
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
81 - 100 / 675
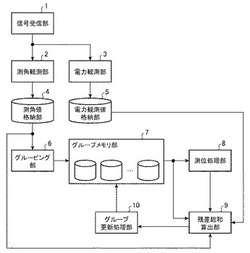
測位装置及び測位方法
【課題】ターゲットの測位精度を高めることができる測位装置及び測位方法を得ることを目的とする。
【解決手段】測位処理部8によるターゲットの測位値を用いて、測角観測部2により観測された全ての測角値の残差及び電力観測部3により観測された全ての電力観測値の残差を算出して、全ての測角値の残差と全ての電力観測値の残差との総和を算出する残差総和算出部9を設け、グループ更新処理部10が、残差総和算出部9により算出された残差の総和が最小になるように、各測角値の属するグループを更新する。
(もっと読む)
情報処理装置および情報処理方法

【課題】 高架道路および高架下道路のいずれかを車両が走行している際に、走行している道路が高架道路か高架下道路のいずれであるかを精度よく判断することができる情報処理装置を提供する。
【解決手段】 ナビゲーション1は、GPS受信機2から送信されるGPS情報に基づいて、自車両の位置を取得する。また、車車間通信装置4を介して、他車両位置情報および他車両位置情報を取得した際のGPS受信強度信号を取得する。さらに、取得した他車両位置情報およびGPS受信強度信号に基づいて、他車両が高架道路を走行しているか高架下道路を走行しているかの他車両三次元位置を取得する。こうして取得した自車両位置および他社量産時原位置に基づいて、自車両と他車両との衝突可能性を判断する。
(もっと読む)
衛星測位システム(SPS)信号の測定処理用の方法および装置
【課題】多様な種類の入手可能なデータを活用し、最適場所解を得る。
【解決手段】対応する複数のSPS衛星からのSPS信号が、SPS受信機で受信される。SPS受信機の場所に対応する信号環境が特徴付けられ、信号環境データが生成される。例えば、GPS受信機の近似場所を考慮して、セルラーネットワークベースのデータベース等の情報源が探索され、信号環境データを検索する。この近似場所は、GPS受信機と同じ場所に配置されるセルラー通信装置とセルラー無線通信しているセルサイトの場所によって指定されてよい。衛星信号の信号特徴に関連するパラメータが定義され、パラメータの閾値は信号環境データを用いて求められる。複数の衛星からの衛星信号の到着時刻に対応するコードフェーズが測定される。測定されたデータが、GPS受信機の位置が計算される到着時刻の集合を生成するためにパラメータの閾値を使用して調べられる。
(もっと読む)
無線位置決定精度を改善するための方法及び装置
【課題】利用可能な測定値を使用して端末に対するより正確な所在地推定値を行う、無線位置決定精度を改善するための方法及び装置を提供する。
【解決手段】端末110に対する初期の所在地推定値が、(例えば、セルID解又は拡張セルID解に基づいて)初めに取得される。測定値は、端末に対して取得される。初期の所在地推定値は、それから、測定値を用いて更新されて、端末に対する修正された所在地推定値を取得する。更新することは、下記によって実行されることができる、(1)初期の所在地推定値及び測定値に基づいて測定値ベクトルを決定すること、(2)測定値に対する観測行列を作成すること、(3)加重の行列を決定すること、(4)測定値ベクトル、観測行列、及び加重行列に基づいて補正ベクトルを導き出すこと、及び(5)補正ベクトルを用いて初期の所在地推定値を更新すること。
(もっと読む)
マルチパス検出方法、マルチパス検出プログラム、マルチパス検出装置、およびGNSS受信装置
【課題】直接波信号とマルチパス波信号とのコード位相差が小さくても確実にマルチパスを検出する。
【解決手段】マルチパス検出部54のPe相関部31には、Promptレプリカ信号に対して、1chip遅延の第1レプリカ信号と(1+x)chip遅延の第2レプリカ信号が与えられる。Pe相関部31は、ベースバンド信号と第1レプリカ信号および第2レプリカ信号との相関処理を行い、ベースバンド信号と第1レプリカ信号との相関結果から、ベースバンド信号と第2レプリカ信号との相関結果を差分演算する。この差分演算結果は、直接波信号のみであれば理論的に零となり、マルチパス波信号が含まれると零でない所定値となる。したがって、マルチパス判定部32は、零でない閾値Thを設定し、差分演算結果と閾値Thを比較することでマルチパスの有無の判定を行う。
(もっと読む)
測位支援装置
【課題】本発明は、測位支援装置に関し、測位の精度を高めることを目的とする。
【解決手段】衛星航法に基づく測位に供される複数pの航行衛星毎に、前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
(もっと読む)
無線信号観測による位置推定
【課題】電子機器の位置を推定するための方法および装置を提供する。
【解決手段】方法は、推定されるべき位置において機器によって検出される少なくとも1台の無線送信機の識別情報を含む観測を受信するステップと、観測をレコードの集合の内容と比較するステップと、観測とレコードとの間の個々の第1および第2の適合を検出するステップと、対応する位置を検索するステップとを含む。方法は、第1の適合および第2の適合の品質特性と、個々のレコードの供給源の指標とにより、第1の位置推定値および第2の位置推定値の少なくとも1つに基づいて電子機器の位置を推定するステップを含む。
(もっと読む)
測位システムにおける連続データ最適化
【課題】WiFi測位システムでデータを継続的に最適化する、連続データ最適化法を提供する。
【解決手段】WiFiアクセスポイントが移動した、あるいは新規であるかどうかを推定するためにデータが監視される。このように、データは継続的に最適化される。同様に、このようなシステムを使用してWiFi使用可能装置の位置を判定する際に、疑わしいデータを回避することができる。
(もっと読む)
相対位置同定装置
【課題】特別な補助情報装置を追加することなく衛星測位の不正確さを補うことができる相対位置同定装置を提供する。
【解決手段】他車両からの通信により、他車両が測位した位置情報を取得する車車間通信機2と、自車両が測位した位置情報と他車両の位置情報により自車両に対する他車両の方位を同定する測位由来方位同定部3と、前記他車両からの通信電波の到来方位を検出する電波方位検出手段4と、前記他車両からの通信電波の到来方位に基づいて自車両に対する前記他車両の方位を同定する電波由来方位同定部5とを備える。
(もっと読む)
監視システム、及び監視プログラム
【課題】監視対象に設置し、監視対象が移動して変位する場合に始動し、監視対象近辺の画像を指定メールアドレスへ自動送信するとともに監視対象近辺へ威嚇音やメッセージを発する、監視システムを提供する。
【解決手段】監視対象側に位置し、入力手段と送受信手段と加速度測定手段と撮影手段と記憶手段を含んで構成され、利用者側の操作端末からのコマンドにより遠隔操作が可能な通信端末を、操作コマンドを解析するモード解析手段221と、加速度測定手段のセンサ情報をもとに位置情報を算出し、閾値を超えたことを報知する加速度解析手段223と、操作端末から画像取り込みコマンドが入力するときあるいは加速度解析手段が閾値を超えていることを知らせるときに撮影画像を画像処理する画像処理手段224と、加速度解析値が閾値を超えた場合、規定フォーマットの画像を撮影し、データ通信による通知と撮影データを指定の電子メールアドレスに自動送信する。
(もっと読む)
位置算出方法及び電子機器
【課題】位置算出用モジュールを搭載した電子機器における位置算出主体の適正化。
【解決手段】GPS処理部10と、GPS処理部10よりも演算処理能力の高いホスト処理部30とを備えた携帯型電話機1において、GPSアンテナ5は、GPS衛星から送出されるGPS衛星信号を受信する。GPS処理部10は、GPSアンテナ5が受信した信号に対する衛星サーチを行い、位置算出の基礎情報とするメジャメント情報を算出する。そして、ホスト処理部30は、GPS処理部10がメジャメント情報に基づいて位置算出するセルフモードと、ホスト処理部30がメジャメント情報に基づいて位置算出するホストモードとを、記憶部100に記憶されたモード切替条件テーブル103に従って切り替える。
(もっと読む)
メッセージデータ受信方法、メッセージデータ受信プログラム、メッセージデータ受信装置、GNSS信号受信方法、GNSS信号受信プログラム、GNSS信号受信装置、および移動端末
【課題】正しいメッセージデータを状況に応じて早く取得し、更新できるメッセージ受信方法を実現する。
【解決手段】GPS信号を復調し(S101)、IODEによるエフェメリスの更新の有無を確認する(S102)。GPS信号の相関結果に基づいて信頼性パラメータを算出する(S103)。今回の信頼性パラメータの値が既に記憶しているエフェメリスに対応する既存の信頼性パラメータの値よりも高く、且つ今回のエフェメリスと既に記憶しているエフェメリスとが異なれば、エフェメリスの更新指示が無くても、既存のから今回のエフェメリスへ更新記憶する(S104,S105:Yes,S106,S107:Yes,S108)。
(もっと読む)
位置推定プログラム、位置推定装置、及び位置推定方法
【課題】測定誤差情報を有効に利用して、測位対象の位置をより精度よく推定する位置推定プログラムを提供する。
【解決手段】位置推定プログラムは、複数の送信機からの信号を受信して行った測位により得られる位置と該位置の測定誤差とにより表される楕円形状の誤差領域を示す誤差領域情報を出力する測位部を用いて、複数回測位を行って得られた複数の前記誤差領域情報を取得し、前記取得した各誤差領域情報により示される前記誤差領域を長軸方向へ延長し、前記延長した誤差領域同士が交差する交差領域に基づいて測定対象の位置を推定する処理をコンピュータに実行させることにより、上記課題の解決を図る。
(もっと読む)
携帯端末の測位方法
【課題】固定した場所に設置されたICタグを読み取ることにより、端末の位置を知るという方法では、位置精度が低下する。
【解決手段】携帯端末本体にもICタグを設置して、携帯端末同士の位置関係を取得できるようにする。固定したICタグとの位置関係に加えて、移動する携帯端末同士の位置関係を考慮して分析することにより、携帯端末の位置をより高い精度で特定する。また、携帯端末における「通話中」「画面操作中」「待ち受け中」「マナーモード」「圏外」などの状態を考慮して測位精度を高める。
(もっと読む)
電離層遅延評価装置および航法装置
【課題】本発明は、衛星航法系において、誤差の要因となる電離層遅延を求める電離層遅延評価装置と、その電離層遅延評価装置またはこれに代わる装置との連係に必要なインタフェースの機能を有する航法装置とに関し、ハードウェアの規模が大幅に増加することなく、電離層遅延の補正を精度よく安定に実現できることを目的とする。
【解決手段】航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段とを備える。
(もっと読む)
無線端末機の位置測定方法
【課題】無線端末機の移動性の度合によって測位周期を適応的に調整する。無線端末機の位置測定方法を提供する。
【解決手段】ジャイロスコープセンサーを備え、GPSから位置情報を受信し、予め定められた第1基準加速度と前記移動加速度とを比較し、該比較結果に基づいて前記端末機の測位周期を更新するか、または、前記GPSまたはネットワークサーバーを用いて前記端末機の位置を更新する段階と等、を含む。
(もっと読む)
測位装置、及び測位方法
【課題】様々な場所でできるだけ正確な位置を測位できるようにする。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
(もっと読む)
衛星信号捕捉適否判定方法及び衛星信号捕捉適否判定装置
【課題】衛星信号の捕捉適否を判定するための新たな手法の提案。
【解決手段】GPS衛星からのGPS衛星信号の捕捉を試行して復号した復号衛星軌道データ(第1の衛星軌道データ)と、当該GPS衛星について取得済みの照合用衛星軌道データ(第2の衛星軌道データ)とを用いて、GPS衛星信号の捕捉適否を判定する。具体的には、復号衛星軌道データと照合用衛星軌道データとが所定の近似条件を満たすか否かを判定し、近似条件を満たす場合には、GPS衛星信号の捕捉が適切に行われたと判定する。
(もっと読む)
マルチパス信号判定方法、信号適否判定方法及びマルチパス信号判定回路
【課題】 演算量を増加させたり、回路規模を増大させることなく、マルチパス信号の判定を適切に行うこと。
【解決手段】相関演算を行った各サンプリング位相の相関値それぞれをIQ座標上に順次プロットした場合に、それらのプロット位置が閉曲線状に配列されているか否か、或いは直線状に配列されていないか否かを検出するといった簡単な方法で、受信信号がマルチパス信号であるか否かを判定する。更に、配列された閉曲線の広さに基づいて、測位に使用可能か否かを判定する。
(もっと読む)
測位精度判定装置
【課題】GPS測位の位置誤差の大小が判定できる測位精度判定装置を提供する。
【解決手段】速度センサ2による速度センサ由来速度と衛星測位速度演算部6による衛星測位速度とドップラー速度演算部7によるドップラー速度と加速度センサ由来速度演算部8による加速度センサ由来速度についてそれぞれ移動距離を演算する移動距離演算部9と、衛星測位速度から得た移動距離と他の移動距離とのの差を演算し、差が閾値より大のとき、GPS測位精度が低下していると判定する精度判定部10とを備える。
(もっと読む)
81 - 100 / 675
[ Back to top ]