
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
21 - 40 / 820
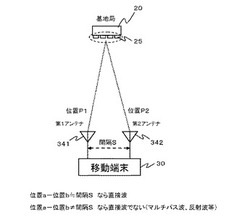
位置標定方法、及び位置標定システム
【課題】簡素な方法により移動体の位置の標定精度を向上させる。
【解決手段】基地局20に複数のアンテナ251を隣接配置し、移動端末30に第1アンテナ341及び第2アンテナ342を間隔Sだけ離間させて配置する。基地局20はアンテナ251の夫々により第1アンテナ341から送られてくる位置標定信号900を受信し、各アンテナ251の受信信号の位相差に基づき第1アンテナの位置P1を求め、複数のアンテナ251の夫々により、第2アンテナ342から送られてくる位置標定信号900を受信し、各アンテナ251の受信信号の位相差に基づき第2アンテナの位置P2を求める。基地局20は、求めた位置P1と位置P2の差の絶対値(|P1−P2|)を間隔Sと比較し、第1アンテナ341又は第2アンテナ342から送信された位置標定信号900が直接波であるか否かを判定する。
(もっと読む)
位置検出システム、端末装置及び位置検出プログラム

【課題】付近にある他の端末装置等で検出した位置を用いて位置検出を行うことができ、位置検出の確度を向上させることができる位置検出システム等を提供すること。
【解決手段】リクエスト側のユーザ端末装置10の情報送受信部41は、近くのユーザ端末装置10に対して、位置情報とGPSの電波強度の送信を求める。他のユーザ端末装置10の情報送受信部41は、各々のGPS受信部16からの位置情報と電波強度を、送信を求めたユーザ端末装置10宛に送信する。これを受信したユーザ端末装置10の座標算出部45は、受信した位置情報と電波強度及び近距離通信電波強度検知部42が検知した近距離無線通信の電波強度等に応じて、当該ユーザ端末装置10の位置を算出する。
(もっと読む)
GPS妨害電波位置特定システム及びGPS妨害電波位置特定方法
【課題】本発明は、GPS妨害電波位置特定システム及びGPS妨害電波位置特定方法に係り、GPS電波を妨害する妨害電波を発信する妨害電波発信源の位置をその受信強度の大きさに関係なく特定することにある。
【解決手段】移動体が、衛星から送信されるGPS電波に含まれるGPS情報に基づいて位置を特定する位置特定手段と、GPS電波の受信状態の良否を判定する受信状態判定手段と、を有し、また、その受信状態が不良状態から良状態へ変化したとき又は/及び良状態から不良状態へ変化したときに特定される位置を示す情報を送信する。また、サーバが、移動体の情報送信手段から送信される位置を示す情報を受信し、その受信された位置を示す情報に基づいてGPS電波が妨害される妨害電波エリアを作成し、そして、その妨害電波エリア内にGPS電波を妨害する妨害電波を発信する妨害電波発信源が存在すると判定する。
(もっと読む)
移動体横流れ量計測装置及び方法
【課題】移動体の横流れ量を高精度に計測することができる移動体横流れ量計測装置及び方法を提供すること。
【解決手段】移動体横流れ量計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した計測開始時の速度から計測開始時の方向を算出し、算出した水平方向の速度を方位ごとに積算して東西南北方向の相対距離を算出し、算出した方位ごとの相対距離を、計測開始時の方向を基準とした座標系の距離に変換する。さらに、移動体横流れ量計測装置10は、水平方向の速度を積算して移動距離を算出し、算出した移動距離と、変換された座標系の距離のうち横流れ量を示す距離とを対応させて表示器1022に表示する。
(もっと読む)
路面勾配算出装置及び方法
【課題】走行する移動体上でリアルタイムに、かつ、高精度に路面勾配を算出できる路面勾配算出装置及び方法を提供すること。
【解決手段】路面勾配算出装置10は、移動体に設置され、GPS衛星からGPS搬送波を受信するGPS受信機101と、移動体の略重心位置に設置され、3次元の角速度と加速度とを求めるためのデータを出力するIMU102とを備える。そして、路面勾配算出装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した速度の水平方向の速度を積算し、水平方向相対距離を算出し、算出した速度の垂直方向の速度を積算し、垂直方向相対距離を算出し、算出した水平方向相対距離が所定の水平方向距離になる区間ごとに、算出した水平方向相対距離と、算出した垂直方向相対距離とに基づいて、路面勾配を算出する。
(もっと読む)
停止/移動判定方法
【課題】測位演算を行わずに受信機を備える移動体の停止/判定方法を実現する。
【解決手段】停止/判定方法は、GPS衛星の衛星信号を受信することと、衛星信号を受信することと、衛星信号の所定時間mにおける信号強度を保存することと、所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、閾値を決定することと、パラメーターと前記閾値とを比較し、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。
(もっと読む)
位置標定可用性を増加させるための手続
【課題】位置を決定するためのスキームの各々は、時々不正確になりまたは利用できないかもしれない。従って、任意の位置決定スキームを使用した移動局またはネットワークは、移動局の現在の位置を決定するように求められたとき何らの結果も得ることができないかもしれないし、または不正確な結果を得るかもしれない。それゆえ、より大きな信頼度で移動局の位置をより確実に決定するための装置、方法およびシステムを提供する
【解決手段】位置決定の第1のスキームを用いて移動局の位置を決定すること、および第1のスキームが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を返すまでまたは(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において、第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて位置決定することを反復する。
(もっと読む)
位置算出方法
【課題】デジタルカメラなどの撮影画像に位置情報を付与するとき、必要なタイミングで撮影位置算出を完結できない場合であっても、後刻において、過去の希望時刻における位置算出を可能とする技術を提供する。
【解決手段】位置算出方法は、撮像装置の撮像部の手ぶれ振動を検出すること(ステップS20)と、現在時刻を保持すること(ステップS30)と、撮像装置の少なくとも加速度情報を含むセンサーデータを計測すること(ステップS30)と、検出した手ぶれ振動が所定の状態であるか判断することと(ステップS60)、検出した手ぶれ振動が所定の状態であると判断したときに、現在時刻とセンサーデータとを対応付けて保存し、かつ衛星からの信号に基づいて測位した撮像装置の絶対位置及びセンサーデータを使って撮像装置の位置を算出すること(ステップS70)と、を含む。
(もっと読む)
密結合GPSおよび推定車両航法
【課題】密結合GPSおよび推測航法システムは、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両範囲および方向を演算する。
【解決手段】推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補正は、GPS fixから演算され、それは、GPS信号受信の長い休止期間中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。
(もっと読む)
測位信号捕捉支援ウィンドウ評価のための方法およびシステム
【課題】測位信号捕捉支援ウィンドウ評価のための方法およびシステムの提供。
【解決手段】アシスト位置探索システムの測位信号捕捉支援ウィンドウの品質を検査する。捕捉支援ウィンドウの適合性は実観測に基づく移動局10からの特定の位置測定の実観測に基づく知識あるいは仮想位置測定の知識を使用して検査される。基地局アルマナック管理装置BSAは移動局測定データを捕捉支援ウィンドウ・データと比較し、ウィンドウ品質値(WQ)、或いは、ウィンドウ品質値の範囲を含む、比較に基づく結果を記録する。捕捉支援ウィンドウの生成に使用されるソース・データはウィンドウ品質値に従って調整される。
(もっと読む)
携帯端末装置、速度算出方法及び速度算出プログラム
【課題】GPS情報が取得できない区間で、適切な車両の速度を算出すること。
【解決手段】GPS情報に基づく速度を取得する取得部と、速度から求められる加速度と、加速度センサのデータとの相関係数、相関値を算出する第1算出部と、GPS情報が受信不可の区間において、相関係数及び相関値と加速度センサのデータとを用いて加速度を算出する第2算出部と、第2算出部により算出された加速度と、区間の前後で取得された速度とを用いて、区間内の速度を算出する第3算出部と、を備える。
(もっと読む)
軌道予測装置、及び軌道予測方法
【課題】演算にかかるコストを削減できる軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した新たな位置算出手法の提案。
【解決手段】衛星測位用ユニット3の第1の計測結果と慣性測位用ユニット5の第2の計測結果とを用いて、カップリング処理部7がカップリング処理を行う。そして、信号捕捉支援情報演算部9が、カップリング処理の結果を用いて、カップリング処理において不使用の衛星信号を捕捉する場合のドップラー周波数(信号捕捉支援情報)を推定する。そして、衛星測位用ユニット3が、信号捕捉支援情報演算部9により推定されたドップラー周波数を用いて不使用の衛星信号を捕捉する。
(もっと読む)
自動車を発見しかつ追跡するためのデバイス
【課題】衛星ナビゲーションに基づいた乗り物の発見・追跡デバイスを改善すること。
【解決手段】本発明は乗り物の発見及び追跡のためのデバイスに関し、前記デバイスは、
現在の乗り物の位置を決定するための位置決定デバイス(12)と、
通信チャネル(18)を介して現在の乗り物の位置を受信器(16)へ送信するための送信デバイス(14)と、
動作中の妨害送信器を発見するため及び妨害送信器(30)の発見が特定のアクションをトリガするための手段(20、26、28)と、を有する。
(もっと読む)
軌道予測装置、及び軌道予測方法
【課題】予測誤差を削減することを可能にする軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、受信データに基づいて測位衛星の位置と速度である位置速度情報を算出する衛星位置速度算出部と、衛星位置速度算出部が算出した前記位置速度情報が時刻毎に記憶されている記憶部と、記憶部に記憶されている位置速度情報に基づき測位衛星に位置を推定する軌道予測部と、を備え、衛星位置速度算出部は、記憶部に予め定められている個数以上の位置速度情報が記憶されている場合、時刻が近接する2個の位置速度情報同士を比較して位置速度情報の記憶を開始してからの経過時間が大きい方の位置速度情報を削除した後、算出した位置速度情報を記憶部に記憶させる。
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
検出装置及び方法
【課題】通信インフラを必要とせず、対象物との位置関係を有効に把握することを可能とする検出装置及び方法を提供する。
【解決手段】本発明による検出装置は、電波の発信源の位置を検出するための検出装置であって、複数のアンテナ(101〜104)と、前記複数のアンテナを介して前記発信源からの電波をそれぞれ受信する複数の受信部(201〜204)と、前記複数の受信部でそれぞれ受信された前記電波の各受信強度の相対値を演算し、該相対値を正規化して観測値として出力する演算部(300)と、前記観測値に基づいて前記発信源の位置を判定する判定部(400)とを備える。これにより、対象物の位置を検出する。
(もっと読む)
位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラム
【課題】GPS衛星が不可視である環境下で高精度に位置を標定する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】慣性測位用ユニット及び衛星測位用ユニットそれぞれの計測結果を併用して、位置をより正確に算出するための手法の提案。
【解決手段】位置算出装置1において、移動体に設置された慣性測位用ユニット2の計測結果を用いて、少なくとも移動体の位置を演算する第1の演算処理が第1の演算処理部5により実行される。また、第1の演算処理の結果と、移動体に設置された衛星測位用ユニット3の計測結果とを用いて、移動体の位置を演算する第2の演算処理が第2の演算処理部7により実行される。そして、第1の演算処理の結果と、第2の演算処理の結果とを用いて、第1の演算処理に係る演算係数が演算係数調整部9により調整される。
(もっと読む)
受信方法、測位装置、及び電子機器
【課題】測位装置が受信中の屋内情報送信機以外の屋内情報送信機からの測位用信号を受信して、安定的に航法メッセージをデコードできる受信方法、測位装置、及び電子機器を提供する。
【解決手段】受信方法は、測位用信号をサーチし、受信した測位用信号が衛星からの信号か又は屋内情報送信機からの信号か(ステップS30)、及び測位装置が受信中の屋内情報送信機であるか否か(ステップS40)を判定し、受信した測位用信号が、測位装置が受信中の屋内情報送信機以外の信号であるときに、所定の時間AGC制御を制限する(ステップS50)。
(もっと読む)
21 - 40 / 820
[ Back to top ]