
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
1 - 20 / 139
測位装置、測位方法及びプログラム
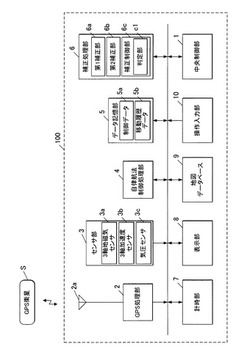
【課題】GPSの電波受信がなされていない状況下での移動経路の補正を適正に行う。
【解決手段】測位装置100であって、GPSアンテナ2aによる信号の受信の再開後、GPS処理部2により測定された測位再開地点の位置に基づいて、自律航法制御処理部4により測定された移動経路の各地点の位置データを補正する補正処理部6と、測位再開地点の位置データと、GPS測位が再開された時点での自律航法測位された移動経路の第2地点の位置データとの差異量が所定値よりも大きいか否かを判定する判定部c1と、当該差異量が所定値よりも大きいと判定された場合に、移動経路の第1地点から第2地点までの経路長に対する移動経路の各地点までの経路長に基づいて、移動経路の各地点の位置データを補正させる第1補正処理を実行させる補正制御部6cとを備えている。
(もっと読む)
方位情報取得方法

【課題】GPS衛星より送信される信号によりGPS受信機により方位情報を取得する方法に関して装置の使用文脈に適した廉価で効率的な方法で回折波の影響を弱化して正確な情報を得ることを可能にする。
【解決手段】体躯を用いて上空半天球の片側に存在するGPS衛星からの衛星信号の遮蔽を行うと同時に、体躯に沿い大地に垂直に設置されたGPS受信機に
他方の片側に存在するGPS衛星の衛星信号の探索を行わせつつ、捕捉した衛星信号を用いて方位を限定的に得る過程において、遮蔽物としての体躯の両脇からの回折波については、中空構造の容器中に充填された水又はそれに近い誘電損係数を備える物質を、前記GPS受信機の周囲に配備することで、廉価なGPS受信機を流用しているため影響を与えようとする回折波の弱化を効率的かつ必然性を有して所持している物質の有効活用を図りつつ実現し、GPS受信機が回折波の影響を排除し方位限定する事を助ける。
(もっと読む)
方位情報取得方法
【課題】GPS衛星より送信される信号によりGPS受信機により方位情報を取得する方法に関して装置の使用文脈に適した廉価で効率的な方法で回折波の影響を弱化して正確な情報を得ることを可能にする。
【解決手段】体躯を用いて上空半天球の片側に存在するGPS衛星からの衛星信号の遮蔽を行うと同時に、体躯に沿い大地に垂直に設置されたGPS受信機に
他方の片側に存在するGPS衛星の衛星信号の探索を行わせつつ、捕捉した衛星信号を用いて方位を限定的に得る過程において、遮蔽物としての体躯の両脇からの回折波については、中空構造の容器中に充填された水又はそれに近い誘電損係数を備える物質を、前記GPS受信機の周囲に配備することで、廉価なGPS受信機を流用しているため影響を与えようとする回折波の弱化を効率的かつ必然性を有して所持している物質の有効活用を図りつつ実現し、GPS受信機が回折波の影響を排除し方位限定する事を助ける。
(もっと読む)
路面勾配算出装置及び方法
【課題】走行する移動体上でリアルタイムに、かつ、高精度に路面勾配を算出できる路面勾配算出装置及び方法を提供すること。
【解決手段】路面勾配算出装置10は、移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機101と、移動体の略重心位置に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMU102とを備える。そして、路面勾配算出装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した速度の水平方向の速度を積算し、水平方向相対距離を算出し、算出した速度の垂直方向の速度を積算し、垂直方向相対距離を算出し、算出した水平方向相対距離が所定の水平方向距離になる区間ごとに、算出した水平方向相対距離と、算出した垂直方向相対距離とに基づいて、路面勾配を算出する。
(もっと読む)
マルチパス検出方法、マルチパス検出プログラム、マルチパス検出装置、およびGNSS信号受信装置
【課題】より正確にマルチパス遅延量を算出できるマルチパス検出方法を実現する。
【解決手段】受信信号を取得し(S101)、直接波信号と間接波信号との振幅比を含むマルチパス状態を検出する(S102)。三組のEarly相関処理用信号とLate相関処理用信号を用いて、それぞれに第1擬似距離ρ1、第2擬似距離ρ2、第3擬似距離ρ3を算出する(S103)。第1擬似距離ρ1、第2擬似距離ρ2、第3擬似距離ρ3を用いて、第1擬似距離差分値Δρ21と第2擬似距離差分値Δρ31を算出する(S104)。振幅比に基づいて、第1擬似距離差分値Δρ21と第2擬似距離差分値Δρ31を補正し、正規化する(S105)。正規化した第1擬似距離差分値Δρ21と第2擬似距離差分値Δρ31を元に、擬似距離差分値とマルチパス遅延量との関係テーブルから、マルチパス遅延量を決定する(S106)。
(もっと読む)
測位デバイス配置指定装置、測位システム
【課題】測位対象物が障害物のどちら側に存在するかを判定することができるように、測位デバイスの配置を指定する技術を提供する。
【解決手段】本発明に係る測位デバイス配置指定装置は、障害物の両側にともに測位デバイスが配置されるように、配置位置を算出する。
(もっと読む)
異常値判定装置、測位装置、及びプログラム
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
方位測定装置
【課題】高緯度における方位誤差を従来よりも低減する。
【解決手段】慣性センサの検出量に基づいて航走体の第1の方位角を測定するマスタコンパスと、一定間隔を隔てて配置された2つに受信アンテナを備え、各受信アンテナで間欠的に受信した測位用電波に基づいて各受信アンテナの位置を演算し、当該各受信アンテナの位置に基づいて航走体の基準方位角を測定する基準方位角測定手段と、該基準方位角測定手段から間欠的に入力される基準方位角に基づいて当該基準方位角よりも細かい間隔のバックアップ方位角を出力するバックアップ方位角演算部と、緯度が所定の基準緯度を超えない状態では第1の方位角を外部に出力し、緯度が所定の基準緯度を超えた状態ではバックアップ方位角を外部に出力する出力方位角切替部とを具備する。
(もっと読む)
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
(もっと読む)
測位装置及び電子機器
【課題】測位装置が測位に要する時間を外部に通知することにより、測位終了を待っている利用者の心理的な負荷を軽減する衛星測位システムの測位装置を提供する。
【解決手段】測位装置は、衛星から受信した測位信号に基づいて測位を行う測位装置であって、測位信号をサーチする範囲を計算する第一計算手段10と、測位信号をサーチするステップを計算する第二計算手段11と、測位信号を積算する時間を計算する第三計算手段12と、第一計算手段10と第二計算手段11と第三計算手段12と、を使って測位計算が完了するまでの予測所要時間を計算する第四計算手段13と、第四計算手段13で計算される予測所要時間を初期値として時間管理を開始するタイマー手段14と、タイマー手段14で管理される予測所要時間を通知する通知手段15と、を備える。
(もっと読む)
無線位置決定精度を改善するための方法及び装置
【課題】利用可能な測定値を使用して端末に対するより正確な所在地推定値を行う、無線位置決定精度を改善するための方法及び装置を提供する。
【解決手段】端末110に対する初期の所在地推定値が、(例えば、セルID解又は拡張セルID解に基づいて)初めに取得される。測定値は、端末に対して取得される。初期の所在地推定値は、それから、測定値を用いて更新されて、端末に対する修正された所在地推定値を取得する。更新することは、下記によって実行されることができる、(1)初期の所在地推定値及び測定値に基づいて測定値ベクトルを決定すること、(2)測定値に対する観測行列を作成すること、(3)加重の行列を決定すること、(4)測定値ベクトル、観測行列、及び加重行列に基づいて補正ベクトルを導き出すこと、及び(5)補正ベクトルを用いて初期の所在地推定値を更新すること。
(もっと読む)
測位システムにおける連続データ最適化
【課題】WiFi測位システムでデータを継続的に最適化する、連続データ最適化法を提供する。
【解決手段】WiFiアクセスポイントが移動した、あるいは新規であるかどうかを推定するためにデータが監視される。このように、データは継続的に最適化される。同様に、このようなシステムを使用してWiFi使用可能装置の位置を判定する際に、疑わしいデータを回避することができる。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】短期間であっても角速度の導出精度を向上させる技術を提供する。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
無線通信を利用した周辺車両感知システム及びその方法
【課題】周辺車両との衝突を予測できる無線通信を利用した周辺車両感知システム及びその方法を提供する
【解決手段】 本発明に係る無線通信を利用した周辺車両感知システムは、無線信号を発生させる複数個の無線信号発信部と、周辺車両から発生した無線信号を受信する複数個の無線信号受信部と、受信された無線信号の強度に応じて周辺車両との距離を算出する周辺車両距離算出部と、前記複数個の無線信号受信部の間の距離と前記算出された周辺車両との距離を利用し、前記周辺車両の位置を推定する周辺車両位置推定部と、前記周辺車両の位置を利用して前記周辺車両の時間当り移動距離から前記周辺車両の走行速度を推定する周辺車両走行速度推定部と、前記周辺車両の位置を利用して前記周辺車両の走行方向を推定する周辺車両走行方向推定部とを含むことを特徴とする。
(もっと読む)
位置情報処理システム及び方法
【課題】
既製の地図の辞書を不要とし、ユーザ自らが、GPSにより得られる位置情報に対応する場所情報を提供して地図情報の作成に参画する。
【解決手段】
携帯端末は、GPS受信手段により得られた緯度及び経度を含む位置情報と、携帯端末又はそれを使用するユーザに固有のユーザIDと、場所名称とを通信ネットワークを介して管理サーバへ送信し、
管理サーバは、携帯端末から送信され得られた位置情報と、場所名称を第1DBに記憶し、かつ携帯端末から取得され得られた位置情報を基に第1DBを検索して位置情報に対応する場所名称を得て、その位置情報に対応する場所名称を、通信ネットワークを介して携帯端末に送信し、携帯端末は受信した場所名称を表示手段に表示する。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
情報処理装置、表示制御方法、プログラム及び情報記憶媒体
【課題】地図を表示させることなく、測位手段により測定された位置の軌跡をユーザに理解しやすい形で表示すること。
【解決手段】位置を順次測定する測位部60と、前記測位部60により測定される位置を複数記憶する位置座標記憶部62と、前記位置座標記憶部62に格納される位置を示す文字列を測定順に並べて表示する他ユーザ情報提供部70と、を含み、測位部60は、新たに測定された位置が前記位置座標記憶部62に記憶されている最新の位置から所定距離以上、離れている場合に、前記新たに測定された位置を前記位置座標記憶部62に格納する。
(もっと読む)
ゴルフアドレス調整システム
【課題】アドレス姿勢確認システムを提供する。
【解決手段】ゴルフアドレス姿勢確認システムは、位置情報を取得する測位装置を含む第1、第2測定部を備える。2つの測定点における位置情報に基づいて、2つの測定点を結ぶ直線を特定する制御部を備える。告知部を備える。第1測定部は使用者の一方の肩に取り付けられる。第2測定部は使用者の他方の肩に取り付けられる。制御部は、アドレスに入る前に、使用者が第1位置に移動した時に第1測定部を使って得た第1位置情報と、第2位置に移動した時に第1測定部を使って得た第2位置情報とに基づいて、第1直線を特定する。アドレスに入る時に、特定の時間間隔で、第1特定部で取得した位置情報と、第2測定部で取得した位置情報とに基づいて、使用者の両肩を結ぶ第2直線を特定する。制御部は、第1直線と第2直線とが平行な状態にあるか否かを判断し、告知部は、制御部による判断結果を使用者に告知する。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
1 - 20 / 139
[ Back to top ]