
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
141 - 160 / 820
位置推定装置及びプログラム
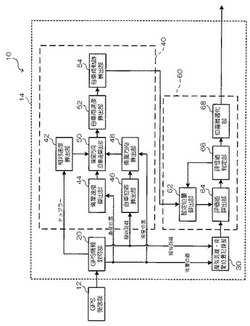
【課題】精度よく移動体の位置を推定する。
【解決手段】車両に搭載される位置推定装置であって、GPS情報取得部20で、複数のGPS衛星の各々から発信された、各々のGPS衛星の軌道情報、GPS擬似距離データ、及びドップラー周波数情報を含むGPS情報を取得し、軌跡推定部40で、取得されたGPS情報に基づいて自車両の速度ベクトルを算出し、算出した速度ベクトルを所定時間分積算して自車両の軌跡を算出する。また、取得したGPS擬似距離データ及びGPS衛星の軌道情報から取得されるGPS衛星の位置座標を擬似距離・衛星位置記憶部に記憶しておく。そして、最適化位置推定部60で、自車両の軌跡上のエポック毎の各GPS衛星との距離と、そのエポックにおける擬似距離との擬似距離差分の全GPS衛星の全エポック数分の和が最小となるように自車両の軌跡を平行移動させて移動体の位置を推定する。
(もっと読む)
無線通信機

【課題】 低コストで、位置情報の信頼性の向上に寄与する。
【解決手段】 位置情報検証部11は、自局及び他局の精度情報に基づいて、距離換算精度を求め、この距離換算精度を通信方式による最大通信距離に加算し、さらに安全のための所定のマージンを加算して、最大通信可能距離を算出し、自局位置情報及び他局位置情報に基づいて、自局他局間距離を算出し、自局他局間距離が最大通信可能距離を越えるか否か判定し、越える場合は、位置情報異常と判定する。
(もっと読む)
測位装置、軌跡情報記憶方法、プログラム
【課題】移動軌跡を示す軌跡データを間引かなくとも移動軌跡を示す軌跡情報を効率よく圧縮して記録できるようにする。
【解決手段】
CPU21は、GPSモジュール3により計測された位置情報を、第1の時間間隔で、移動軌跡を示す軌跡情報としてRAM23に保存する。また、第1の時間間隔で位置情報をRAM23に保存する間、CPU21は、第2の時間間隔で、磁気センサ4及び加速度センサ5の検出値データに基づき、第2の時間が経過する間における現在位置の変動量を示す位置変動情報を取得する。そして、CPU21は、取得した位置変動情報を、移動軌跡を示す軌跡情報としてRAM23に保存する。第2の時間間隔でRAM23に保存する個々の軌跡データのデータ量を削減することにより移動軌跡を示す軌跡情報を効率よく圧縮する。
(もっと読む)
位置検知プログラム、位置検知装置および位置検知方法
【課題】測位誤差によって位置情報の誤測位が発生しても、誤った位置情報に影響されずに正確に移動経路ごとに作業対象となった作業地を検知すること。
【解決手段】位置検知装置100は、連続した位置情報Pを複数個ごとにグループ化し、同一のグループに含まれる位置情報Pが示す作業地の多数派を真の作業地として採用する。そこで、位置検知装置100は、移動経路を誤差幅よりも十分に長くなる距離ごとに分割し(S11)、分割した移動経路に含まれる位置情報Pから作業地候補を特定する(S12)。したがって、グループ1では、位置情報P1〜P6が示す圃場A,Bが、グループBでは、位置情報P7〜P11が示す圃場Aがそれぞれ作業地候補となるため、位置検知装置100は、S12によって特定された作業地候補の中から、多数派となる作業地を作業中の作業地に決定する(S13)。
(もっと読む)
車両位置演算装置
【課題】 一般に電子基準点から移動体までの距離が長くなるに従い測位性能が低下する。移動体が電子基準点をまたぐような広い範囲を計測対象として計測する場合であっても、測位結果の段差表示を少なくして、より精度の高い計測結果を表示する位置計測装置を提供する。
【解決手段】 予め定められたヒステリシス値を記憶する記憶部を備える。車両位置演算装置は、移動体の単独測位位置から複数の基準局の中で予め指定された指定基準局までの距離と、単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離との中から、最も近い距離にある基準局を抽出し、当該基準局を指定基準局に設定し、この指定基準局が有する補正情報とGPS衛星からの観測データとに基づき前記移動体の走行位置を算出する。
(もっと読む)
測位データ評価装置、測位データ評価方法および測位データ評価プログラム
【課題】GPSなどの測位衛星で得られた測位データから計測誤差が大きい測位データを検出できるようにすることを目的とする。
【解決手段】連続解グルーピング部110は各時刻のGPS測位データを連続解毎にグループ分けする。前後解抽出部121は各時刻のGPS測位データから連続解の前後解を抽出する。棄却候補抽出部122は前後解のFIX衛星数に基づいて棄却候補の連続解を判定する。棄却候補提示部130は棄却候補の連続解を利用者に提示する。棄却候補棄却部140は利用者に指定された棄却連続解を棄却する。棄却連続解補完部150は棄却連続解に対応する時間の測位データを補完する。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
衛星ナビゲーション・システムの精度性能を評価するための計算方法と計算システム
【課題】衛星ナビゲーション・システムの精度性能を評価するための計算方法と計算システムを提供する。
【解決手段】本発明は、衛星ナビゲーション・システムの精度性能を評価するために低い確率の事象を計算する方法とシステムに関する。
本発明は、精度性能を評価するためのチャートを併せて用いることで、極値理論の実施に基づいて低い確率の事象をモデル化することにより、高い要求レベルの衛星ナビゲーション・システムの精度性能を保証することを可能にする。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム
【課題】航法の最初から慣性計測装置のデータを高い精度で補正して高い精度で位置を標定できるようにすることを目的とする。
【解決手段】自己位置標定装置100は航法処理を2回行う。1、2回目の航法処理において、IMU処理部140はカルマンフィルタ150により算出されるIMU誤差推定値に基づいて慣性データを補正し、補正した慣性データに基づいて慣性航法により位置、姿勢および速度を算出する。カルマンフィルタ150はGPS処理部120またはODO処理部130により算出される残差に基づいてIMU誤差推定値を算出する。2回目の航法処理において、IMU処理部140は1回目の航法処理においてカルマンフィルタ150により算出されたIMU誤差推定値をIMU誤差推定値の初期値として用いる。IMU処理部140は2回目の航法処理で算出した位置、姿勢および速度を航法結果として出力する。
(もっと読む)
受信装置および周波数偏差計測ユニットおよび測位測距システム
【課題】信号の到達時間差を計測して測位を行うシステムにおいて、高精度な時間差計測を、低消費電力、小型かつ低コストの装置で行う。
【解決手段】本発明は、測位信号を送信する(被測位)ノードと、基準信号を送信する基準局と、上記測位信号および上記基準信号を受信する複数の基地局と、上記複数の基地局とネットワークでつながったサーバと、を有するシステムにおいて、上記複数の基地局が、クロック信号と、該クロック信号をシフトさせる信号とを用いて、上記測位信号と上記基準信号とを受信した時間差および上記基準局との周波数偏差を計測し、上記計測時間差および上記周波数偏差をもとに、上記サーバが上記ノードの位置を算出することを特徴とする。
(もっと読む)
制約された領域における、擬似衛星による位置決定用の自律システム及び適用方法
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
(もっと読む)
補助されたモードにおいて動作する擬似衛星を用いた位置決定システム
位置推定装置
【課題】GPS測位精度を向上させるためのリファレンスとなる基地局の設置をせずに、三角測量による位置決めに用いる距離計測が不安定な場所での測位精度を向上させることが課題である。
【解決手段】GPSやその他の三角測量を用いて移動体の位置を推定する装置において、他の移動体やセンタ等と通信手段により、自信からはまだ得られていない距離計測情報を取得する。また、他の移動体までの相対位置を距離計測手段により計測する。相対位置が計測された移動体間の相対距離を、まだ得られていない距離計測情報に適切な変換をかけて付与することにより、測位計算に最低限必要な3点からの距離情報が得られたと同等の連立方程式を解くことで距離計測が不安定な場所でも測位可能となる。
(もっと読む)
現在位置特定装置およびプログラム
【課題】GPS受信機を位置検出のための他の装置と併用する環境において、GPS受信機の消費電力低減を実現する新規な技術を提供する。
【解決手段】車両用ナビゲーション装置は、自律航法用のための信号を出力するセンサから出力される信号の値と車両の現在位置との間の関係式を用いて、センサが出力された信号に応じた前記車両の現在位置を算出し、また、GPS受信部が出力した信号に基づいて、間欠的に、前記関係式を補正する。また、車両用ナビゲーション装置は、関係式を補正したことに起因して(ステップ130)、GPSアンテナおよびGPS受信部への電力供給を一時的に停止させ(ステップ145)、その後、復帰条件が満たされたことに起因して、停止している前記電力供給を再開させる。
(もっと読む)
測位装置及びプログラム
【課題】簡易な方法でマルチパスの影響を考慮した信頼性の高い測位結果を得る。
【解決手段】測位演算部26で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数に基づいて、受信位置の位置座標及び速度を演算する。建物高情報取得部30で、建物高情報記憶部28に記憶された緯度及び経度に対応した建物高情報から、演算された位置座標に対応した受信位置周辺の建物高情報を取得する。観測誤差算出部34で、GPS受信機12から出力された衛星仰角、取得された建物高情報、演算された位置座標及び速度に基づいて、擬似距離誤差及びドップラーシフト誤差を算出し、誤差補正測位演算部36で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数、並びに観測誤差算出部34によって算出された擬似距離誤差及びドップラーシフト誤差に基づいて、誤差を補正した受信位置の位置座標及び速度を演算する。
(もっと読む)
無線位置検出システムと無線位置検出方法
【課題】現場での調整・設置に要する工数を低減し、調整・設置後のレイアウト変更等にも柔軟に適用でき管理対象の無線タグの位置を高い精度で推定可能とする。
【解決手段】監視エリアにおける特定の位置に分散して配置された複数の親機及び基準となる複数の第1無線タグ、移動体に取り付けられ第2無線タグ、複数の親機に対して無線信号の授受を行う無線制御装置、データ処理装置を有する。データ処理装置は、無線制御装置を制御して各親機に対する第1無線タグの第1受信電界強度データと、各親機に対する第2無線タグの第2受信電界強度データを取得し、第2受信電界強度データのうち大きい順の所定データとそれに対応する親機に関する第1無線タグの第1受信電界強度データを参照して、該当する親機と基準となる複数の第1無線タグとの位置情報とから第2無線タグの位置を推定する。
(もっと読む)
現在位置表示装置
【課題】GPS信号を再度受信した際に、GPS信号に基づく現在位置と、表示位置とが離れている場合に、スムーズにその誤差を解消して表示する。
【解決手段】GPS受信手段に基づいて現在位置を算出し、現在位置マークを表示する現在位置表示装置において、前記現在位置表示装置は、前記GPS受信手段によりGPS信号が受信できなくなった後、再度前記GPS信号が受信されると前記現在位置算出手段により前記再度GPS信号が受信された現在位置が算出され、該算出された現在位置と前記現在位置マークの位置とが所定距離以上離れているか否かを判定する位置比較手段を備え、前記表示位置決定手段は、前記位置比較手段が所定距離以上離れていると判定した場合、前記現在位置マークの位置を前記現在位置算出手段により算出された現在位置に段階的に近づくように移動させる。
(もっと読む)
位置測定装置および位置測定方法
【課題】 受信信号の帯域幅に影響されることなく、かつ回路規模の削減が可能で、さらに異なる発射源からの電波に対しても、それぞれの発射源位置を分離して測定することが可能な位置測定装置の提供。
【解決手段】 位置測定装置は、移動しながら電波発射源からの電波を受信する2つの移動体受信部1a,1bと、2つの移動体受信部1a,1bで受信される信号を取得してその周波数差を算出し、その周波数差の時間的変化から電波発射源の位置を測定する発射源位置測定部10とを含む。
(もっと読む)
衛星信号受信機
【課題】
移動体におけるトンネル等による長期信号遮蔽に伴う誤捕捉、誤追尾及びそれに伴う異常測位を防止する。
【解決手段】
サーチ回路で捕捉した捕捉情報を信号レベルと共に一時記憶する捕捉情報記憶器と、捕捉情報記憶器の情報を初期値として追尾回路に渡すかどうかを判定する追尾移行判定器と、誤追尾の場合には追尾移行判定器に、サーチ信号での追尾やり直しを指示する追尾状況判定器と、トンネル等全衛星長時間中断時において、捕捉情報記憶器からのサーチ信号レベルと予め定めた閾値との比較により、自己相関による誤捕捉の可能性があるかを判定し、誤捕捉の可能性があると判定した場合には、サーチ周波数リセット指示を出力するサーチ回路リセット時期判定器と、サーチ周波数リセット指示がなされた場合に、全サーチ回路に対し、サーチ周波数を初期値にリセットする全サーチ回路リセット回路を備える。
(もっと読む)
141 - 160 / 820
[ Back to top ]