
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
1 - 20 / 675
位置標定システム、移動端末、及び位置標定システムの制御方法
位置情報処理装置および位置情報処理方法
位置標定方法、及び位置標定システム
測位装置及びプログラム
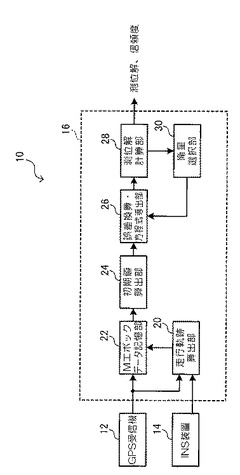
【課題】GPS情報とINS情報とを統合して測位する場合に、測位解の信頼度を精度良く計算する。
【解決手段】走行軌跡算出部20で、Mエポック分のGPS情報及びINS情報に基づいて自車両の走行軌跡を算出し、初期値算出部24で、算出した走行軌跡に基づいて、Mエポック分の自車両の位置の初期値を算出する。誤差換算・方程式導出部26で、バンドルアジャストメント方式により、初期値に基づくGPS情報の観測方程式を導出すると共に、INS誤差を、各エポックにおける自車両から見たGPS衛星の方向に投影して擬似距離誤差に換算して、GPS誤差と統合する。測位解計算部28で、観測方程式から測位解を計算すると共に、統合された観測誤差に基づいて信頼度を計算する。
(もっと読む)
位置標定装置、車載器、位置標定方法、位置標定プログラム、運転支援方法、運転支援プログラム、道路課金方法、道路課金プログラム、位置標定システム、運転支援システムおよび道路課金システム

【課題】車両間で相対DGPSを行わなくても車両間の相対位置が得られるようにすることを目的とする。
【解決手段】測位信号受信部112は測位衛星102から測位信号を受信して観測量を算出する。自己位置標定部114は観測量を用いて概略位置の座標値を算出する。LEX信号受信部111は準天頂衛星からLEX信号を受信して地域別の測位補強情報を取得する。デコード部113は概略位置を含んだ地域の測位補強情報を選択して観測量の補正量を算出する。自己位置標定部114は観測量を補正し、補正した観測量を用いて標定座標値を算出する。V2V通信制御部115は標定座標値を他の車両103へ送信し、他の車両103の標定座標値を受信する。相対位置演算部116は自己の車両103と他の車両103の標定座標値に基づいて他の車両103の相対位置を算出し、算出した相対位置を運転制御支援装置104に出力する。
(もっと読む)
移動体装置、情報処理装置、位置情報取得方法、位置情報取得システム、及びプログラム
【課題】位置情報の改竄の可能性を低減し、位置情報の信頼性を高める。
【解決手段】移動体装置は、接近する移動体装置から第1の識別情報を取得する識別情報取得部と、上記第1の識別情報を取得した時点における現在地点の位置情報を取得する位置情報取得部と、上記第1の識別情報及び上記位置情報を対応づけて外部装置に送信する送信部と、を有する。
(もっと読む)
日常圏設定システム、日常圏設定方法及び日常圏設定プログラム
【課題】ユーザの日常圏を自動的に設定することができる日常圏設定装置を提供する。
【解決手段】日常圏設定システムは、携帯端末から送信される当該携帯端末の現在位置を測位した測位点と測位時刻とを対応付けて所定のデータベースに格納する格納手段と、前記測位点と前記測位時刻を前記測位点が属するメッシュ領域に対応付けた基礎データを生成する基礎データ生成手段と、前記基礎データに基づいて、各メッシュ領域における所定期間内の前記測位点の測位回数及び/又は前記携帯端末のユーザの滞在時間を算出し、当該各メッシュ領域と当該算出した測位回数及び/又は滞在時間とを対応付けたメッシュデータを生成するメッシュデータ生成手段と、前記メッシュデータに含まれる測位回数及び/又は滞在時間が所定の閾値以上であるメッシュ領域を、前記ユーザの日常圏として設定する日常圏設定手段とを備える。
(もっと読む)
RTK測位計算に利用する衛星の選択方法及びその装置
【課題】 RTK測位におけるリアルタイムの測位に使用出来るとともに、1日に高精度位置を利用出来る合計時間(利用率)の向上を図ること
【解決手段】 仰角マスク又は信号強度マスクの何れか一方のマスク閾値について初期設定したマスク閾値とは異なる別のマスク閾値を設定し、初期設定したマスク閾値を介して選択した衛星からの信号に基づいてRTK測位計算を行い、この測位解の品質チェックを行い、判定結果が良い場合にはこの測位解を高精度測位解とし、判定結果が悪い場合には別のマスク閾値を設定したマスク閾値を初期値から別のマスク閾値に変更し、この別のマスク閾値を介して新たに選択した衛星からの信号に基づいてRTK測位計算を行い、この測位解の品質チェックを行い、判定結果が良い場合にはこの測位解を高精度測位解とする。品質チェックは、Ratioテストにより行い、利用可能な衛星信号として、GPSに加えてGLONASSからの信号を自動的に選択可能とする。
(もっと読む)
位置情報検出装置および位置情報検出方法
【課題】マルチパスの影響を受けていないGPS衛星の情報を用いて正確に測位演算を行うことができる位置情報検出装置および位置情報検出方法を提供する。
【解決手段】方法は、マルチパスの影響を受けていないGPS衛星の情報を用いて正確に測位演算を行うことを目的として、道路の線形を示す道路線形情報に基づいて、道路上の現在位置から当該道路の延在方向に存在するGPS衛星を選択し、選択したGPS衛星から送信されるGPS信号に基づいて、位置情報検出装置の位置情報を検出する。
(もっと読む)
ナビゲーション装置
【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
(もっと読む)
移動情報判定装置、受信機、及びそれについての方法
【課題】移動情報を判定するための移動情報判定装置、及び方法を提供する。
【解決手段】移動情報判定装置は、地球中心補助物(ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。高度情報及び位置情報保存モジュールは、移動情報判定装置の初期位置情報及び移動情報判定装置の高度情報を提供する。ECA獲得モジュールは、移動情報判定装置の現在位置における地球の半径を獲得する。移動情報計算モジュールは、地球の半径及び複数の衛星が提供する複数の信号に基づいて、移動情報判定装置の現在位置及び/または速度を計算する。
(もっと読む)
位置の確認
【課題】測位の計算量および電力消費を最小化しつつ、最も可能性が高い候補(または複数の候補)を迅速に選択することができる電子デバイスの位置の指標を決定する方法を提供する。
【解決手段】デバイスによって、衛星測位システムの1つまたは複数の衛星から送信された無線信号を受信し、無線信号に関する情報を得る。この情報から、信号が受信された時のデバイスの真の位置に関して、複数の仮定を得る。無線信号に関する情報と仮定との間の一致度を評価して、評価の結果に基づき、仮定のうちの1つまたは複数を選択する。選択された1つまたは複数の仮定の指標を出力する。
(もっと読む)
測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システム
【課題】取得した軌跡から軌跡が位置する場所の状態を識別することができること。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】GPSの電波受信がなされていない状況下での移動経路の補正を適正に行う。
【解決手段】測位装置100であって、GPSアンテナ2aによる信号の受信の再開後、GPS処理部2により測定された測位再開地点の位置に基づいて、自律航法制御処理部4により測定された移動経路の各地点の位置データを補正する補正処理部6と、測位再開地点の位置データと、GPS測位が再開された時点での自律航法測位された移動経路の第2地点の位置データとの差異量が所定値よりも大きいか否かを判定する判定部c1と、当該差異量が所定値よりも大きいと判定された場合に、移動経路の第1地点から第2地点までの経路長に対する移動経路の各地点までの経路長に基づいて、移動経路の各地点の位置データを補正させる第1補正処理を実行させる補正制御部6cとを備えている。
(もっと読む)
測位正確度算出方法及びその装置並びにこれを用いた端末の測位方法及びその装置
【課題】複数の測位技術のうち現在の位置で最上の測位正確度を有する測位技術を選択して端末の位置を測定することのできる測位正確度算出方法及びその装置並びにこれを用いた端末の測位方法及びその装置を提供する。
【解決手段】測位正確度算出方法は、測位正確度算出方法において、端末で用いられる測位技術に対応するマップを提供するステップと、前記マップから前記端末の位置を含む特定領域に対するマップ情報を読み出すステップと、前記特定領域に対するマップ情報に基づいて前記測位技術による測位正確度を算出するステップとを有する。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定する。
【解決手段】自装置の位置を推定する位置推定部と、ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値Rcを、前記ビーコン位置Pbの重みとして、前記位置推定部が推定した推定位置Pcと前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置Pとして特定する位置特定部とを備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性を向上させるための新しい手法の提案。
【解決手段】GPS衛星からGPS衛星信号を受信する。そして、受信した信号の電波状態を示す指標値を確率変数として受信環境(オープンスカイ環境、インドア環境及びマルチパス環境等)別に定められた確率分布モデルに基づいて、受信環境別の確からしさを算出する。そして、受信環境別の確からしさを用いて位置算出方法を決定し、決定した位置算出方法に従って位置を算出する。
(もっと読む)
GPS装置を位置決めするシステムおよび方法
【課題】GPS装置の正しい位置を、予め定められた選択すべき位置のセットから決定するシステムと方法を提供する。
【解決手段】目視可能なGPS衛星1および予め定められた代替え位置の既知位置に基づいて、各衛星と各位置との間の理論的距離および/またはその距離の差を決定する。これらの距離は、予め定められた代替え位置のなかから正しい位置を選択するための、GPS装置5のアンテナ3と各GPS衛星の間の距離6の測定値に関連がある。貨物置場における予め定められたコンテナスロットを識別するシステムおよび方法も開示される。
(もっと読む)
測位装置、観測装置、測位方法およびプログラム
【課題】精度よく位置を取得する技術を提供する。
【解決手段】デジタルカメラ1に搭載される測位部2に、取得時におけるデジタルカメラの位置を示す第1位置情報221を取得する位置取得部25と、デジタルカメラの移動ベクトルに関する移動情報224を取得する移動検出部26と、位置取得部25により取得された第1位置情報221の精度を評価する評価部204と、評価部204による評価結果に応じて、位置取得部25により取得された第1位置情報221と移動検出部26により取得された移動情報224とに基づいて、デジタルカメラの位置を示す第2位置情報227を生成する位置情報生成部203とを設ける。
(もっと読む)
測位システム、測位端末装置および測位方法
【課題】測位端末装置が取得した測位データをその都度測位サーバに転送せず、測位サーバが所定のタイミングで転送される測位データに基づいて測位端末装置の測位を精度よく行う。
【課題手段】1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
(もっと読む)
1 - 20 / 675
[ Back to top ]