
Fターム[5J062AA12]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 速度 (203)
Fターム[5J062AA12]に分類される特許
1 - 20 / 203
速度推定装置及びプログラム
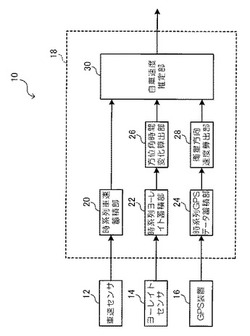
【課題】観測衛星数が少ない環境でも、安定して精度良く移動体の速度ベクトルを推定する。
【解決手段】車速データVtwheel、ヨーレイトデータωt、及びGPSデータを時系列に取得し、各々を時系列車速蓄積部20、時系列ヨーレイト蓄積部22、及び時系列GPSデータ蓄積部24に保存する。方位角時間変化算出部26で、時系列のヨーレイトデータωtに基づいて、方位角の時間変化θtgyroを算出し、衛星方向速度算出部28で、衛星方向速度Vstiを算出する。自車速度推定部30で、GPSデータに基づいて速度ベクトルを推定するための方程式であって、時刻毎に変化する未知パラメータの時間変化分を、方位角の時間変化及びクロックドリフトの時間変化で拘束した方程式に、観測値を代入して、時刻数×各時刻の観測衛星数分の方程式を立式し、得られたパラメータを用いて、自車両の速度ベクトルを推定する。
(もっと読む)
ナビゲーション装置

【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
(もっと読む)
移動情報判定装置、受信機、及びそれについての方法
【課題】移動情報を判定するための移動情報判定装置、及び方法を提供する。
【解決手段】移動情報判定装置は、地球中心補助物(ECA)情報獲得モジュールと、高度情報及び位置情報保存モジュールと、移動情報計算モジュールとを備える。高度情報及び位置情報保存モジュールは、移動情報判定装置の初期位置情報及び移動情報判定装置の高度情報を提供する。ECA獲得モジュールは、移動情報判定装置の現在位置における地球の半径を獲得する。移動情報計算モジュールは、地球の半径及び複数の衛星が提供する複数の信号に基づいて、移動情報判定装置の現在位置及び/または速度を計算する。
(もっと読む)
情報処理装置、情報処理方法、並びにプログラム
【課題】精度を向上させた位置情報の記憶を行う。
【解決手段】自己の位置を測位する測位部と、測位部により測位された位置情報を記憶する記憶部と、測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、予想部で予想された距離が、第1の時間に対応する閾値を超えたか否かを判断し、距離が閾値を超えたと判断された場合、記憶部に記憶されている最新の位置情報を、記憶部からクリアするように制御する制御部とを備える。本技術は、ナビゲーションシステムに適用できる。
(もっと読む)
測位システム、測位端末装置および測位方法
【課題】測位端末装置が取得した測位データをその都度測位サーバに転送せず、測位サーバが所定のタイミングで転送される測位データに基づいて測位端末装置の測位を精度よく行う。
【課題手段】1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
(もっと読む)
移動体回転半径測定装置及び方法
【課題】移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供すること。
【解決手段】移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出した東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
(もっと読む)
端末装置
【課題】従来、端末装置が存在する領域を精度高く判断できなかった。
【解決手段】自身が存在する領域が第一領域であるか、第一領域とは異なる第二領域であるかを判断する端末装置であって、1または2以上の各測位衛星から信号を受信する信号受信部と、前記信号受信部が受信した2以上の信号を代表する値である代表値を算出する代表値算出部と、前記信号受信部が受信した2以上の信号の分散具合を示す値である分散具合値を算出する分散具合値算出部と、前記代表値および前記分散具合値を用いて、端末装置が第一領域に存在するか、第二領域に存在するかを判断し、判断結果を取得する判断部と、前記判断部が取得した判断結果を出力する出力部とを具備する端末装置により、端末装置が存在する領域を精度高く判断できる。
(もっと読む)
路面勾配算出装置及び方法
【課題】走行する移動体上でリアルタイムに、かつ、高精度に路面勾配を算出できる路面勾配算出装置及び方法を提供すること。
【解決手段】路面勾配算出装置10は、移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機101と、移動体の略重心位置に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMU102とを備える。そして、路面勾配算出装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した速度の水平方向の速度を積算し、水平方向相対距離を算出し、算出した速度の垂直方向の速度を積算し、垂直方向相対距離を算出し、算出した水平方向相対距離が所定の水平方向距離になる区間ごとに、算出した水平方向相対距離と、算出した垂直方向相対距離とに基づいて、路面勾配を算出する。
(もっと読む)
移動体横流れ量計測装置及び方法
【課題】移動体の横流れ量を高精度に計測することができる移動体横流れ量計測装置及び方法を提供すること。
【解決手段】移動体横流れ量計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した計測開始時の速度から計測開始時の方向を算出し、算出した水平方向の速度を方位ごとに積算して東西南北方向の相対距離を算出し、算出した方位ごとの相対距離を、計測開始時の方向を基準とした座標系の距離に変換する。さらに、移動体横流れ量計測装置10は、水平方向の速度を積算して移動距離を算出し、算出した移動距離と、変換された座標系の距離のうち横流れ量を示す距離とを対応させて表示器1022に表示する。
(もっと読む)
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法
【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
全地球的航法衛星システム用受信機及びその制御方法
【課題】不必要な電力消費を低減することができるGNSS受信機の制御方法等を提供する。
【解決手段】第1の動作状態において動作する全地球的航法衛星システム(GNSS)用受信機の制御方法は、状態切替え基準を設けるステップと、少なくとも1つのポジショニング情報を得るステップと、状態切替え基準及び得られたポジショニング情報に従って第1の状態から第2の状態へ切り替えるべきかどうかを決定するステップとを有し、第1及び第2の動作状態の夫々の下で動作するGNSS受信機の電力消費は異なる。
(もっと読む)
相対位置推定装置及びプログラム
【課題】少ないデータ通信量で、他の装置との相対位置を精度良く推定することができるようにする。
【解決手段】位置・速度ベクトル算出部24によって自車両の位置及び速度ベクトルを算出する。無線通信部18によって、相手車両の位置及び速度ベクトルを受信する。位置差分相対位置算出部26によって、受信された相手車両の位置から、各時刻について相手車両の相対位置を算出する。軌跡算出部32によって、自車両の速度ベクトルを積算して軌跡を算出する。相手軌跡算出部34によって、受信された速度ベクトルを積算して相手車両の軌跡を算出する。軌跡利用相対位置推定部36によって、自車両の軌跡と、相手車両の軌跡と、各時刻について算出された相対位置とに基づいて、相手車両の軌跡の最適値を推定し、軌跡上の特定点における相対位置を推定する。
(もっと読む)
運転支援装置
【課題】停車状態でのGPSモジュールにより検出される自車両の位置の精度を判定することができるようにする。
【解決手段】GPSモジュールと、他車両情報取得手段と、衝突可能性判定手段と、情報提供手段とを備える運転支援装置において、自車両から出力される車速パルスに基づいて走行速度を検出する車速検出手段と、車速検出手段により検出された走行速度が0である時に、GPSモジュールにより検出された自車両の位置に基づいて、GPSモジュールの検出結果の有効性を判定するGPS有効性判定手段とを備える。
(もっと読む)
運転支援装置
【課題】GPSモジュールから得られる情報に基づく自車両の位置等の検出精度を判定し、かつ当該判定の精度を高める。
【解決手段】GPSモジュール3により検出される自車両1の走行速度と車速検出部13により車速パルスに基づいて検出される自車両1の走行速度との速度差に基づいて、GPSモジュール3により検出される自車両1の位置、進行方位および走行速度の有効性を判定する。さらに、自車両1の加速度に基づいて上記速度差を補正することにより、車速検出部13の応答性とGPSモジュール3の応答性との相違によって上記速度差が過大となることを抑制し、GPSモジュール3により検出される自車両1の位置等の有効性の判定精度を高める。
(もっと読む)
計測システム、移動体装着端末及びデータ処理装置
【課題】 大規模なゲート等の設置を必要とせずに、競走馬に意識させずに設置でき、高速で駆ける競走馬のハロンタイムを確実に自動取得できる計測システム、移動体装着端末及びデータ処理装置を提供する。
【解決手段】 計測システムは、無線中継装置、移動体装着端末及びデータ処理装置を具備する。無線中継装置は、無線通信を行うための無線エリアを形成する。移動体装着端末は、無線エリア内を移動する移動体に装着され、GPSユニット及び無線ユニットを備える。GPSユニットは、移動体の位置情報及び位置情報を取得したときの時刻情報をGPSにより取得する。無線ユニットは、位置情報及び時刻情報を無線信号に変換し、無線信号を無線中継装置へ送信する。データ処理装置は、無線中継装置を介して移動体装着端末からの無線信号を受信し、位置情報及び時刻情報に基づき、移動体が無線エリア内において予め設定された距離を移動するのにかかる時間を算出する。
(もっと読む)
移動体測位方法、移動体測位装置
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータをバッファリングすることと、バッファリングされた前記慣性センサーデータを用いてINS測位演算を行うことと、現在時刻に対するGPS測位の遅延時間を計算することと、GPSデータの出力時刻とGPS測位結果とをバッファリングすることと、バッファリングされた前記GPS測位結果とINS測位結果との時刻同期をとることと、バッファリングされた前記慣性センサーデータと、前記慣性INS測位結果と、バッファリングされた前記GPS測位結果と、をカップリングし、位置・速度・姿勢の誤差を推定することと、前記位置・速度・姿勢の誤差を前記INS測位結果にフィードバックし、補正する。GPSデータと慣性センサーデータの時刻同期をとり、正確なINS測位結果の誤差補正を行うことによって、高精度な移動体測位を行うことができる。
(もっと読む)
GPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラム
【課題】正確な地図データがない場合であってもGPS信号による移動体の位置決めを正確に行うことができる新規なGPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラムの提供。
【解決手段】人工衛星から発信されるGPS信号を連続的に受信し、受信したGPS信号に基づいて所定時間ごとに前記移動体の位置を算定し、算定された所定時間ごとの移動体の算定位置を記憶し、記憶された移動体の算定位置同士の広がり具合に基づいて前記移動体の停止または移動を判断し、移動体が移動したと判断したときに前記移動体の位置を決定する。これによって、正確な地図データや専用のセンサがなくともGPS信号による移動体の位置決めを正確に行うことができる。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】車両速度及びヨーレートの算出精度を向上させることができる、車両用推定航法装置を提供する。
【解決手段】GPS情報から車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、タイヤの回転情報を検出するタイヤ回転情報検出手段と、タイヤの回転情報から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを逐次算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを逐次算出する第2パラメータ算出手段とを備える。
(もっと読む)
ターゲット識別装置およびターゲット移動予測方法
【課題】船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置を提供する。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
(もっと読む)
1 - 20 / 203
[ Back to top ]