
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
61 - 80 / 675
異常値判定装置、測位装置、及びプログラム
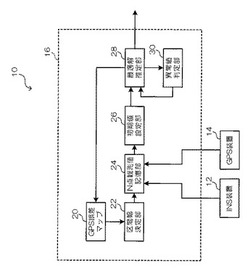
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
運転支援装置

【課題】停車状態でのGPSモジュールにより検出される自車両の位置の精度を判定することができるようにする。
【解決手段】GPSモジュールと、他車両情報取得手段と、衝突可能性判定手段と、情報提供手段とを備える運転支援装置において、自車両から出力される車速パルスに基づいて走行速度を検出する車速検出手段と、車速検出手段により検出された走行速度が0である時に、GPSモジュールにより検出された自車両の位置に基づいて、GPSモジュールの検出結果の有効性を判定するGPS有効性判定手段とを備える。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
油圧ショベルの較正装置及び油圧ショベルの較正方法
【課題】作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正装置及び較正方法を提供する。
【解決手段】油圧ショベルの較正装置は、入力部63と、第1較正演算部65cと、第2較正演算部65dと、を備える。入力部63は、作業点位置情報とアンテナ位置情報とが入力される部分である。作業点位置情報は、外部計測装置で計測された作業点の複数の位置での座標を示す。アンテナ位置情報は、外部計測装置で計測されたアンテナの位置の座標を示す。第1較正演算部65cは、入力部63に入力された作業点位置情報に基づいて、数値解析により作業機パラメータの較正値を演算する。第2較正演算部65dは、入力部63に入力されたアンテナ位置情報に基づいてアンテナパラメータを較正する。
(もっと読む)
受信されるSPS信号における曖昧さを減らすためのシステムおよび/または方法
【課題】衛星ナビゲーションシステムにおけるSV(宇宙船)から受信される信号に関連する曖昧さを解決するためのシステムおよび方法の提供。
【解決手段】第1のSVから、第1の周期的に繰り返されるPN符号で符号化された第1の信号を受信すること202、第2のSVから、第2の周期的に繰り返されるPN符号で符号化された第2の信号を受信すること204、第1のSV1から受信された信号の擬似距離仮説を、第2のSV2から受信された信号の擬似距離仮説と関連付けること206、関連付けられた第1の擬似距離仮説に少なくとも部分的に基づいて、前記第1の信号を変調するデータ信号のビットエッジの位相の曖昧さを減らす208
(もっと読む)
擬似距離誤差推定方法、位置算出方法及び擬似距離誤差推定装置
【課題】擬似距離に含まれる誤差を推定するための新たな手法の提案。
【解決手段】衛星から衛星信号を受信して、受信点から当該衛星までの観測擬似距離を求める。また、受信した衛星信号のドップラー周波数を測定し、当該ドップラー周波数を用いて予測擬似距離を算出する。そして、観測擬似距離と予測擬似距離とを用いて、観測擬似距離に含まれている第1の誤差を推定する。その一方で、所与の受信位置を用いて、観測擬似距離に含まれている第2の誤差を推定する。そして、第1の誤差と第2の誤差とを用いて、観測擬似距離に含まれている真正誤差を推定する。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】高精度でないIMUと1台のGPS受信機とを用いて車両の位置を高精度に標定できるようにすることを目的とする。
【解決手段】初期値算出部110は、車両の出発時に3自由度2次元航法により方位角の初期値を算出する。走行時標定部121は、車両が停車するまで、方位角の初期値または前回の方位角を用いて6自由度3次元航法により位置と姿勢と方位とを標定する。停車時標定部122は、車両が停車している間、方位角を拘束する拡張ZUPTアルゴリズムに基づいて6自由度3次元航法により位置と姿勢と方位とを標定する。
(もっと読む)
運転支援装置
【課題】GPSモジュールから得られる情報に基づく自車両の位置等の検出精度を判定し、かつ当該判定の精度を高める。
【解決手段】GPSモジュール3により検出される自車両1の走行速度と車速検出部13により車速パルスに基づいて検出される自車両1の走行速度との速度差に基づいて、GPSモジュール3により検出される自車両1の位置、進行方位および走行速度の有効性を判定する。さらに、自車両1の加速度に基づいて上記速度差を補正することにより、車速検出部13の応答性とGPSモジュール3の応答性との相違によって上記速度差が過大となることを抑制し、GPSモジュール3により検出される自車両1の位置等の有効性の判定精度を高める。
(もっと読む)
位置計測システム、位置計測装置、位置計測方法およびプログラム
【課題】IN/OUT型のセンサを用いる方式において、センサーノードの設置コストを削減する。
【解決手段】発信機3は、それぞれが所定の周期で識別情報を無線で発信し、ID受信機4は、発信機3が発信する識別情報を受信する。受信情報生成部11は、所定の領域の複数の地点でID受信機4が受信した識別情報を取得し、識別情報ごとの単独受信回数と2つの識別情報の組ごとの受信した地点が同一である同時受信回数を計数して受信情報を生成する。発信機間距離算出部13は、受信情報および発信機3ごとの発信の到達範囲から、2つの発信機3の間の距離を算出する。発信機位置算出部15は、三角形を構成できる3つの発信機3の設置座標と発信機間距離から、残りの発信機3それぞれの設置座標を算出する。
(もっと読む)
高精度解析法による無線測位システム
【目的】本発明は、電波強度の変化特性を取り入れて各発信機から受信機までの距離の計測を行うことで、距離計測の精度を向上せしめ、ひいては無線測位システム自体の信頼性を大きく高めることができる高精度解析法による無線測位システムを提供することを目的とする。
【構成】電波を発信する複数の場所が既知な発信機と、複数の場所が既知な発信機から発信された電波を受信する受信機とを備え、発信された電波の電波強度値を利用して各発信機から受信機までの距離を計測し、計測したそれぞれの距離から受信機の位置を測定する無線測位システムであり、電波強度値を使用しての各発信機から受信機までの距離の計測に際して、各発信機から受信機までの距離の変化に対する電波強度の変化特性を考慮して計測を行い、電波強度の変化特性を考慮した計測値を用いて受信機の位置を計測する、ことを特徴とする。
(もっと読む)
位置検出システム、機器制御システム、及び位置検出方法
【課題】セミパッシブRFIDを用いた位置検出における検出の精度を向上させる。
【解決手段】位置検出システムは、複数のエリアごとに設置され、それぞれがエリアに対応付けられた位置情報を含む信号を周期的に送信する複数の発信部と、発信部が送信する信号を受信すると、該信号に含まれる位置情報、及び予め割り当てられている自機を識別する識別情報を含む信号を送信する電子タグ部と、電子タグ部が送信する信号を受信すると、今回受信した信号に含まれる識別情報と一致する識別情報を含む信号のうち1回前に受信した信号に含まれる位置情報である前回位置情報と、今回受信した信号に含まれる位置情報である今回位置情報と、該識別情報とを含む検出情報を出力する検出情報生成部と、検出情報に含まれる前回位置情報及び今回位置情報の組合せに基づいて、複数のエリアのうち、電子タグ部が位置するエリアを判定する位置判定部とを備える。
(もっと読む)
位置測定システム、誤差補正装置、制御方法、及びプログラム
【課題】対象物の位置を測定すること。
【解決手段】対象物200の位置を測定する位置測定装置110と、位置測定装置110が測定して得られた対象物200の位置情報の誤差を補正する誤差補正装置120とを備え、誤差補正装置120は、位置測定装置110が測定して得られた対象物200の位置情報を、対象物200の周囲の地勢情報に基づいて補正した補正位置情報を出力する補正位置情報出力部を有する。
(もっと読む)
GPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラム
【課題】正確な地図データがない場合であってもGPS信号による移動体の位置決めを正確に行うことができる新規なGPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラムの提供。
【解決手段】人工衛星から発信されるGPS信号を連続的に受信し、受信したGPS信号に基づいて所定時間ごとに前記移動体の位置を算定し、算定された所定時間ごとの移動体の算定位置を記憶し、記憶された移動体の算定位置同士の広がり具合に基づいて前記移動体の停止または移動を判断し、移動体が移動したと判断したときに前記移動体の位置を決定する。これによって、正確な地図データや専用のセンサがなくともGPS信号による移動体の位置決めを正確に行うことができる。
(もっと読む)
移動体測位方法、移動体測位装置
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータをバッファリングすることと、バッファリングされた前記慣性センサーデータを用いてINS測位演算を行うことと、現在時刻に対するGPS測位の遅延時間を計算することと、GPSデータの出力時刻とGPS測位結果とをバッファリングすることと、バッファリングされた前記GPS測位結果とINS測位結果との時刻同期をとることと、バッファリングされた前記慣性センサーデータと、前記慣性INS測位結果と、バッファリングされた前記GPS測位結果と、をカップリングし、位置・速度・姿勢の誤差を推定することと、前記位置・速度・姿勢の誤差を前記INS測位結果にフィードバックし、補正する。GPSデータと慣性センサーデータの時刻同期をとり、正確なINS測位結果の誤差補正を行うことによって、高精度な移動体測位を行うことができる。
(もっと読む)
車両位置検出装置、車両位置検出方法
【課題】本発明では、当該車両位置検出装置のシステム構成を複雑にすることなく、自車両が駐車場等の開けた場所に存在するか否かを判定する車両位置検出装置、及び当該車両位置検出装置による車両位置検出方法を提供することを目的とする。
【解決手段】本発明に係る車両位置検出装置では、複数のGPS衛星から送信される測位信号に基づいて車両位置を検出する車両位置検出装置であって、前記測位信号を検出する測位信号検出手段と、前記測位信号検出手段により検出される前記測位信号に関するマルチパス信号の検出状況に基づいて、前記車両が開けた場所に存在するか否かを判定するオフルート判定手段と、を有することを特徴とする。
(もっと読む)
位置情報送信機
【課題】位置情報送信機が設置された後に生ずる出力信号の偏差を補正することを可能とする位置情報送信機を提供することを目的とする。
【解決手段】人工衛星から送信される測位のための衛星測位信号との互換性を有する測位信号を送信する位置情報送信機であって、水晶に電圧をかけることにより、基準周波数の信号を生成する基準周波数発振部と、基準周波数の信号に電圧をかけることにより、基準周波数よりも大きい第1の周波数の信号となるように制御する第1の周波数制御部と、第1の周波数の信号を用いて、位置情報送信機が設置された位置を示す位置データを変調することにより、測位信号を生成する測位信号生成部と、基準時間を記憶する記憶部と、基準時間からの経過時間を計測する時間計測部と、を備え、経過時間が設定された第1の経過時間となった場合に、水晶にかける電圧を変化させることを特徴とする位置情報送信機である。
(もっと読む)
測位支援装置
【課題】本発明は、位置が既知である複数の送信機の距離を求め、または測位に供する測位支援装置に関し、異なる測位系に共用されるハードウェアの伝搬遅延時間の格差および変化に起因する測位の誤差を確度高く安定に抑圧できることを目的とする。
【解決手段】第一の測位系に属し、かつ位置が既知である複数pの送信機から個別に到来した無線信号を処理することにより、前記複数pの送信機の距離を求める測位支援装置であって、前記第一の測位系と同じ航法が適用された第二の測位系において位置が既知である複数p′の送信機から個別に到来した無線信号に基づいて同時に行われる測位に供され、かつ前記測位の過程で時計が与える時刻T′と、前記処理の過程で前記時計が与える時刻Tの前記時刻T′に対する偏差が圧縮された時刻との何れかを前記処理に適用する手段を備える。
(もっと読む)
移動端末位置推定装置、移動端末位置推定方法及び電波環境指標算出方法
【課題】
RSSI(Received Signal Strength Indicator:受信電界強度)を利用した移動端末の位置推定は、フェージングとNLOS(Non Line Of Sight:見通し外)、すなわち電波環境の影響で、位置推定の誤差が一定しないという問題がある。
【解決手段】
移動端末は、アクセスポイントから送信される信号を帯域可変して受信してRSSIを算出し、そこから電波環境指標を算出する。この指標算出をアクセスポイント毎に行うことによって位置推定時の各アクセスポイントの重みづけに用いる。
(もっと読む)
無線端末位置計測システム
【課題】無線端末の存在する階層とは異なる階層にある無線基地局の測位情報を除去し、多階層建築物における算出位置誤差を著しく低減させることができる無線端末位置計測システムを提供する。
【解決手段】多階層建築物の各階層内を移動し無線信号を送出する無線端末と、前記多階層建築物の各階層内に設けられ、前記無線端末からの無線信号の電波特性パラメータを求めて送出するとともに、前記受信した無線信号の受信強度を求めて受信強度情報を送出する複数の無線基地局と、これら無線基地局からの電波特性パラメータと受信強度情報を収集し、この収集した受信強度情報に基づき、閾値以上の受信強度で無線信号を受信した無線基地局の数が最大となる階層を無線端末の存在する階層と推定し、前記収集された電波特性パラメータのうち前記推定された無線端末の存在する階層に存在する無線基地局の電波特性パラメータに基づき無線端末の位置を算出する測位計算部とからなる。
(もっと読む)
測位装置及び測位方法
【課題】ターゲットの測位精度を高めることができる測位装置及び測位方法を得ることを目的とする。
【解決手段】測位処理部8によるターゲットの測位値を用いて、測角観測部2により観測された全ての測角値の残差及び電力観測部3により観測された全ての電力観測値の残差を算出して、全ての測角値の残差と全ての電力観測値の残差との総和を算出する残差総和算出部9を設け、グループ更新処理部10が、残差総和算出部9により算出された残差の総和が最小になるように、各測角値の属するグループを更新する。
(もっと読む)
61 - 80 / 675
[ Back to top ]