
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
401 - 420 / 675
変換係数の導出方法およびナビゲーション装置

【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
変換係数の導出方法およびナビゲーション装置

【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
車両位置特定装置
【課題】直接波を受信可能な衛星の数が少ない場合においても車両の位置を十分な精度で特定可能な車両位置特定装置を提供すること。
【解決手段】複数のアンテナ素子における受信波の位相及び受信波に含まれている信号に基づき各衛星からの電波到来方向と衛星方位が一致するか否かを判定し、一致すると判定した衛星の数が所定数以上である場合は電波到来方向と衛星方位が一致すると判定した衛星からの電波に含まれている信号により算出される伝播経路長を用いて車両の位置を算出し、所定数未満である場合は電波到来方向と衛星方位が一致すると判定した衛星からの電波に含まれている信号により算出される伝播経路長と電波到来方向と衛星方位が一致しないと判定した衛星からの電波に含まれている信号に補正値を加味して算出される伝播経路長とを用いて車両の位置を算出する算出手段を備える、車両位置特定装置。
(もっと読む)
通信端末装置及びプログラム
【課題】 省電力性を追求しつつ現在位置情報の要求から取得までの時間の短縮化を図る。
【解決手段】 現在位置で接続可能な基地局が記憶手段に記憶されている基地局情報と一致すると判別された場合に、該基地局に関連付けて前記記憶手段に記憶されている、場所を表す任意の情報を通知する。通知される任意の情報は、記憶手段に記憶されていた情報であり、位置取得手段によって取得された現在位置ではない。このため、位置取得手段による情報取得のような遅れを生じないので、要求元への通知時間の短縮化を図ることができる。加えて、位置取得手段を使用しないので、たとえば、この位置取得手段がGPS信号に基づいて現在位置情報を取得するものである場合に、省電力性も図ることができる。
(もっと読む)
移動通信端末
【課題】無線通信ネットワークの圏内から圏外に移動したときでもGPS機能を発揮し得る移動通信端末を提供する。
【解決手段】移動通信端末1では、GPS受信部16,17は、内蔵GPSアンテナ11Gを介して衛星電波を受信し、この衛星電波に基づいてGPS信号を生成する。接続検出部18は、外付けGPSアンテナ2がコネクタ15に接続された状態を検出する。このとき、GPS処理部14Aは、スタンドアロン測位モードの状態をオフからオンに切り替え、このスタンドアロン測位モードに従ってGPS信号を捕捉し、当該捕捉結果に基づいて測位演算を実行し得る。
(もっと読む)
精度不良を検出するための装置を備えるナビゲーションシステム
【課題】電離層誤差データを用いて、保護限界を精度良く求める。
【解決手段】複数の送信機から複数の信号を受信するように動作可能な受信機を有する車両用のナビゲーションシステムは、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、当該命令は、プロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主ナビゲーション解の誤差共分散行列を求めること、及び解分離技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
位置検知システム、位置検知サーバおよび端末
【課題】壁やパーティションが存在する屋内を移動する測位対象の確度の高い位置を検知可能とする。
【解決手段】位置検知サーバは、壁により発生する電波強度の減衰を地図情報を用いて補正して誤差の小さいAP機と端末間の距離を求め、この距離から電波の特性により電波強度のブレが生じることを許容した端末の位置を端末の存在領域として求める領域演算手段と、この端末の存在領域を、位置履歴から推定した端末の状態に応じた端末の行動可能範囲で制限し、さらに地図情報を用いて端末の直前位置から見て壁で遮られている箇所を除外し、加えて電波強度履歴からの電波強度の増減により推測した端末の移動方向に絞り込み、絞り込んだ領域に基づいて端末の位置を算出する位置検知手段を備える。
(もっと読む)
衛星航法/推測航法統合測位装置
【課題】低価格で構成でき且つ位置・速度等の航法データの精度を高めた衛星航法/推測航法統合測位装置を構成する。
【解決手段】追尾処理部31は、GPS測位信号に基づいて、その捕捉処理、追尾処理、航法メッセージの復調処理を行う。GPS測位演算部32は擬似距離観測量やドップラー周波数観測量及びエフェメリスデータを基に位置・速度等を演算し、これらを出力判定部43と追尾処理部31へ与える。統合測位演算部42は擬似距離観測量やドップラー周波数観測量の他に、慣性センサの出力や地図情報又は地図位置と測位との差の情報等の外部支援情報に基づいて、位置・速度などを推定し、出力判定部43へ与える。出力判定部43はGPS測位演算部32の出力と統合測位演算部42の出力とを比較し、統合測位演算部42の出力データの信頼性判定や外部支援データの異常判定を行う。
(もっと読む)
リアルタイムのマルチパスの検出および軽減
【課題】マルチパス誤差検出システムを提供する。
【解決手段】マルチパス誤差検出システム(100)は、衛星(115)から右円偏波信号を受信するように構成された第1のアンテナ(105)と、衛星(115)から左円偏波信号を受信するように構成された第2のアンテナ(110)とを含む。少なくとも1つのプロセッサ(130)は、第1および第2のアンテナ(105、110)と信号通信し、右円偏波信号および左円偏波信号から、第1のパラメータの第1および第2の値、ならびに第2のパラメータの第3および第4の値を求めるようにプログラムされる。少なくとも1つのプロセッサ(130)は更に、これらの値に基づいて、偏波信号の少なくとも1つに関連するマルチパス誤差の存在を判定するように構成される。
(もっと読む)
電離層電子密度分布推定システム及び測位システム
【課題】伝播経路電離層総電子数を精度よく推定して電離層の電子密度分布を推定する電離層電子密度分布推定システム及び測位システム。
【解決手段】変形カルマンフィルタを使用してサイクルスリップの有無を判定することにより継続したデータ収集期間を特定するフィルタ処理部21と、フィルタ処理部によって特定されたデータ収集期間について、キャリア位相に関連した不確定値を除去した後の複数キャリア位相擬似距離差を電離層電子数に変換する電離層総電子数推定部22と、電離層総電子数推定部で得られた電離層電子数を用いて電離層の電子密度分布を推定する電子密度推定処理部22aを備える。
(もっと読む)
GPSデータ処理装置
【課題】複数のGPS基準局からの補正情報を選択的に切替えながら取得して相対測位をした場合に、各GPS基準局の設置位置誤差によって移動局での測位で得られた経路が不連続にならないGPSデータ処理装置を提供する。
【解決手段】GPS基準局の各々の設置誤差データを記憶すると共に、GPS受信機で算出された移動局の位置データに対し、受信しているGPS基準局の設置誤差データで修正演算する位置修正演算装置と、この修正演算結果を表示するモニタ装置を備える。GPS受信機はGPS衛星から受けたGPS情報と切替えられたGPS基準局から受けた補正情報とから移動局の位置データを算出し、前記位置修正演算装置は前記算出された位置データに対し、切替えられて受信しているGPS基準局の設置誤差データで修正演算して位置データを得る。
(もっと読む)
精度不良を検出する装置を備えるナビゲーションシステム
【課題】位置解の精度不良を検出し、保護レベルを精度よく算出する。
【解決手段】複数の送信機から複数の信号を受信するように動作することができる受信機14を有する車両用のナビゲーションシステム12は、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、この命令はプロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主航行解のための誤差共分散行列を求めること、及びパリティ空間技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
計時装置および計時装置の衛星信号受信方法
【課題】衛星信号を短時間で受信でき、消費電力も低減できるとともに、受信環境の影響を軽減できて受信に成功する確率を向上できる計時装置を提供すること。
【解決手段】GPS付き腕時計は、位置情報衛星を捕捉して衛星信号を受信する受信部と、受信した衛星信号に基づいて時刻情報を生成する時刻情報生成部と、時刻情報を表示する時刻表示部と、前記受信部を制御する受信制御部50とを備える。受信制御部50は、受信処理を行う前に受信環境を判定する判定部51と、1つの位置情報衛星を捕捉し、その位置情報衛星から送信される衛星信号に基づいて時刻情報を取得する一衛星サーチモードと、複数の位置情報衛星を捕捉し、それらのうちの1つの位置情報衛星から送信される衛星信号に基づいて時刻情報を取得する複数衛星サーチモードとを、判定部51の判定結果に基づいて選択するサーチモード選択部52を備える。
(もっと読む)
行動範囲把握方法および行動把握装置
【課題】GPS座標のような位置情報を用いずに、小型の端末を携帯するだけで、ユーザの移動経路のトポロジーを推定し、常時ユーザの行動を把握することができる行動範囲把握方法および行動把握装置を提供する。
【解決手段】行動把握装置100は、IEEE802.11のアクセスポイントが定期的に送信するビーコン信号を受信し、周辺に存在するアクセスポイントを特定する検出部101、特定されたアクセスポイントを検出周期毎の履歴データとして記憶する履歴保存部102、アクセスポイントの組み合わせが、それより過去の検出周期のものとほとんど一致しなくなる逸脱時刻および高い一致を示すようになる復帰時刻を特定し、逸脱時刻および復帰時刻において、把握済み経路上での位置を推定し、移動経路のトポロジーを推定する経路推定部103、および、移動経路のトポロジーを地図化してユーザの行動範囲として表示する表示部104を備える。
(もっと読む)
コード位相誤差推定方法、コード位相算出方法、プログラム、コード位相誤差推定装置及びコード位相算出装置
【課題】演算量を増加させたり、回路規模を増大させることなく、受信信号がマルチパス信号である場合のコード位相の誤差の補正を適切に行うこと。
【解決手段】受信信号に対する相関演算結果をもとに、Punctual位相の相関値と、Punctual位相からN(0<N<1)チップだけ進んだ位相での相関値との比率であるPE値を算出する。このPE値は、現在追跡しているコード位相(Punctual位相)と実際のピーク位相との誤差ERRとの間には、時間経過に対する増減の方向が略一致するという関係がある。このため、受信信号がマルチパス信号であると判定された場合には、PE値をもとに誤差ERRを算出し、算出した誤差ERRを用いてPunctual位相を補正する。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器
【課題】測位装置の移動状態を適切に判定してフィルタ特性を可変することで、測位精度
の向上を図ること。
【解決手段】携帯型電話機1において、速度補正処理で補正された状態ベクトル「X」か
ら求められる携帯型電話機1の速度「V」に含まれる速度誤差「σV」(速度成分の精度
)が、速度予測処理で予測された誤差共分散行列「P」に基づいて決定され、当該速度誤
差「σV」に基づいて、携帯型電話機1の移動状態を判定するための速度閾値(速度条件
)が設定される。そして、速度補正処理で補正された状態ベクトル「X」から求められる
速度「V」と、先に設定された速度閾値とが比較されて携帯型電話機1の測位モード(移
動状態)が判定され、当該測位モードに応じたプロセスノイズ「Q」(フィルタ特性)で
カルマンフィルタ処理が実行されて、現在位置が測位される。
(もっと読む)
位置検出装置
【課題】移動体の絶対位置を高精度に検出する位置検出装置を提供することを課題とする。
【解決手段】移動体の絶対位置を検出する位置検出装置1であって、移動体の絶対位置を取得する絶対位置取得手段10と、移動体の絶対位置の確率分布を取得する絶対位置確率分布取得手段10と、移動体間の相対位置関係を取得する相対位置関係取得手段11と、3体以上の移動体の絶対位置とその絶対位置の確率分布及びその3体以上の移動体間の相対位置関係に基づいて当該3体以上の移動体の絶対位置を特定する絶対位置特定手段21とを備えることを特徴とする。
(もっと読む)
統合ワイヤレスデバイスロケーション決定のための方法、システムおよび装置
統合ワイヤレスデバイスロケーション決定のための方法、デバイス、およびシステムを提示する。ワイヤレスデバイス上でロケーションを決定するための方法は、ワイヤレスデバイスロケーションの要求を受信することと、複数のワイヤレスネットワークメッセージを受信することとを含む。各メッセージは、複数のワイヤレスネットワークのうちの1つに関連するワイヤレスネットワークエッジデバイスから送信される。さらに、受信したワイヤレスネットワークメッセージからロケーション測定情報を取得することと、受信したワイヤレスネットワークメッセージに関連するワイヤレスネットワークの各々のロケーション決定援助情報を取得することとを含む。本方法は、ロケーション測定情報およびロケーション決定援助情報に基づいて2つ以上のワイヤレスデバイスロケーションを決定することと、2つ以上のワイヤレスデバイスロケーションに基づいて統合ワイヤレスデバイスロケーションを決定することと、統合ワイヤレスデバイスロケーションを確認し、記憶することとをさらに含む。ネットワークデバイスにおいてワイヤレスデバイスロケーションを決定するための方法をも提供する。 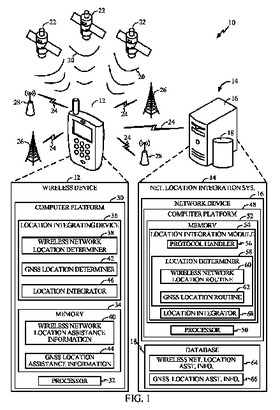 (もっと読む)
(もっと読む)
衛星測位システム使用可能なメディア測定システムおよび方法
【課題】意図された目的(メディアディスプレイ露出)のためにメディアディスプレイ位置のような種々の位置の効果を決定する監視装置を提供する。
【解決手段】監視装置200は、多数の調査応答者に分配されている。監視装置200は応答者の移動を追跡する。応答者の移動を追跡するために種々のテクノロジーが使用されることができるが、監視装置200の位置追跡の少なくともいくつかは、全地球測位システム(“GPS”)のような衛星105の位置決定システムを使用する。応答者および監視装置200のこれらの移動は、ある地点で、いくつかのメディアディスプレイ150への露出と一致する。監視装置によって収集されたジェオデータ(移動データ)は、応答者がどのメディアディスプレイ150に露出されたかを決定するダウンロードサーバ300にダウンロードされる。露出決定は事後処理サーバ400によって行われる。
(もっと読む)
マルチパス信号判定方法、信号適否判定方法、測位演算方法、プログラム及びマルチパス信号判定回路
【課題】演算量を増加させたり、回路規模を増大させることなく、マルチパス信号の判定を適切に行うこと。
【解決手段】相関演算を行った各サンプリング位相の相関値それぞれをIQ座標上に順次プロットした場合に、それらのプロット位置が閉曲線状に配列されているか否か、或いは直線状に配列されていないか否かを検出するといった簡単な方法で、受信信号がマルチパス信号であるか否かを判定する。更に、配列された閉曲線の広さに基づいて、測位に使用可能か否かを判定する。
(もっと読む)
401 - 420 / 675
[ Back to top ]