
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
161 - 180 / 675
移動通信端末及び測位方式選択方法
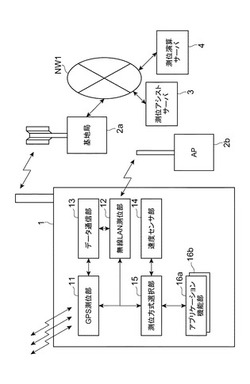
【課題】端末の移動速度が様々変化する場合であってもそれに応じて測位誤差を低減すること。
【解決手段】この移動通信端末1は、複数の測位演算方式によって測位演算が可能に構成された端末であって、移動通信端末1の移動速度を検出する速度センサ部14と、GPS測位方式による測位演算を処理するGPS測位部11と、GPS測位方式よりも演算時間の短い無線LAN測位方式による測位演算を処理する無線LAN測位部12と、速度センサ部14によって検出された速度が所定の基準によって高速であると判断される場合には、無線LAN測位部12に対して測位演算を要求し、速度が所定の基準によって低速であると判断される場合には、GPS測位部11に対して測位演算を要求する測位方式選択部15とを備える。
(もっと読む)
先行車位置判定装置

【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
受信装置
【課題】衛星から受信した信号の精度を早期に推定する技術を提供する。
【解決手段】アンテナ10は、少なくともひとつの衛星から送信された信号を受信する。周波数弁別部28は、受信した信号において発生しうるドップラーシフトの範囲にわたって周波数が変化するローカル信号を発生する。周波数弁別部28は、ローカル信号によって、受信した信号を周波数変換する。周波数弁別部28は、周波数変換した信号をエンベロープ検波する。周波数弁別部28は、エンベロープ検波した信号をしきい値と比較する。CPU20は、比較の結果、しきい値以上の値になっている信号成分の数を計数することによって、受信した信号の送信元になる衛星の数を推定する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】慣性航法を利用した位置算出の正確性を向上させるための新たな手法を提案すること。
【解決手段】自動車に設置されたジャイロセンサーの検出結果を用いて、移動体である自動車の姿勢及び移動方向が検出される。そして、検出された姿勢に基づいて、自動車に設置された加速度センサーの検出結果が、相対座標系から絶対座標系に座標変換され、座標変換後の検出結果を用いて、速度ベクトルが算出・更新される。そして、算出された速度ベクトルが検出された移動方向を用いて補正され、補正された速度ベクトルを用いて、自動車の位置が算出・更新される。
(もっと読む)
位置推定装置及び位置推定方法
【課題】高い精度で移動局の位置を推定する。
【解決手段】位置推定装置300は、予め位置が特定されている複数の基地局201〜204と位置推定対象である複数の移動局101,102との一方向又は双方向通信により取得した所定の信号に基づき移動局の位置を推定する位置推定部340と、位置推定部340により推定された移動局の位置を用いて該位置を推定された移動局と前記複数の基地局との距離に含まれるバイアス量を推定するバイアス量推定部350と、位置推定部により推定された移動局の位置と、前記バイアス量分布取得部により取得されたバイアス量分布の該移動局の位置に対応するバイアス量から移動局の位置の推定のための初期値を求めるバイアス量推定部350と有する。位置推定部340は、バイアス量分布取得部370により取得されたバイアス量分布を移動局の位置の推定のために使用する。
(もっと読む)
可搬型携帯端末及び方位推定プログラム
【課題】高精度な方位推定を実現する。
【解決手段】水平分力期待値推定部40が、可搬型携帯端末100の位置情報(Pos)に対応する、地磁気の水平分力の大きさの期待値(Mag_Hor_Ex)を取得し、選択部50は、地磁気センサ14において検出された地磁気の水平分力の大きさ(Mag_Hor)が、期待値から所定範囲内にあるか否かを判定し、その判定の結果、検出された水平分力の大きさが、所定範囲内にあると判定された場合に、地磁気センサ14の検出結果を用いた推定方位(Dir_Mag)を出力する。
(もっと読む)
自車位置認識システム
【課題】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する際に、その推定自車位置の誤差範囲をできるだけ正確に算定できる技術の提供。
【解決手段】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する自車位置算定部と、推定自車位置を基準として推定自車位置の存在可能範囲を基本誤差範囲として算定する誤差範囲算定部とを備えた自車位置認識システム。車両走行方向を基準方向として当該基準方向に対する誤差の発生方向に偏りを有する方向性誤差要因の1つ又は2つ以上について、誤差の発生量の推定値である推定誤差量を算出する推定誤差量演算部と、方向性誤差要因毎の誤差の発生方向及び推定誤差量に基づいて、前記基本誤差範囲を修正する誤差範囲修正部とを備えている。
(もっと読む)
位置推定装置、位置推定方法及びプログラム
【課題】高い精度で移動局の位置を推定する。
【解決手段】位置が既知である複数の基地局20と位置推定対象である移動局10との一方向又は双方向通信により取得した所定の信号に基づき、複数の基地局20と移動局10との観測距離を計測する距離計測部32と、距離計測部32により計測された複数の基地局20の観測距離に基づき、予め定められた移動局の推定初期位置40の方向に各基地局20の観測座標を決定する観測座標決定部34と、観測座標決定部34により決定された複数の基地局20の観測座標から移動局10の代表位置を移動局10の推定位置50として算出する推定位置算出部36と、を有する位置推定装置を提供する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減しつつ、測位率を向上させる。
【解決手段】GNSS受信装置は、相関ピークを検出する第1相関ピーク検出部と、マルチパス誤差低減技術により相関ピークを検出する第2相関ピーク検出部と、測位信号強度を検出する信号強度検出部と、測位信号を第1又は第2相関ピーク検出部に入力する切り替え部と、信号強度が閾値以上の場合に測位信号を第2相関ピーク検出部に入力し、閾値未満の場合に第1相関ピーク検出部に入力する指示を行う信号強度判定部と、マルチパスの影響下にあるかを判定するマルチパス判定部と、マルチパス誤差低減技術により相関ピークを検出することが所定の時間継続できない場合、測位信号を第1相関ピーク検出部に入力する指示を行うタイミング制御部と、相関ピークに基づいて、擬似距離を算出し、位置を算出する測位演算部とを有する。
(もっと読む)
路側通信機及び位置精度推定方法
【課題】車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できるようにする。
【解決手段】地上からGPS衛星までの距離は路側通信機と車載通信機との距離に比べて非常に長いため、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、車載通信機3と路側通信機2とは同じ条件であると解される。そこで、GPS衛星S1〜S5から送信される信号を路側通信機2が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、車載通信機3のアップリンク信号に含まれる位置情報の精度を推定する。
(もっと読む)
位置推定装置及びプログラム
【課題】精度よく移動体の位置を推定する。
【解決手段】車両に搭載される位置推定装置であって、GPS情報取得部20で、複数のGPS衛星の各々から発信された、各々のGPS衛星の軌道情報、GPS擬似距離データ、及びドップラー周波数情報を含むGPS情報を取得し、軌跡推定部40で、取得されたGPS情報に基づいて自車両の速度ベクトルを算出し、算出した速度ベクトルを所定時間分積算して自車両の軌跡を算出する。また、取得したGPS擬似距離データ及びGPS衛星の軌道情報から取得されるGPS衛星の位置座標を擬似距離・衛星位置記憶部に記憶しておく。そして、最適化位置推定部60で、自車両の軌跡上のエポック毎の各GPS衛星との距離と、そのエポックにおける擬似距離との擬似距離差分の全GPS衛星の全エポック数分の和が最小となるように自車両の軌跡を平行移動させて移動体の位置を推定する。
(もっと読む)
無線通信機
【課題】 低コストで、位置情報の信頼性の向上に寄与する。
【解決手段】 位置情報検証部11は、自局及び他局の精度情報に基づいて、距離換算精度を求め、この距離換算精度を通信方式による最大通信距離に加算し、さらに安全のための所定のマージンを加算して、最大通信可能距離を算出し、自局位置情報及び他局位置情報に基づいて、自局他局間距離を算出し、自局他局間距離が最大通信可能距離を越えるか否か判定し、越える場合は、位置情報異常と判定する。
(もっと読む)
オブジェクトの絶対配置パラメータの決定方法、そのコンピュータプログラムおよび制御設備
【課題】センサによって供給される相対位置パラメータに基づいて、オブジェクトの絶対位置を決定する。
【解決手段】オブジェクトの集合のうちの2つのオブジェクト間の相対配置パラメータをそれぞれ取得するステップ(210;210*)と、受信したそれぞれの相対配置パラメータに相対配置パラメータの信頼性と呼ぶ値を関連付けるステップ(211;211*)と、相対配置パラメータの信頼性に応じて、作業用部分集合を選択するステップ(214;214*)と、作業用部分集合に属するオブジェクトと作業用部分集合外のオブジェクトとの間の新たな相対配置パラメータをそれぞれ決定するステップ(230;230*)と、決定した新たな相対配置パラメータのそれぞれに、作業用部分集合のオブジェクトの相対配置パラメータの信頼性に基づいて計算した信頼性を関連付けるステップ(232;232*)のループ(212;212*)を少なくとも1回実施する。
(もっと読む)
位置検知プログラム、位置検知装置および位置検知方法
【課題】測位誤差によって位置情報の誤測位が発生しても、誤った位置情報に影響されずに正確に移動経路ごとに作業対象となった作業地を検知すること。
【解決手段】位置検知装置100は、連続した位置情報Pを複数個ごとにグループ化し、同一のグループに含まれる位置情報Pが示す作業地の多数派を真の作業地として採用する。そこで、位置検知装置100は、移動経路を誤差幅よりも十分に長くなる距離ごとに分割し(S11)、分割した移動経路に含まれる位置情報Pから作業地候補を特定する(S12)。したがって、グループ1では、位置情報P1〜P6が示す圃場A,Bが、グループBでは、位置情報P7〜P11が示す圃場Aがそれぞれ作業地候補となるため、位置検知装置100は、S12によって特定された作業地候補の中から、多数派となる作業地を作業中の作業地に決定する(S13)。
(もっと読む)
衛星航法システムにおける測位誤差の補正方法及びその装置。
【課題】 1周波型GPS受信機の測位誤差を小さくする。
【解決手段】 航法衛星からの測位信号のクロック及び航法衛星の軌道、電離層による伝搬遅延の補正情報を求めて、ユーザ局へ送信するマスタ局と、既知点に設置された複数のモニタ局と、マスタ局と複数のモニタ局を結ぶネットワークとからなる衛星航法システムにおいて、マスタ局は、モニタ局で受信された2周波の測位データから電離層遅延量を計算し、この電離層遅延量から、1周波型GPS受信機で利用可能な電離層遅延量の補正情報であって、経緯度5度毎に作成されたグリッド点毎の情報であるグリッド情報を作成し、このグリッド情報から、クロックの補正情報と軌道の補正情報を計算して、グリッド情報と共にこれらの補正情報をユーザ局へ送信し、ユーザ局は、これらの補正情報を用いて航法衛星からの測位信号の補正を行い、自局の測位を行う。
(もっと読む)
車両位置演算装置
【課題】 一般に電子基準点から移動体までの距離が長くなるに従い測位性能が低下する。移動体が電子基準点をまたぐような広い範囲を計測対象として計測する場合であっても、測位結果の段差表示を少なくして、より精度の高い計測結果を表示する位置計測装置を提供する。
【解決手段】 予め定められたヒステリシス値を記憶する記憶部を備える。車両位置演算装置は、移動体の単独測位位置から複数の基準局の中で予め指定された指定基準局までの距離と、単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離との中から、最も近い距離にある基準局を抽出し、当該基準局を指定基準局に設定し、この指定基準局が有する補正情報とGPS衛星からの観測データとに基づき前記移動体の走行位置を算出する。
(もっと読む)
位置推定システム及び位置推定方法
【課題】
従来の被測位対象の位置を推定するシステムでは、被測位対象と測位に利用する電波送受信機との間に電波伝送の障害物が存在した場合、無線端末との通信により電波当該障害物による電波伝搬環境変化の検出を行っていた。よって、無線特性パラメータが変化の検出精度が低くならざるを得なく、結果として、無線端末の位置の算出精度が低くなってしまっていた。
【解決手段】
本発明は、電波送受信機の間に電波伝送の障害物が存在する場合に、無線発受信部と無線端末との間の無線特性パラメータからではなく、無線発受信部間の無線信号通信により、電波伝搬環境の変化検出効果を高め、結果として、高精度の位置の推定を可能とする。
(もっと読む)
衛星測位システムの異常値検出装置、異常値検出方法及び異常値検出プログラム
【課題】観測環境に変化が生じたり、各データ間に時系列的な相関関係がある場合であっても、精度良く衛星測位システムの異常値を検出する。
【解決手段】異常値指標算出部11は、衛星測位システムの各人工衛星と受信機との間の擬似距離などの時系列データの各時刻における異常値指標を算出する。動的モデル構成部12は、一定期間において異常値指標から動的にモデルを構成し、その動的モデルに基づいて、時系列の異常値指標から変化点指標を算出する。変化点指標は、突発的に増減した時系列値が存在する場合、その時系列値が単発的な動的モデルからの外れ値であるのか、それとも入力データの動的モデル自体が変化しているのかを判断する指標である。異常値検出部13は、変化点指標を予め設定した閾値と比較し、変化点指標の値が閾値よりも大きければ、その時刻の変化点指標に対応する異常値指標を異常値として検出する。
(もっと読む)
偽信号相互相関検出方法
【課題】誤って偽信号相互相関の起こり得ない衛星を衛星選択から除外してしまう、偽信号相互相関による位置とび等の障害を防止又は軽減する。
【解決手段】受信・捕捉している複数の衛星について、ドップラー周波数測定値同士の差(受信周波数差)が所定範囲内か否かの判別を行い(S201)、所定範囲内とされた衛星組合せの受信レベル差である所定値以上か否かを調べる(S205、S206)。それらの条件が成立した場合は、受信レベルの低い衛星は偽信号相互相関による偽像と見なし、以後測位計算の対象から除外する(S208)。
(もっと読む)
伝搬経路推定システム及び伝搬経路推定方法
【課題】衛星から送信された電波が地表で反射され、当該反射波を衛星で受信するリモートセンシングの場合や、地上の送信源から送信された電波を衛星で受信して送信源の位置を推定するような場合に、電離層が与える影響を排して正確な伝搬経路を推定する伝搬経路推定システム及び伝搬経路推定方法を提供する。
【解決手段】複数の測位衛星10から送信される衛星信号を受信する1以上の受信機24を有する伝搬経路推定システムであって、衛星50に設けられ、地上から到来して電離層を通過した電波を受信するアレイアンテナ52と、電波の到来方位と仰角とを算出する信号処理装置59と、受信情報として衛星通信により地上に送信する通信データ処理装置60と、受信情報に基づいて、衛星50の位置等を算出する第2算出部と、電波の伝搬経路に対応する領域の電子密度を推定する第2電子密度推定部と、レイトレーシング手法によりアレイアンテナが受信した電波の伝搬経路を推定する伝搬経路推定部とを備える。
(もっと読む)
161 - 180 / 675
[ Back to top ]