
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
101 - 120 / 820
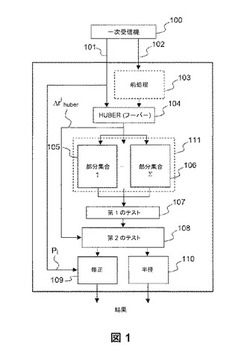
擬似的距離測定値の選定による位置推定の修正方法
【課題】擬似的距離測定値の選定による位置推定の修正方法を提供する。
【解決手段】改善された位置Xhuberが、ナビゲーション受信機とN基の衛星との間の測定距離に相当する、擬似的距離ρiのN個の測定値(102)、及び前記受信機によってなされた前記受信機の位置の推定値Xprim(103)を用いて、ロバスト推定アルゴリズムの適用(104)により決定される。測定値ρiからの擬似的距離の剰余Δρihuberよりのノルム剰余値Δrihuberを決定するステップと、N−k個のノルム剰余値Δrihuberを含むシグマ(ギリシア文字σの大文字)個の部分集合(105、106)を決定するステップ(111)と、最小の標準偏差σSEOを伴う部分集合SEOを選定するステップと、異常でない測定値を選定するステップ(107)と、選定された測定値からの位置の修正された推定値Xclnを決定するステップとを含む。
(もっと読む)
位置教示システム

【課題】携帯端末の大型化を抑制しつつ、マルチパスに対応可能である位置教示システムを提供する。
【解決手段】カーファインダシステム3は、車両2に設けられた複数の発信アンテナから電子キー1側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、電子キー1に設けられたアレーアンテナ15aが受信することで、車両2の各発信アンテナから発信された信号を平均化処理して、到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部11bを備える。そして、カーファインダシステム3は、位置推定部11bが演算した位置情報を表示部19によって使用者に教示する。
(もっと読む)
位置教示システム
【課題】対象物及び携帯端末の構成が簡易であるとともに、携帯端末の大型化が抑制された位置教示システムを提供する。
【解決手段】カーファインダシステム3は、電子キー1に設けられた複数のアンテナ14a,14b,14cから車両2側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、車両2に設けられたアンテナが受信することで、車両2のアンテナから発信された探索信号Sseを電子キー1が同時受信したかのように取り扱うとともに、探索信号Sseから到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部21bを備える。そして、カーファインダシステム3は、位置推定部21bが演算した位置情報を車両2から発信し、位置情報を電子キー1が受信して表示部19によって使用者に教示する。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 電車による移動を含む移動経路の軌跡を精度良く取得することのできる低消費電力の測位装置、測位方法、プログラムを提供する。
【解決手段】
現在位置を測定する絶対位置測定手段(15)と、絶対位置測定手段の動作タイミングを制御して非連続的に現在位置を測定させる測位制御手段(10)と、動作の計測を行う移動計測手段(15、16)と、移動計測手段の計測結果に基づいて動作種別の判定を行う動作内容判別手段(21)と、鉄道路線図の情報を記憶する地図データ記憶手段(13a)と、絶対位置測定手段により測定された位置情報、及び、鉄道路線図の情報に基づいて、動作内容判別手段により列車移動状態であると判定された期間の移動経路を判別する移動経路判別手段(10)と、を備える。
(もっと読む)
位置測定装置、および位置測定方法
【課題】移動体の絶対位置を簡単に精度高く取得できなかった。
【解決手段】移動体の最新の位置情報を格納しており、移動速度と移動方向を含む移動情報を取得する移動情報取得部と、位置情報と移動情報とを用いて移動体の予測位置情報を取得する予測位置情報取得部と、2以上の衛星からGPS信号を受信するGPS信号受信部と、2以上の衛星ごとにGPS信号を用いて、移動体と各衛星との擬似距離を取得する擬似距離取得部と、2以上の各衛星の擬似距離を用いて新位置情報を算出する新位置情報算出部と、新位置情報と予測位置情報との距離を算出する距離算出部と、距離が第一閾値を超えないか否かを判断する判断部と、第一閾値を超えない場合に新位置情報を最新の位置情報として書き込む位置情報更新部と、各部の処理を繰り返えさせる制御部とを具備する位置測定装置により、絶対位置を簡易な構成で精度高く取得できる。
(もっと読む)
サンプリング機能付きセンサデバイス及びそれを用いたセンサデータ処理システム
【課題】センサデバイス間での測定数比を任意に設定・保持し、その測定数比を維持したまま自律的に測定可能にすること。
【解決手段】複数のセンサデバイス間で測定数比を維持して測定するためのカウント命令をカウントするカウンタ511と、測定数比を所望の測定数比に設定し、複数のセンサデバイスが各自対応するように測定数比の設定値を保持する測定数比保持部512と、カウンタ511のカウンタ値と、測定数比保持部512により保持された測定数比の設定値とを入力し、カウンタ値と設定値との一致後にサンプリングタイミング信号を生成するサンプリングタイミング生成部513と、検知部514で検知された検知信号をサンプリングタイミング生成部513によるサンプリングタイミング信号でサンプリングするサンプリング部515とで構成されている。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
GPS衛星位置算出方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的にGPS衛星の位置検出精度の改善が可能な技術を提供する
【解決手段】GPS衛星位置算出装置10は、GPS衛星から発せられる信号に含まれる軌道速度vと時刻tbとから、基準点の位置Oが信号を受信した時刻trでのGPS衛星の位置Bを算出し、このGPS衛星の位置Bと基準点の位置Oとを結ぶ線分に対する地平線の角度αを算出し(S106)、算出した基準点の位置OからGPS衛星の位置Bまでの距離ctと、取得した高度hと、算出した角度αとに基づき、基準点の位置Oから信号を発信した時刻におけるGPS衛星の位置Aまでの距離csを疑似距離として算出し(S107)、これを用いてGPS衛星の位置Aを算出する(S108)。
(もっと読む)
ジャマー拒否に関するシステム、方法、および装置
【課題】ジャマー環境下でGPS受信機が有効信号を受信できるようにする。
【解決手段】受信された符号を基準信号と相関させ、複数の結果を得る。複数の周波数推定の各々に関するピークのリストを得る。各ピークは、エネルギー結果を有し、符号位相推定に対応する。複数の周波数推定の各々に関するピークから最大ピークを選択する。
(もっと読む)
タイヤ空気圧モニターの故障判別装置及びその故障判別方法
【課題】電波妨害と受信機の故障とを高精度に判別する。
【解決手段】タイヤ内に設けられた送信機と、該送信機が発するタイヤ空気圧情報を含んだ電波を受信する受信機とを含むタイヤ空気圧モニターの故障判別装置である。故障判別装置は、受信機が受信した電波強度を検出し、車両の操舵状態と走行速度を含む走行状況を検出し(S320、S330)、走行状況に基づいて、車両の時間経過による位置を3つ以上算出する(S342)。そして、3つ以上の車両位置で、電波強度検出手段で検出した反比例する車両位置からの距離を各車両位置で求め、その車両位置から電波発信源までの想定距離が等しい等強度範囲を各車両位置で求め、各車両位置での等強度範囲が所定の一致状態となる場合に、その一致状態にある等強度範囲を電波発信源として特定する(S363)。一致状態にある等強度範囲がなく、電波発信源が特定できないときに、受信機3の故障と判別する(S390)。
(もっと読む)
無線通信システムにおいて、デバイスの位置決めに用いられるナビゲーション解を選択すること
【課題】移動局ユニットの位置決めの精度を改善する。
【解決手段】無線通信システムでは、移動局ユニットの位置決めのために異なる種類の位置決め解が使用されうる。この位置決め解は、地上ベースすなわちネットワークベースの技術と、例えば衛星のような非ネットワークベースの技術を含む。移動局ユニットの位置決めを行う際に、異なる位置決め解による装置及び方法が、異なる解の良度示数に基づいて選択される。
(もっと読む)
ロケーションビーコンデータベースおよびサーバ、ロケーションビーコンデータベースを構築する方法、ならびにこれを使用するロケーションベースのサービス
【課題】ロケーションビーコンデータベースおよびサーバ、ロケーションビーコンデータベースを構築する方法、ならびにこれを使用するロケーションベースのサービスの提供。
【解決手段】少なくとも一の車両が、GPS装置およびWi−Fi無線装置を有する少なくとも一つのスキャニング装置と、Wi−Fiアンテナシステムとを備えて展開される。複数のWi−FiアクセスポイントからのWi−Fi信号を検出し、車両のGPS位置情報に関連して検出されたWi−Fiアクセスポイントの認識情報を記録する。Wi−Fi無線装置を備えるユーザ装置を測位することができる。目標エリアにおいて複数のWi−Fiアクセスポイントの算出された位置のリファレンスデータベースが提供される。このデータベースは、先に決定された位置の質を向上するために新しく加えられた位置情報で変更することができ、エラーを起こしやすい情報を避ける。
(もっと読む)
GPS測位演算方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的に測定点での測位精度の改善が可能な技術を提供する。
【解決手段】GPS測位演算装置10は、GPS衛星から発せられる信号に含まれる軌道情報から、信号発信時点でのGPS衛星の、位置Aと、軌道速度vと、時刻tbと、高度hに関する軌道情報を取得し(S105)、軌道速度vと時刻tbとから、測定点が信号を受信した時刻trでのGPS衛星の位置Bを時刻差t=tr−tbから算出し(S106)、GPS衛星の位置Bと測定点の位置Oとを結ぶ第1の線分に対する地平線の第1の角度αを第1の線分の距離ctと高度hから算出し(S107)、第1の線分の距離ctと、第1の角度αと、軌道速度vとに基づき、GPS衛星の位置Aと測定点の位置Oとを結ぶ第2の線分の距離csを算出し(S107)、測位演算を行う(S111)。
(もっと読む)
GPS測位演算方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的に測定点での測位精度の改善が可能な技術を提供する。
【解決手段】GPS衛星21〜23から発せられる信号を受信して測定点の位置測位を行うGPS測位演算方法であって、GPS測位演算装置10は、受信した信号に含まれる航法データから、GPS衛星が信号を発信した時点におけるGPS衛星の、位置Aと、時刻tbと、軌道速度vとを含む軌道情報を取得し(S105)、測定点が信号を受信した時刻trでのGPS衛星の位置Bを時刻差t=tr−tbから算出し(S106)、ここで算出したGPS衛星の位置Bと測定点の位置Oとを結ぶ線分の距離ctを疑似距離として算出して(S107)、測位演算を行う(S111)。
(もっと読む)
測位システム、通信装置、及び測位方法
【課題】測位機能を有する情報処理装置の車載時の自律航法による位置情報の精度を向上させることができる測位システム、通信装置、及び測位方法を提供する。
【解決手段】測位システム10は、車両300に設けられたコネクタ308と嵌合するコネクタ110と、上記コネクタを介して、上記車両から上記車両の車速情報又は進行距離情報を受信する車両通信部102と、上記車両通信部により取得した上記車速情報又は進行距離情報に基づく伝送情報を、情報処理装置に送信する情報処理装置通信部104と、を有する通信装置100と、上記通信装置から上記伝送情報を受信する通信部214と、上記車速情報又は進行距離情報に基づいて現在位置を算出する位置算出部242と、を有する情報処理装置200と、を有する。
(もっと読む)
相対測位装置、および相対測位方法
【課題】端末間の相対位置を精度高く取得できなかった。
【解決手段】GPS信号受信部と、受信SNR等の自端末に関する情報である2以上の衛星ごとの自端末衛星情報群を有する自端末情報群を取得し、自端末情報群のうちの一部または全部の情報を送信し、受信SNR等の他端末に関する情報である2以上の衛星ごとの他端末衛星情報群を有する他端末情報群のうちの一部または全部の情報を受信し、2以上の衛星ごとの自端末衛星情報群のうちの1以上の情報、および2以上の衛星ごとの他端末衛星情報群のうちの1以上の情報を用いて、衛星ごとに相関性が高いか否かを判断する相関性判断部と、相関性が高いと判断された衛星の信号を用いて、相対位置を取得し、出力する相対測位装置により、相関性が高い衛星の情報を用いて、端末間の相対位置を精度高く取得できる。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
101 - 120 / 820
[ Back to top ]