
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
201 - 220 / 820
測位装置、測位方法およびプログラム
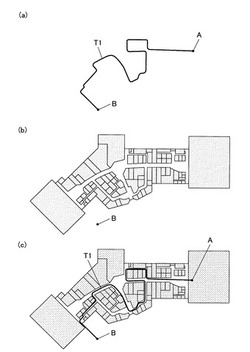
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
位置算出方法及び位置算出装置

【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
衛星からの測位データを用いた測位方法及び測位装置
【課題】測位の精度を向上させる。さらに、装置の低コスト化を実現する。
【解決手段】以下のステップを備える:
(1)測位データを供給する複数の衛星でそれぞれ構成される複数の組を用いて、複数の仮想測位点を算出するステップ;
(2)前記複数の仮想測位点から、第1空間中心を算出するステップ;
(3)前記各仮想測位点について、前記第1空間中心からの外れ距離を算出するステップ;
(4)前記外れ距離に対する、前記各衛星の責任量を算出するステップ;
(5)前記責任量が基準値以上である前記衛星(以後「マルチパス衛星」という)を判別するステップ;
(6)前記マルチパス衛星が関与する仮想測位点を除いた、前記仮想測位点を用いることにより、受信位置を算出して出力するステップ。
(もっと読む)
車両位置推定システム
【課題】GPS信号が受信できない環境下においても確実な位置検出を安価に実現できる技術を提供する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
(もっと読む)
ジオポジショニングおよびローカルモードを実行する位置追跡
【課題】無線装置が、遠距離位置追跡を可能にするためのジオロケーションおよび局所的位置追跡を可能にするための局所的位置技術を利用することにより、目標物に関する位置データを提供する。
【解決手段】ジオロケーションおよび局所的位置技術は、位置追跡装置および位置追跡される装置の両方に、同時にまたは個別に組み込まれてよく、必要に応じて再構成され得る。位置追跡される無線装置は、マルチユーザー無線加入者ネットワークと通信することができる無線通信回路を含む。ジオロケーション読取回路がGPSまたは類似の位置データを提供する。このジオロケーション読取回路はまた、目標物に関するジオロケーションデータを取得することができる。局所的位置検出装置が局所的位置データを構文解析し、ジオロケーションデータに基づいてジオロケーションの指示が提供される。この局所的位置検出装置はさらに、局所的位置データを用いてジオロケーションデータを修正するときに使用される局所的位置データに応答する。
(もっと読む)
測位装置及びプログラム
【課題】自律航法情報等の外部データを必要とすることなく、測位精度を適切に評価する。
【解決手段】GPS受信機16から出力されたクロックバイアス誤差を含む疑似距離から、クロックバイアスBe及び受信位置を算出し、過去n点のクロックバイアスBe、またはGPS受信器から出力されるドップラー情報に基づいてクロックドリフトDを算出し、算出されたクロックドリフトDに基づいて、回帰式、またはカルマンフィルタを用いて基準クロックバイアスBsを推定する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
衛星信号捕捉回路及び衛星信号受信機
【課題】 受信信号レベルに関わらず、確実にかつ高速に衛星信号を捕捉する。
【解決手段】 原則として強信号処理が実行され、予め設定されたときに、弱信号処理が実行される。弱信号処理においては、制御部3は、第1候補抽出部から受け取った複数の候補(信号パワーの累積加算値と、対応する位相コード及び周波数)と、閾値とに基づいて、衛星信号の特定を行う。強信号処理においては、弱信号処理の場合と同様に、制御部3は、第2候補抽出部から受け取った複数の候補(信号パワーと、対応する位相コード及び周波数)と、閾値とに基づいて、衛星信号の特定を行う。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
ナビゲーション装置
【課題】センサフュージョンに利用するセンサが増えた場合であっても、現在地の推定に必要な計算量が低く抑えられたナビゲーション装置を提供する。
【解決手段】ROM34には、種々の状況において各センサに与えられる重みが設定された特性テーブルが記憶されている。CPU31は、現在地の推定処理を行った後、推定された現在地、地図データ、および実行中の処理などの情報を特性テーブルに当てはめ、各々のセンサの重みを算出する。4つのセンサ22a〜22dのうち、重みが所定のしきい値よりも小さいセンサは、CPU31が制御するスイッチ群32により遮断され、CPU31への検出値の出力が行われなくなる。その結果、CPU31はこのセンサを現在地の推定に利用しなくなる。
(もっと読む)
携帯機の車内外判定用テーブルの作成方法
【課題】精度の高い車内外判定を実現可能な携帯機の車内外判定用テーブルを提供すること。
【解決手段】各アンテナで測定された測定データを3次元デカルト座標系の各軸に割り当て、測定データのxy平面への射影データから車内側データの3次元近似曲線を求め、この3次元近似曲線を用いて所要の密度となるように車内側データを補填する。次に、所要の密度となるようにデータ補填した車内側データから任意のz軸方位置でのデータを取り出してxy平面へ射影し、射影データから当該z軸方向位置での車内側データの包絡線を求め、z軸方位置を順次シフトさせて各z軸方向位置での車内側データの包絡線をそれぞれ求め、z軸方向の各位置での車内側データの包絡線の集合から3次元デカルト座標系における車内側データの包絡面を用いて車内外判定用テーブルを構築する。
(もっと読む)
測定を促進する通信方法および装置
不連続モードで動作可能な無線端末(30)、およびそのような無線端末(30)を動作させる方法によって、無線端末(30)の位置に関係する測定を促進する。本方法は、無線アクセスネットワーク(20)からメッセージを受信する工程を含む。測定要求メッセージは、基地局から送信されるダウンリンク信号について無線端末が測定を行うか、または無線端末から送信されるアップリンク信号について基地局が測定を行うことを知らせるように設定される。本方法は、当該メッセージの受信の結果として、または当該メッセージの受信後に、不連続モードから、測定の動作を促進するための修正モードに、無線端末(30)の動作を変更する工程をさらに含む。不連続モードと比べて、修正モードでは、(i)非受信期間および(ii)非送信期間のうちの少なくとも1つが短縮または削除される。「不連続モードから修正モードへの変更」には、(1)無線端末のモードの変更(例えば、(不連続受信(DRX)または不連続送信(DTX)等の)不連続モードから連続送信モードへの変更)と、(2)不連続モード(第1の不連続モード)から修正不連続モード(第2の不連続モード)への変更とのうちの1つ以上が含まれる。  (もっと読む)
(もっと読む)
後処理を用いるリアルタイム・データ(Real−TimeDataWithPost−Processing)
本明細書で開示される主題は、航法解を求める及び/又は予測することに関係する。 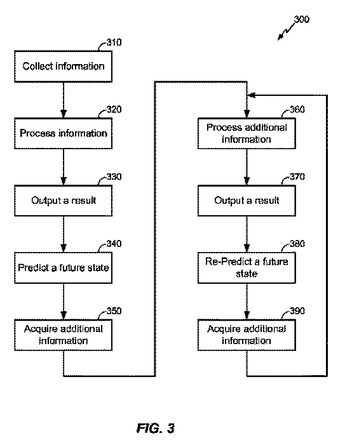 (もっと読む)
(もっと読む)
移動端末装置
【課題】アシスト測位を利用して自己位置を検出する場合に、自己位置を誤認識することを防止する移動端末装置を提供する。
【解決手段】移動端末装置20は、追跡センター100からの問い合わせにより位置検出処理を起動し(S402、S404)、自己位置を検出するためのネットワークアシストを通信ネットワーク30に要求する(S406)。通信ネットワーク30からアシスト情報を受信すると(S408)、アシスト情報に基づいてGPS信号を受信し(S410)、受信したGPS信号を通信ネットワークに送信する(S412)。GPS信号に基づいて演算した位置座標を測位位置として通信ネットワーク20の測位サーバから受信すると(S414)、移動端末装置20は、S400で取得した基地局の位置座標と測位サーバから取得した測位位置とを比較し(S416)、適切な位置を自己位置として追跡センター100に通知する(S418、S420)。
(もっと読む)
車両位置測定装置および車両位置測定方法
【課題】GPS衛星からの電波を受信できない場所において、車両位置の測定精度を向上させること。
【解決手段】現在の車両の位置を推測し、推測された車両の位置を、推測された時刻と対応付けて累積して測位情報記憶部に書き込み、固定して設置された通信装置から送信される信号を受信し、信号が受信された際の車両の位置を受信された信号に基づいて検出し、信号が受信された時刻以降の時刻に対応付けて測位情報記憶部に記憶される車両の位置を、検出された車両の位置に基づいて更新する。
(もっと読む)
受信機
【課題】別途取得した航法データを用いて、追尾可否の判断を行う受信機を提供することにある。
【解決手段】受信機は、例えば、GPS受信機等に適用することができる。当該受信機は、受信手段が衛星から衛星信号を受信し、周波数変換手段が上記衛星信号を中間周波数に変換し、積算手段が参照用信号と上記変換信号とを積算することにより、積算信号を出力し、基準信号生成手段が、所定周波数の基準信号を生成し、追尾判定用相関値出力手段が積算信号と基準信号との相関値である追尾判定用相関値を出力する。予測データ取得手段は、航法データの予測データを取得する。追尾判定手段は、追尾判定用相関値と予測データとを比較する比較処理を行い、比較処理の結果に基づいて追尾判定を行う。
(もっと読む)
路車間通信システム
【課題】路車間通信において得られた情報を用いることで自車両の位置を特定する精度を向上させた路車間通信システムを提供することを課題とする。
【解決手段】トンネル入口付近に設けられた情報提供装置11と車載されたナビゲーションシステムとの間で通信を行う路車間通信システムにおいて、情報提供装置11は設置された位置情報ならびに情報提供装置11より先の道路の道路線形情報を送信提供し、ナビゲーションシステムは、情報提供装置11から送信提供された情報を受信する送受信部12と、CAN14を介して収集された自車両の挙動を認識する走行状態認識部154と、GPS13により自車両の位置を認識する位置認識部152と、情報提供装置11から送信提供された情報に基づいて自車両の位置を補正し、補正された自車両の位置と自車両の挙動とに基づいて、自車両の位置を特定する自車位置処理部155とを備えて構成される。
(もっと読む)
受信機
【課題】受信装置を搭載した移動体が走行している道路情報を取得し、取得した道路の軌道と受信信号から得られる情報とを用いて測位し、取得する道路情報を限定した受信装置を提供することにある。
【解決手段】移動体に備え付けられる受信装置であって、衛星信号受信手段が衛星から衛星信号を受信し、信号処理手段が前記衛星信号から衛星位置情報と、誤差を含んだ前記衛星から前記受信装置までの距離である擬似距離情報とを算出し、道路情報取得手段が、限定された道路に関する3次元の道路情報を取得し、測位計算手段が前記道路情報に基づいた軌道、前記衛星位置情報、及び前記擬似距離情報に基づいて前記受信機の位置情報を算出する。
(もっと読む)
マルチパス判定装置及びプログラム
【課題】簡単な構成で、GPS衛星からの受信信号がマルチパスであるか否かを精度よく判定することができるようにする。
【解決手段】GPS情報取得部20によって、GPS衛星からの電波を受信する。GPS情報取得部20によって、GPS衛星の情報、及びGPSアンテナ12A、12B間の受信信号の位相差を取得する。到来波相対方向推定部24によって、GPS衛星からの受信信号の位相差に基づいて、各GPS衛星からの電波の相対的な到来方向を推定する。到来波絶対方向算出部22によって、GPS衛星の情報に基づいて、各GPS衛星からの電波の絶対的な到来方向を各々算出する。マルチパス判定部26によって、推定された各GPS衛星からの電波の相対的な到来方向と、算出された各GPS衛星からの電波の絶対的な到来方向とを全体として比較することにより、各GPS衛星からの受信信号がマルチパスであるか否かを各々判定する。
(もっと読む)
201 - 220 / 820
[ Back to top ]