
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
81 - 100 / 820
測位装置、及び測位方法
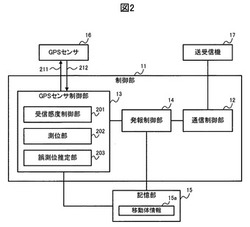
【課題】様々な場所でできるだけ正確な位置を測位できるようにする。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
(もっと読む)
マルチパス信号判定方法、信号適否判定方法及びマルチパス信号判定回路

【課題】 演算量を増加させたり、回路規模を増大させることなく、マルチパス信号の判定を適切に行うこと。
【解決手段】相関演算を行った各サンプリング位相の相関値それぞれをIQ座標上に順次プロットした場合に、それらのプロット位置が閉曲線状に配列されているか否か、或いは直線状に配列されていないか否かを検出するといった簡単な方法で、受信信号がマルチパス信号であるか否かを判定する。更に、配列された閉曲線の広さに基づいて、測位に使用可能か否かを判定する。
(もっと読む)
測位精度判定装置
【課題】GPS測位の位置誤差の大小が判定できる測位精度判定装置を提供する。
【解決手段】速度センサ2による速度センサ由来速度と衛星測位速度演算部6による衛星測位速度とドップラー速度演算部7によるドップラー速度と加速度センサ由来速度演算部8による加速度センサ由来速度についてそれぞれ移動距離を演算する移動距離演算部9と、衛星測位速度から得た移動距離と他の移動距離とのの差を演算し、差が閾値より大のとき、GPS測位精度が低下していると判定する精度判定部10とを備える。
(もっと読む)
位置推定方法、端末装置及びプログラム
【課題】位置推定方法、端末装置及びプログラムに関し、位置推定精度を低下させることなく端末装置の消費電力を低減することを目的とする。
【解決手段】端末装置の移動距離を算出し、移動方向の変化が検出されてから所定時間後に絶対位置を取得する処理を繰り返し、1回目の処理で取得した第1の絶対位置と2回目の処理で取得した第2の絶対位置を通る移動距離の長さを有する第1のリンクを算出し、第1及び第2の絶対位置と3回目の処理で取得した第3の絶対位置に最も近く第1の絶対位置を通らない移動距離の長さを有する第2のリンクを算出する。第1及び第2のリンクの第1の絶対位置に対する方位を示す角度の差が所定値以内であれば第2のリンクの角度を第1の絶対位置の直前のリンクと直後の第1のリンクとがなす角度とみなし、第1の絶対位置の直前のリンクと直後の第1のリンクを接続したリンク形状に基づいて端末装置の現在位置を推定するように構成する。
(もっと読む)
信号予測の方法、装置およびシステム
【課題】大規模なメモリ装置を組み込まなければならない過度の重荷なしに、受信機に長いコヒーレントインテグレーションオン信号受信を実行させる、信号予測の方法、装置およびシステムを提供する。
【解決手段】サブフレームがタイムヘッドを設定してそれをTOWに加算し、TOWの値に基づいたTLMメッセージを設定し、予測されたサブフレームのCRCを発生する暦のサブフレームであるか否かを決定することができる処理装置と、予測されたサブフレームを記憶するメモリとを含む。メモリは予測されたサブフレームの数に基づいてサイズを変化する。処理装置はさらにメモリの予測されたサブフレームの位置を計算し、有効なフラグを設定して、TOWの値が週の秒数より少ないか否かを決定することができる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 絶対位置データが得られないまま自律航法の測位が行われ、その後に、絶対位置データが取得された場合でも、始端からの一連の位置データを正確に求められる測位装置、測位方法およびプログラムを提供する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
(もっと読む)
衛星測位装置
【課題】より精度良く現在位置を算出する「衛星測位装置」を提供する。
【解決手段】各時点tにおいて、直前の時点で算出した現在位置P(t-1)と衛星測位部14で算出された時刻tの衛星測位位置Ps(t)に基づく時刻tの移動ベクトルVs(t)と、速度ベクトル算出部15において算出された時刻tの速度ベクトルV(t)に基づく時刻tの時刻t-1に対する移動量と移動方向を表す移動ベクトルVd(t)とを求め、移動ベクトルVs(t)と移動ベクトルVd(t)の差分ベクトルの大きさがしきい値Th以上であるかどうかを調べる。そして、差分ベクトルの大きさがしきい値Th以上であれば、衛星測位位置Ps(t)に誤りが発生しているものと見なして、衛星測位位置Ps(t)に代えて、直前の時点で算出した現在位置P(t-1)に時刻tの速度ベクトル基準移動ベクトルVd(t)を加えた位置を時刻tの現在位置P(t)として算出する。
(もっと読む)
位置情報の決定
【課題】物体から受信機の一つへの直接信号が遅延した反射信号と比べて弱い場合でも精度良く物体の位置を決定する。
【解決手段】複数の受信エレメントを含む、受信するための手段と、受信エレメントで受信された信号106を検出し、受信信号を表す出力信号を生成するための検出手段と、各受信エレメントごとに、他の任意の受信エレメントで受信される信号から生成される任意の出力信号とは別に、その受信エレメントで受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号106を表すパラメータのそれぞれの値を得るように動作可能な処理手段とを含み、処理手段はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得する。
(もっと読む)
受信信号判定方法、プログラム、測位装置、及び電子機器
【課題】AGCゲインを調節しクロスコリレーションを排除する受信信号判定方法、プログラム、測位装置、及び電子機器を提供する。
【解決手段】受信信号判定方法は、受信した第1測位信号のSNRが所定値以上の信号であるか否か(ステップS40)、第1測位信号と第2測位信号とが同じ情報であるか否か(ステップS50)、第1測位信号と第2測位信号とが同じ周波数であるか否か(ステップS60)、及び第2測位信号のSNRが所定値以下であるか否か(ステップS70)を判定することで、第1及び第2測位信号間でクロスコリレーションが発生しているか否かを判定すること、を含み、クロスコリレーションが発生していると判定した場合、第2測位信号のSNRが受信される通信信号のSNRの範囲の最低値未満になるように、AGCを制御する。
(もっと読む)
電波監視装置、及び電波監視方法
【課題】広域の監視対象エリアから監視対象(電波発射源)の位置を推定する際に、複数の方位センサの中から最適な方位センサを自動で選択する。
【解決手段】監視対象エリア1における監視対象2の位置を特定する位置特定情報(緯度・経度等)20bを、位置関連情報(住所・郵便番号等)20aと関連づけてデータベース20に登録する。位置検索部17は、監視対象2の位置関連情報20aを基にデータベース20を検索し、監視対象2の概略位置を特定する。最適センサ選択部18は、位置検索部17により特定された監視対象2の位置から各方位測定部(方位センサ)15までの距離を算出し、監視対象2からの距離が近い順に方位測定部15を2つ以上選択する。発射源位置推定部19では、選択された各方位測定部15により測定されたそれぞれの発射源方位の交点を求めることにより、監視対象2の位置を推定する。
(もっと読む)
車両用電子キーシステム
【課題】電子キーを落とした場合にユーザに対して適切な報知ができる車両用電子キーシステムを提供することを課題とする。
【解決手段】車両20で使用される電子キー10をユーザが落とした場合にユーザに報知する車両用電子キーシステム1であって、電子キーが落下したか否かを判定する判定手段と、電子キー10が落下したと判定した場合には電子キー10と車両20との間の距離Xを算出する距離算出手段と、距離Xに応じてユーザへの報知方法を選択する選択手段とを備え、判定手段で電子キーが落下したと判定した場合に選択手段で選択した報知方法によってユーザへ報知することを特徴とし、特に、距離算出手段で電子キー10と携帯電話40との間の距離Y及び車両20と携帯電話40との間の距離Zも算出し、選択手段で3点間距離X,Y,Zに応じてユーザへの報知方法を選択すると好適である。
(もっと読む)
無線通信を利用した周辺車両感知システム及びその方法
【課題】周辺車両との衝突を予測できる無線通信を利用した周辺車両感知システム及びその方法を提供する
【解決手段】 本発明に係る無線通信を利用した周辺車両感知システムは、無線信号を発生させる複数個の無線信号発信部と、周辺車両から発生した無線信号を受信する複数個の無線信号受信部と、受信された無線信号の強度に応じて周辺車両との距離を算出する周辺車両距離算出部と、前記複数個の無線信号受信部の間の距離と前記算出された周辺車両との距離を利用し、前記周辺車両の位置を推定する周辺車両位置推定部と、前記周辺車両の位置を利用して前記周辺車両の時間当り移動距離から前記周辺車両の走行速度を推定する周辺車両走行速度推定部と、前記周辺車両の位置を利用して前記周辺車両の走行方向を推定する周辺車両走行方向推定部とを含むことを特徴とする。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】短期間であっても角速度の導出精度を向上させる技術を提供する。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
衛星信号判定装置及びプログラム
【課題】GPS受信機が内部に設けられていても、測位衛星の遮蔽状態を精度良く判定することができるようにする。
【解決手段】車両方向推定部30によって、各GPS情報と、検出された車速及びヨーレートとに基づいて、車両の進行方向の絶対方向を推定する。衛星方向推定部32によって、各GPS情報に基づいて、各測位衛星が存在する絶対方向を推定する。衛星方向推定部32によって、車両の進行方向の絶対方向、及び各測位衛星の絶対方向に基づいて、車両の進行方向に対する各測位衛星の相対方向を算出する。遮蔽判定部38によって、各測位衛星について、車両の進行方向に対する相対的な立体方向の範囲を分割した複数の分割範囲のうち、算出された相対方向が属する分割範囲に対して予め定められたS/Nの閾値を用いて、当該測位衛星の衛星信号のS/Nが、閾値以上であるか否かを判定して、当該測位衛星の遮蔽状態を判定する。
(もっと読む)
移動体用測位装置及びカーナビゲーション装置
【課題】測位精度を維持しながら省電力化が可能な移動体用測位装置を提供する。
【解決手段】GPS受信器10で、GPS衛星から送信される信号を受信し、受信した信号に基づいて車両の現在位置を検出する。制御部40では、車速センサ20により検出した車両の走行速度と方位センサ30で検出した車両の方位に基づいて、車両の現在位置を推測する。推測した車両の現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正した後、GPS受信器10の電源をオフし、その時点から、車速センサ20の車速検出誤差及び方位センサ30の方位検出誤差のうち少なくとも1つの誤差の時間経過に伴う累積値に基づき、車両の推測現在位置の誤差を算出し、誤差が予め設定した許容範囲を超えたときに、GPS受信器10の電源をオンして、車両の推測現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正するという動作を繰り返す。
(もっと読む)
運転評価装置
【課題】GPS受信状況によって車両挙動の推定精度が低下する場合にあっても、適切な方法で運転評価値を算出して表示する。
【解決手段】運転安定度評価装置は、GPS受信信号を取得し(S101)、GPS受信信号に受信時刻を設定し(S102)、車両の速度を算出し(S103)、車両の現在位置と受信時刻と車両の速度に基づいて車両の挙動の推定値を算出し(S104)、受信時刻から求められる車両の現在位置の更新時間に基づいて、挙動推定値の精度を算出する(S105)。そして、この挙動の推定値と挙動推定値の精度に基づいて、走行に関する評価値を算出し(S107)、その評価値を表示する(S108)。
(もっと読む)
ビット変化判定方法及びビット変化判定装置
【課題】航法メッセージデータのビット値の変化の有無を判定するための手法の提案。
【解決手段】GPS衛星信号を受信した受信信号とレプリカCAコードとの相関演算を行う。そして、連続するN個(N≧1)の単位期間である第1の増感期間に含まれるビット遷移タイミングにおけるビット値の変化(遷移)の有無を判定する第1の事前判定、及び、第1の増感期間に隣接する連続するM個(M>1)の単位期間である第2の増感期間に含まれるビット遷移タイミングにおけるビット値の変化(遷移)の有無を判定する第2の事前判定としての予備判定を行う。その予備判定の結果に基づいて、単位期間毎の予備合算値を所定の増感時間分合算する。そして、第1及び第2の増感期間について算出した合算値を用いてIQ内積値を計算し、当該IQ内積値に基づいて、第1の増感期間と第2の増感期間との境目における航法メッセージデータのビット値の変化の有無を判定する。
(もっと読む)
受信装置及び受信方法
【課題】通信フレームが検出された時刻と実際の受信時刻との差をできるだけ小さくする
【解決手段】各受信部2は、それぞれ同一の通信フレームを受信する。各遅延部5は、受信部2のそれぞれから入力した通信フレームの位相が一致するように、それぞれの通信フレームを遅延させる。通信フレーム取得部6は、各遅延部5から入力したそれぞれの通信フレームを合成することで1つの通信フレームを取得する。遅延部5と並列に設けられたT1計測部8、演算部9、前値比較部10、1・2系比較部11及び選択部12は、協働して、受信部2から入力した通信フレームのフレームパルスを検出した時刻を特定する。
(もっと読む)
81 - 100 / 820
[ Back to top ]