
Fターム[5J062BB02]の内容
Fターム[5J062BB02]に分類される特許
41 - 60 / 131
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
GNSS受信装置及び測位方法

【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、指向性を有し、該指向性を異なる方向に向けて配置される複数のアンテナと、各アンテナにより受信された同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、該擬似距離計算部により求められた各擬似距離の差分を求める擬似距離差分計算部と、該擬似距離差分計算部により求められた差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、該判定部により、マルチパスの影響を受けていると判定された擬似距離に対する重み付けを変更し、測位演算を行う測位演算部とを有する。
(もっと読む)
無人ボート自動観測システムおよび無人ボート自動観測方法
【課題】観測航路を自動的に生成しその観測航路下の水中または水底の様子を自動的に観測できるようにする。
【解決手段】観測航路を生成するために基準観測線を入力し(S1)、前記基準観測線を一定の距離平行移動させることによって複数の観測航路を生成し(S2)、生成された複数の観測航路の距離を確定させると同時に確定させた観測航路の航行順序を指示し(S3)、指示された航行順序にしたがって無人ボートを航行させ(S4)、航行中に少なくとも水中または水底の様子のいずれかを観測し(S5)、観測されている少なくとも水中または水底の様子を表示するとともに記憶させる(S6)。
(もっと読む)
移動体位置測位装置
【課題】移動体の測位をより継続的且つ正確に行なうこと。
【解決手段】複数の衛星からの信号を受信する受信手段により受信された信号を観測して得られる複数の観測データの一部又は全部を選択する観測データ選択手段と、観測データ選択手段により選択された観測データに基づいて測位演算を行なう測位演算手段とを備える移動体位置測位装置であって、観測データ選択手段は、複数の観測データのそれぞれに対応する複数の誤差推定値を算出し、算出した複数の誤差推定値から、最大値と最小値の差が所定値未満であり個数が所定個数以上の誤差推定値群を抽出し、抽出した誤差推定値群のうち最も標準偏差の小さい誤差推定値群に含まれる誤差推定値に対応する衛星からの信号による観測データを選択することを特徴とする。
(もっと読む)
移動体位置測位装置
【課題】より確実且つ高精度に移動体の位置を測位すること。
【解決手段】複数の衛星からの信号を受信する受信手段と、該受信手段により受信された信号に基づき観測疑似距離を算出する観測疑似距離算出手段と、該観測疑似距離算出手段により算出された観測疑似距離に基づき、繰り返し測位演算を行なう測位演算手段と、を備える移動体位置測位装置であって、前記測位演算手段が繰り返し測位演算を行なう中で前回に測位された測位結果と衛星位置から求められる距離に、ADR(Accumulated Doppler Range)の変化量を加算して推定疑似距離を算出する推定疑似距離算出手段を備え、前記測位演算手段は、所定の場合に、前記観測疑似距離算出手段により算出された観測疑似距離に代えて前記推定疑似距離算出手段が算出した推定疑似距離を用いて測位演算を行なうことを特徴とする、移動体位置測位装置。
(もっと読む)
移動体用測位装置
【課題】高度が変化する環境下においても精度良く2次元測位を行うことができる移動体用測位装置の提供。
【解決手段】衛星からの衛星電波を移動体で受信して、該移動体の位置を測位する移動体用測位装置において、移動体の姿勢に応じて変化する座標系であって、該移動体を基準とした直交座標系を定義する座標系定義手段と、前記座標系定義手段により定義された直交座標系を用いて、3個の衛星を用いた2次元測位により前記直交座標系における移動体の位置を演算する2次元測位手段とを備えることを特徴とする。
(もっと読む)
測位装置
【課題】移動する電波源に対しても高精度の測位を可能にする測位装置を提供する。
【解決手段】2機以上の衛星3,4を経由して複数の受信局5,6で受信される未知の電波源1,2からの信号間のTDOAとFDOAを用いて前記電波源の位置を推定する測位装置であって、測位装置の信号・情報処理装置7が、TDOAとFDOAを複数回計測するとともに、電波源が等速直線運動するものと仮定し、電波源の初期位置と速度を未知変数とする、前記TDOAとFDOAに関する方程式を前記TDOAとFDOAの複数回の計測結果に従って解き、前記電波源の初期位置と速度を算出する。
(もっと読む)
音響計測用観測船及び音響計測システム
【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
併合衛星システム信号を使用するナビゲーションのための衛星受信機および方法
ナビゲーションのための全地球的航法衛星システム(GNSS)受信機の実施形態および方法を一般的にここで説明する。幾つかの実施形態では、GNSS受信機は複数の各チャンネル帯域内で2以上の信号測定を行うことにより持続的な干渉を有するチャンネルからクリアチャンネルを体系的に識別するための信号処理回路を含んでいる。チャンネル帯域はGPS衛星、GALILEOシステム衛星またはGLONASSシステム衛星のような少なくとも2以上の異なる全地球測位衛星システムの少なくともチャンネル帯域を含んでいる。幾つかの実施形態ではGNSS受信機は衛星ナビゲーションシステムでの自己適用のジャミング回避を行う。 (もっと読む)
相対位置検知装置、及び相対位置検知システム
【課題】3台以上の移動体間の相対位置を干渉測位によって求めると共に、干渉測位に関する信頼性判定を効率的に行なうこと。
【解決手段】自己が搭載された移動体を含む3台以上の移動体が互いに通信可能な所定の場面において、基準移動体である場合には観測データ取得手段により取得された観測データを含むデータを非基準移動体に送信し、非基準移動体である場合には観測データ取得手段により取得された観測データ及び基準移動体から受信した観測データを含むデータを用いた干渉測位を行なって基準移動体との相対位置を算出すると共に、干渉測位の結果として算出される整数値バイアスを含むデータを他の非基準移動体に送信して干渉測位に関する信頼性判定結果を受信する処理と、他の非基準移動体から整数値バイアスを含むデータを受信して干渉測位に関する信頼性判定を行なう処理とのいずれか一方を行なう。
(もっと読む)
移動体用測位装置
【課題】擬似距離の誤差の大きい場合でも精度の良い測位演算を行う。
【解決手段】擬似距離を算出するPSR算出手段と、ADRを算出するADR算出手段と、擬似距離に基づいて移動体の位置を測位する測位手段と、衛星位置を算出する衛星位置算出手段と、前回周期における移動体の位置の測位結果と、前回周期における衛星位置の算出結果との差分ベクトルの大きさに基づいて、前回周期における擬似距離の推定値を算出する前回値PSR推定手段と、推定前回値に、前回周期と今回周期において算出された各ADRの差を足し合わせて、今回周期における擬似距離の推定値を算出するPSR推定手段と、擬似距離の誤差が所定許容範囲を超えたか否かを判定するPSR誤差判定手段とを備え、測位手段は、今回周期において擬似距離の誤差が所定許容範囲を超えたと判定された場合に、該擬似距離に代えて、推定擬似距離に基づいて、今回周期における移動体の位置を測位する。
(もっと読む)
航行体の姿勢検出方法及び装置
【課題】2つのアンテナで航行体の姿勢を求める。
【解決手段】第1アンテナa1及び第2アンテナa2を離間して航行体1に搭載し、複数の測位用衛星S1,S2から発信された電波の各々について、第1アンテナa1及び第2アンテナa2に届く電波の位相差を算出し、各位相差から、複数の測位用衛星S1,S2と、第1アンテナa1と第2アンテナa2を結ぶ線分とがなす角をそれぞれの姿勢角として算出し、求めた複数の姿勢角θ1,θ2を合成することにより航行体1の姿勢を求める。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる擬似距離の測定精度を考慮した重み付きDOPを算出すること。
【解決手段】本発明は、観測可能な複数の衛星10からの信号に基づいて移動体90の位置を測位する測位手段40A,40B,40Cを備える移動体測位装置1,2,3において、衛星からの信号に含まれうるノイズ量を衛星毎に推定するノイズ量推定手段70と、前記ノイズ量推定手段により推定された衛星毎のノイズ量に基づいて重み行列Rを作成し、該作成した重み行列を用いて、DOP(dilution of precision)に重み付けを行うことで、重み付きDOP(WDOP)を算出する重み付きDOP算出手段とを備えることを特徴とする。
(もっと読む)
車両測位システムおよびナビゲーション装置
【課題】より高い利便性、且つ、より高い汎用性を有しながら、初期測位時間を短縮することが可能な車両測位システムおよびナビゲーション装置を提供する。
【解決手段】車両3を輸送する輸送機器2に搭載され、輸送機器2の現在位置を検出する輸送機器位置検出装置10と、輸送機器2に搭載され、輸送機器位置検出装置10によって検出された輸送機器位置の情報を送信する近距離無線通信装置20と、を含むとともに、ナビゲーション装置30は、輸送機器2に搭載されている近距離無線通信装置20からの輸送機器位置の情報を受信する送受信機42と、送受信機42によって輸送機器位置の情報が受信されたことに基づいて、現在位置を輸送機器位置の情報が示す位置に補正する制御装置38と、を含む。
(もっと読む)
初期位置補正機能を有する単独GPS測位による移動局の走行軌跡計測装置
【課題】基準局を不要としてコストを低く抑え、移動局の走行軌跡を地図上に重ね合わせて表示できる移動局の走行軌跡計測装置を提供することである。
【解決手段】移動局の走行軌跡計測装置は、自動車12や船舶等のようなビークルに搭載され、GPS衛星群10から発信されるGPS信号等に基づいてビークルの走行軌跡を計測する移動局14を備える。さらに、地上の所定位置を基準として、走行中のビークルが初期位置ラインLを通過する際に、当該ビークルとの距離Wを計測する距離計測手段24と、距離計測手段24によって計測された距離Wに基づいて初期位置ラインLを通過する際におけるビークルの位置を特定し、特定した位置に基づいて移動局14によって計測した走行軌跡の計測開始位置を補正する位置補正手段28とを有する。計測開始位置を補正するので、ビークルの走行軌跡を地図上に重ね合わせて表示できる。
(もっと読む)
移動体用測位装置
【課題】航法メッセージの暦データと精密暦の予報データとを適切に組み合わせて用いることで移動体の位置等を精度良く測位すること。
【解決手段】本発明の移動体用測位装置は、航法メッセージの暦データを受信する手段と、精密暦の予報データを受信する手段と、前記暦データと前記精密暦の予報データの双方を用いて衛星位置を算出する衛星位置算出手段と、前記算出された衛星位置に基づいて、移動体の位置又は速度を測位する測位手段とを備え、前記衛星位置算出手段は、前記暦データ及び前記精密暦のうちの少なくとも一方のデータの鮮度に基づいて、該鮮度に応じた重みにより前記暦データと前記精密暦の予報データを加重平均して用いることを特徴とする。
(もっと読む)
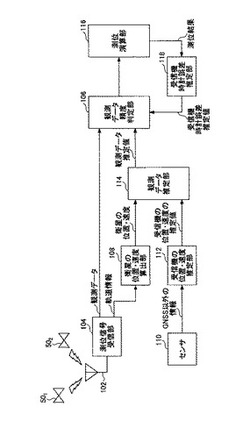
衛星測位用受信装置
【課題】複数の搬送波周波数の測位信号を受信処理可能で、耐ノイズ性能が高く、IC化が容易で、小型化、省電力化、低コスト化を実現する衛星測位用受信装置を提供する。
【解決手段】アンテナ2は、異なる搬送波周波数の衛星測位用の測位信号として、例えば、GPSのL1信号とL5信号とを受信する。受信装置100は、受信した測位信号を2系統の受信処理系で受信処理する。受信装置100は、受信した異なる搬送波周波数の測位信号を、位相器112、132、ミキサ114、134および複素フィルタ116、136により1段で中間周波数に変換する。分周器160、162の分周比は、各受信処理系の搬送波周波数に応じて設定される。分周器150、160、162、164の分周比を変更することにより、GPSのL1およびL5以外にも、L1およびL2を受信処理することも可能である。
(もっと読む)
ロケーションデバイス
ロケーションデバイス(10)は、好ましくは、衛星信号を受信するグローバルポジショニングデバイスである、ロケーション検出および処理モジュール(12)を具備する。モジュールは、デジタルでエンコードされた信号の形態で、ポジションデータを、起動デバイス(16)に結合されている制御プロセッサ(14)に出力する。プロセッサ(14)は、プロセッサ(12)から受け取った信号をさらに処理して、シンセサイザーが認識して、緯度および経度に関してデバイス(10)のポジションを表す音声データ信号に変換できる形態で、信号を音声シンセサイザー(20)に提供する。シンセサイザーはその信号を送信機(22)に送り、送信機は無線音声信号としてその信号を送信する。制御プロセッサは、中央機関への直接送信のために、デジタルでエンコードされた音声データを送信機(22)または送信機(23)に送ってもよい。 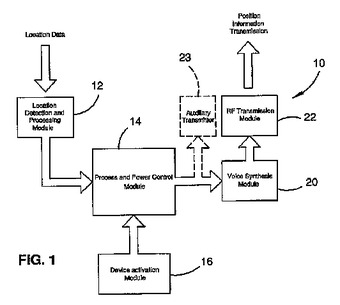 (もっと読む)
(もっと読む)
飛翔体に備えられる位置情報検出装置
【課題】山岳や海上など、携帯電話端末等の携帯端末が通常の通信のできない圏外域において、当該携帯端末の位置を検出することを可能とする飛翔体に備えられる位置情報検出装置を提供する。
【解決手段】飛翔体1の位置情報検出装置2aにおいて、電波受信部2−1は、携帯電話端末から送信される電波を受信する。固有情報検出部2−2は、受信した電波に含まれる固有情報、例えば、電話番号を読み出す。携帯電話端末位置情報検出部2−3は、受信した電波に基づいて、携帯電話端末の位置情報を検出する。通信部2−5は、電話番号と、位置情報とを送信する。
(もっと読む)
41 - 60 / 131
[ Back to top ]