
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
121 - 140 / 820
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星から通知され、その航行衛星に搭載された時計が示す時刻の有効期間を延長する測位支援装置に関し、精度よく安定に航行衛星から正常に受信された衛星時刻の有効期間を大幅に延長することができることを目的とする。
【解決手段】時系列iの順に、航行衛星によって航法データが送信された時刻ti以降における前記航行衛星上の時刻Tiを個別に与え、かつ前記航法データで与えられる予測関数Fpiを蓄積するログ手段と、前記時系列iにおける値が前記時刻Tiの近似値もしくは前記時刻Tiであり、かつ前記時系列iの逆順に先行する所定の数Nの時点において、前記予測関数Fpiに対する偏差が既定の範囲に抑えられ、あるいは最小である予測関数Fpi′で前記予測関数Fpiを補完する補完手段とを備える。
(もっと読む)
測位支援装置

【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、前記自立航法軌跡と地図情報が示す道路の形状とが最も一致する道路を前記車両が走行している道路とみなすマップマッチング処理によって特定される時系列の前記車両の軌跡であるマッチング軌跡を当該マッチング軌跡の信頼度とともに取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記GPS軌跡の信頼度を取得し、前記GPS軌跡と前記マッチング軌跡のうち、より高い信頼度の軌跡を補正目標軌跡とし、前記自立航法軌跡と前記補正目標軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
加速度算出方法、位置算出方法及び加速度算出装置
【課題】移動体の加速度を適切に求めるための新たな手法の提案。
【解決手段】移動体に設置された加速度センサー2が検出したローカル座標系であるBフレームにおける移動体の加速度が、移動体に設置されたジャイロセンサー3の検出結果を用いて、絶対座標系であるNフレームにおける加速度(Nフレーム加速度)に変換される。すなわち、ジャイロセンサー3の検出結果を積分することで移動体の姿勢が算定され、当該算定姿勢を用いた座標変換処理により、Nフレーム加速度が算出される。そして、Nフレーム加速度に内在するバイアス値が、当該加速度を観測値とするカルマンフィルター処理を利用して推定され、当該バイアス値を用いてNフレーム加速度が補正される。
(もっと読む)
測位装置及び測位方法
【課題】アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供する。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
(もっと読む)
位置標定装置、位置標定方法および位置標定プログラム
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
(もっと読む)
現在位置表示装置
【課題】GPS衛星信号に基づいて現在位置を算出するのに必要な演算時間と、現在位置表示装置の加減速状態とを考慮して、現在位置をより適正な位置に表示する。
【解決手段】過去の複数のGPS測位位置における現在位置表示装置の速度変化率を取得する速度変化率取得手段と、過去の複数のGPS測位位置に対する各重み付け係数を記憶する重み付け係数記憶手段と、過去の複数の速度変化率と対応する各重み付け係数とに基づき、最新の前記GPS測位位置における現在位置表示装置の速度変化率を予測速度変化率として算出する予測速度変化率算出手段と、最新のGPS測位位置と予測速度変化率とに基づき、GPS受信機によるGPS測位位置の出力時における現在位置表示装置の位置を推定位置として算出し、地図上の前記推定位置に現在位置マークを表示させる表示制御手段と、を備える。
(もっと読む)
GPS測位システム及び方法
【課題】より精度の高い測位データを得ることが可能なGPS測位システム及び方法を提供する。
【解決手段】複数のGPS受信機G01〜G04によりGPS衛星からのGPS測位データを受信し、信頼度判断部501では各GPS受信機からのそれぞれのGPS測位データの信頼度を判断して最も信頼度の高い測位データを選択する。また、信頼度判断部501によって選択された最も信頼度の高いGPS受信機の測位データを測位位置表示部502で表示する。
(もっと読む)
ナビゲーション装置、位置補正方法
【課題】前回のマップマッチング結果に関わらず、正しいマップマッチング結果を得ることができるナビゲーション装置を提供する。
【解決手段】自車両の前方に分岐道路がある場合、分岐点の手前において、現在走行中の道路に対応するリンクと絶対推定位置21との間の距離を算出し、これを基準オフセットとして設定する。自車両が分岐点を通過すると、絶対推定位置22〜28を所定時間ごとに順次検出し、各絶対推定位置22〜28に対して、基準オフセットに基づいてマップマッチング候補とするリンクをそれぞれ探索する。リンクAが所定時間以上探索された場合、リンクAをマップマッチング対象道路に設定し、絶対推定位置28に対応するマッチング候補位置38を分岐点通過後のマッチング位置とする。
(もっと読む)
列車位置検出装置
【課題】簡単な構成で列車の走行位置を車上で高精度に検出する。
【解決手段】速度発電機3からの信号によるTG位置とGPS受信機4からのGPS位置を比較して列車の位置を検出するとともに、検出した列車の位置を、加速度センサ5から出力する列車の上下振動信号と集音装置6から出力する音響信号の両方の波形特徴を抽出して車上装置2がレール継ぎ目や分岐部等の特異点を通過したときの特異点通過信号により補正して、GPS受信機4の測位精度が変化した場合、あるいは速度発電機3からの信号が車輪の空転や滑走などにより不正確になっても列車位置を補正して高精度に列車位置を検出する。
(もっと読む)
移動体の位置検出方法
【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
自車位置認識システム
【課題】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する際に、その推定自車位置の誤差範囲をできるだけ正確に算定できる技術の提供。
【解決手段】衛星測位と推測航法とに基づいて車両の推定自車位置を算定する自車位置算定部と、推定自車位置を基準として推定自車位置の存在可能範囲を基本誤差範囲として算定する誤差範囲算定部とを備えた自車位置認識システム。車両走行方向を基準方向として当該基準方向に対する誤差の発生方向に偏りを有する方向性誤差要因の1つ又は2つ以上について、誤差の発生量の推定値である推定誤差量を算出する推定誤差量演算部と、方向性誤差要因毎の誤差の発生方向及び推定誤差量に基づいて、前記基本誤差範囲を修正する誤差範囲修正部とを備えている。
(もっと読む)
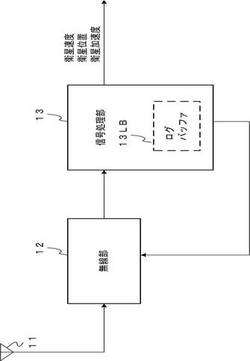
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
位置決定のための方法及び装置
【課題】効率的な位置決定のための方法及び装置を提供する。
【解決手段】この方法及び装置において、1つ又はそれ以上のアプリケーション201、202は、測位方法選択装置204に測位データを要求する。測位方法選択装置は、アプリケーション及び/又はユーザーによって規定される設定に従い、1つ又はそれ以上の測位方法205−209を使用して、このアプリケーションに測位データを提供する。測位方法選択装置204は、アプリケーション201、202から測位要求を受け取り、このアプリケーションによって要求される測位の質を表すパラメータ(1つ又はそれ以上)を形成し、測位方法によって提供される測位データの質をアプリケーションによって要求される測位の質と比較し、測位要求に応答してアプリケーション201、202に測位データを送る。
(もっと読む)
オブジェクトの絶対配置パラメータの決定方法、そのコンピュータプログラムおよび制御設備
【課題】センサによって供給される相対位置パラメータに基づいて、オブジェクトの絶対位置を決定する。
【解決手段】オブジェクトの集合のうちの2つのオブジェクト間の相対配置パラメータをそれぞれ取得するステップ(210;210*)と、受信したそれぞれの相対配置パラメータに相対配置パラメータの信頼性と呼ぶ値を関連付けるステップ(211;211*)と、相対配置パラメータの信頼性に応じて、作業用部分集合を選択するステップ(214;214*)と、作業用部分集合に属するオブジェクトと作業用部分集合外のオブジェクトとの間の新たな相対配置パラメータをそれぞれ決定するステップ(230;230*)と、決定した新たな相対配置パラメータのそれぞれに、作業用部分集合のオブジェクトの相対配置パラメータの信頼性に基づいて計算した信頼性を関連付けるステップ(232;232*)のループ(212;212*)を少なくとも1回実施する。
(もっと読む)
路側通信機及び位置精度推定方法
【課題】車載通信機から送信されて来る位置情報の精度の良否を、路側通信機側で把握できるようにする。
【解決手段】地上からGPS衛星までの距離は路側通信機と車載通信機との距離に比べて非常に長いため、GPS測位精度に関するGPS情報(捕捉数、DOP値等)に関して、車載通信機3と路側通信機2とは同じ条件であると解される。そこで、GPS衛星S1〜S5から送信される信号を路側通信機2が受信してGPS測位精度に関するGPS情報を取得し、取得したGPS情報に基づいて、車載通信機3のアップリンク信号に含まれる位置情報の精度を推定する。
(もっと読む)
多帯域GNSS受信機
【課題】簡単で且つ経済的な構成の多帯域GNSS受信機を提供する。
【解決手段】単一のチップ45と少数の外部構成部分とで構成されているGNSS信号(GPS、Galileo、Glonass)用無線周波数受信機40に、各々が別個の中間周波数段と基底帯域周波数逓降変換器160とを含む一群の独立している信号経路180a−180cがある。外部中間周波数フィルタ110a−110cの選択によって各信号経路が特定の中間周波数帯域に同調されている。中間周波数への変換は共通の局部搬送波発生器102を必要とする。
(もっと読む)
121 - 140 / 820
[ Back to top ]