けに基づき測位基準信号パターンを決定するステップ(440)と、決定する測位基準信号パターンに基づき位置測定を実行するステップ(450)と、を含む。 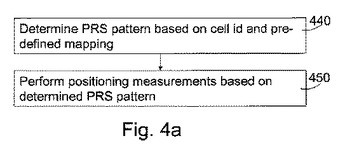 (もっと読む)
(もっと読む)
無線通信システムにおける環境評価
無線通信システムを取り巻き、送信信号を変曲させる少なくとも一つのインフレクタを含む環境を評価する方法及びシステムが記載される。観測発生装置(300)は、送信機から受信機へ無線通信チャネルを介して送信した入力信号を受信し、また受信機、送信機及びインフレクタの少なくとも一つに関連するシステム状態情報を受信する。観測プロセッサ(302)は、観測発生装置(300)からの観測(303)を使用して、受信した入力信号及びシステム状態情報に基づいてインフレクタの少なくとも一つの特性を評価する。 (もっと読む)
GPS衛星信号の品質監視機能を有するGPS衛星信号品質監視方法及びGPS衛星信号の品質監視機能を備えたGPS衛星信号品質監視装置
【課題】単独のGPS受信機により、GPS衛星の故障による信号歪みを検出するとともに、この信号歪みによりどれだけ誤差が検出されたかを実際の数値として判定するGPS衛星信号品質監視方法およびGPS衛星信号の品質監視機能を備えたGPS衛星信号品質監視装置を提供する。
【解決手段】GPS受信機内で捕捉したいGPS衛星に対応するC/Aコードを生成し、このC/Aコードと受信信号のC/Aコードとの相関をとり、追尾点における相関値を用いて左右対称でない相関点の組み合わせとすることにより不感を解消し、信号歪みをみるとともに、相関点の交点と追尾点の測距値差を求め、この信号歪みによりどれだけ誤差が検出されたかを実際の数値として判定する。
(もっと読む)
端末位置推定方法、測位データ処理方法、プロセッサ及びコンピュータ読み取り可能な媒体
少なくとも1つの固定ノードを有する無線ネットワークのカバレッジエリア内の端末の位置を推定する方法は、端末と固定ノードの何れかとの間の無線チャネルの複素周波数応答を測定し、測定された複素周波数応答の第1メトリックを表現するデータと、複数の保存されているメトリックを表現するデータとを比較することに少なくとも基づいて、端末の位置を推定するステップを有し、複数の保存されているメトリックの各々は、無線ネットワーク内の複数の異なる位置の何れかに関連し、保存されているメトリックの各々は、固定ノードの何れかとメトリックが関連している無線ネットワーク内の位置との間で測定された複素周波数応答である。 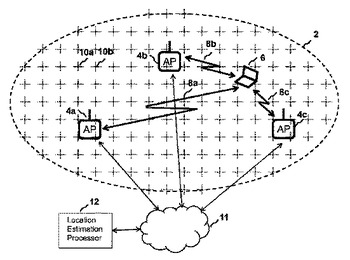 (もっと読む)
(もっと読む)
移動端末装置
【課題】アシスト測位を利用して自己位置を検出する場合に、自己位置を誤認識することを防止する移動端末装置を提供する。
【解決手段】移動端末装置20は、追跡センター100からの問い合わせにより位置検出処理を起動し(S402、S404)、自己位置を検出するためのネットワークアシストを通信ネットワーク30に要求する(S406)。通信ネットワーク30からアシスト情報を受信すると(S408)、アシスト情報に基づいてGPS信号を受信し(S410)、受信したGPS信号を通信ネットワークに送信する(S412)。GPS信号に基づいて演算した位置座標を測位位置として通信ネットワーク20の測位サーバから受信すると(S414)、移動端末装置20は、S400で取得した基地局の位置座標と測位サーバから取得した測位位置とを比較し(S416)、適切な位置を自己位置として追跡センター100に通知する(S418、S420)。
(もっと読む)
位置推定システム
【課題】マルチパスの影響を受けることなく、また赤外線投光部や赤外線受光部を設けることなく、高精度に移動体の現在位置を推定する。
【解決手段】位置推定対象エリア1を小区画に区切ったセルCL毎にタグ受信機3および人感センサ4を設ける。人Xに無線タグTGXを所持させ、人Yに無線タグTGYを所持させる。無線タグTGX,TGYは識別情報IDX,IDYが付された電波を発する。人感センサ4が検出するセルCL毎の人の在不在を示す情報を位置推定装置2へ送る。タグ受信機3で検出される識別情報が付された電波の強度を位置推定装置2へ送る。位置推定装置2は、人感センサ4が検出するセルCL毎の人の在不在の検出結果をマップA、タグ受信機3が検出するセルCL毎の同一の識別情報が付された電波の強度をマップB、マップAとマップBのセルCL毎のアンド情報をマップCとし、マップA,B,Cを用いて、位置推定対象エリア1に位置する人X,人Yの現在位置を推定する。
(もっと読む)
241 - 260 / 675
[ Back to top ]