
Fターム[5J062BB02]の内容
Fターム[5J062BB02]に分類される特許
81 - 100 / 131
移動体位置測位装置
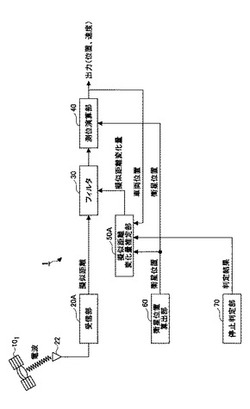
【課題】移動体が停止している状況下で、衛星信号の搬送波位相の計測結果を用いずに別の手段により擬似距離変化量を推定して、擬似距離のフィルタリングを可能とする。
【解決手段】本発明による移動体位置測位装置1,2,3は、衛星10と車両90の間の擬似距離ρ’を算出する擬似距離算出手段20A,20Bと、移動体が停止したか否かを判定する停止判定手段70と、衛星の位置を算出する衛星位置算出手段60と、擬似距離変化量Δρを推定する擬似距離変化量推定手段50A,50B,50Cと、擬似距離と擬似距離変化量とに基づいて、移動体の位置を測位する測位手段40とを備え、前記擬似距離変化量推定手段は、前記停止判定手段により移動体の停止が判定された場合に、前記衛星位置算出手段により算出される衛星の位置の変化履歴を用いて、前記擬似距離変化量を推定する。
(もっと読む)
移動体位置測位装置

【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
海上レスキュー位置の記録システム
【課題】グローバル・ポジショニング・システム(Global Positioning System、GPS)を使用せず、無線伝送の方式で各ステーションのデータバックを伝送や記録する海上レスキュー位置の記録システムを提供する。
【解決手段】グローバル・ポジショニング・システム(GPS)を使用せず、多重ジャンプモジュール式無線伝送を使用し、デジタル通信ネットワークを通じて少なくとも一つの固定ステーションと複数の可動ステーションとの間に信号を伝送すると共に、信号を含むパケットを記録し、該パケットは、各可動ステーションのデータベースに暫く記録され、該可動ステーションの信号伝送範囲に他の可動ステーションが存在すれば、パケットの伝送や記録を行い、該システムは少なくとも1つの固定ステーションと複数の可動ステーションを有することを特徴とする。
(もっと読む)
アレイアンテナシステム
【課題】特定の場所に設置しなくても、電波の到来する方位および仰角を推定することができるアレイアンテナシステムを提供する。
【解決手段】信号処理装置2は、アンテナ群1に属する互いに独立して移動可能な複数のアンテナ部1a〜1nで受信した電波に輻輳された複数の信号を独立成分分析の手法を用いて分離し、分離された複数の信号の各々についての各アンテナ部1a〜1nにおける位相差を算出し、衛星信号を用いた各アンテナ部1a〜1nの測位結果により各アンテナ部1a〜1nの位置関係を算出し、この算出した位相差および位置関係を用いて、電波の到来方位および仰角を算出する。
(もっと読む)
軟弱水中地盤上の盛土の監視方法および装置
【課題】水中の軟弱地盤上に造成している盛土の安定性を容易に精度よく把握できるようにした軟弱水中地盤上の盛土の監視方法および装置を提供する。
【解決手段】軟弱水中地盤11上に造成している盛土10の頂部の沈下量Sを測定するとともに、盛土10の水中の法尻部に配置した検知指標体6をGPS受信機を備えた作業船2からナローマルチビーム測探機3により検知して盛土10の法尻部の水平方向変位量Hを測定し、測定した頂部の沈下量Sおよび法尻部の水平方向変位量Hに基づいて制御装置によって盛土10の安定性を判断するデータを演算して、予め入力してある基準データと対比する。
(もっと読む)
移動体用衛星電波受信機
【課題】マルチパスが発生したか否かを精度良く検出すること。
【解決手段】本発明に係る移動体用衛星電波受信機は、実測ないし推定に基づいて導出される範囲であって、マルチパスが無い状況下での相関ピーク値PCAの取りうる範囲を、第1閾値範囲として設定すると共に、実測ないし推定に基づいて導出される範囲であって、同状況下での擬似雑音コードのコード位相に対するレプリカ擬似雑音コードのコード位相の位相ずれ量Δφの取りうる範囲を、第2閾値範囲として設定する閾値範囲設定手段140と、受信した衛星信号に対して算出された前記相関ピーク値と前記コード位相のずれ量が、前記閾値範囲設定手段で設定された第1閾値範囲及び第2閾値範囲内にそれぞれあるか否かを判定する判定手段142と、前記算出された前記相関ピーク値と前記コード位相のずれ量の少なくともいずれかがそれぞれの閾値範囲内に無いと判定された場合に、マルチパスが発生したと判断するマルチパス検出手段144と、を備える
(もっと読む)
干渉および電波妨害に対する感受性を低減したナビゲーションシステムのための方法および装置
ナビゲーションシステムは、GPSへのあらゆる形の干渉または電波妨害に対する著しいレベルの保護を、コスト効率のよい方法で提供する。このシステムは、GPSと組合せた地上基準局および地球低軌道(LEO)衛星のネットワークを採用する。基準局とユーザとをリンクする、GPS衛星への共通視野測距ジオメトリが、設定される。同じ対の基準局とユーザとの間のLEO衛星への第2の共通視野ジオメトリも設定される。地上局は、GPS、LEO衛星の信号の搬送波位相測定を行なうことにより、リアルタイムの支援信号を合成する。この支援情報はLEO衛星を介して、周囲の電波妨害を貫通するように高出力でユーザ受信機に送信される。ユーザ受信機は、LEO衛星の搬送波位相を追尾し、支援情報を復調して、次に、GPS信号の拡張された一貫した測定を可能にするように搬送波位相測定値および支援情報を適用する。このシステムはそれにより、電波妨害で失われたであろうGPS信号を復元させる。 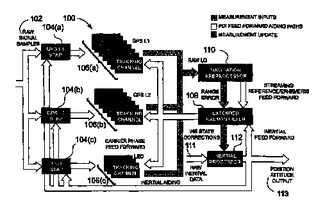 (もっと読む)
(もっと読む)
移動体姿勢計測装置
【課題】従来に比べて移動体の姿勢の計算が簡易なものとし、また、移動体の姿勢の算出値の精度を向上させる。
【解決手段】移動体に設けられて衛星の信号を受信する基準アンテナ11及びn個(1,2,3,…)のユーザアンテナ12で受信した衛星の信号から前動体と前記衛星との位置関係を算出する。また、各アンテナで受信した衛星信号の搬送波位相を測定する。そして、この搬送波位相から一重位相差又は二重位相差を計算する。基準アンテナとユーザアンテナとの位置関係、移動体と衛星との位置関係、及び一重位相差又は二重位相差の関係に基づいて、一重位相差又は二重位相差に対する未知の整数値アンビギュイティ、移動体の未知の姿勢成分、及び一重位相差又は二重位相差についての初期値を算出する。非線形推定法を利用して初期値を収束させることにより、未知の整数値アンビギュイティ及び移動体の未知の姿勢成分を算出する。
(もっと読む)
パッシブレーダ装置
【課題】各パッシブセンサと処理装置との間におけるデータ量を削減してセンサの小型軽量化およびシステムの秘匿性を確保し、かつ各センサの位置変更等にかかわらず所望の方位について正確な処理データを得る。
【解決手段】各パッシブセンサは、自己位置を取得する位置情報取得手段、自己位置と他センサの位置情報から自己の絶対方位を算出する絶対方位算出手段、処理装置側が指示した観測方位と自己の絶対方位に基づいて特定方位の受信信号のみの選択を制御する受信制御手段、無指向性受信空中線で取得した受信信号の中から選択した特定方位の信号のみを自己位置、絶対方位と共に処理データとして送る探索データを生成する受信手段を備え、処理装置は、各センサからの処理データに基づいて目標の検出、測位を行う信号処理手段、目標の追尾処理を行うデータ処理手段を備える。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 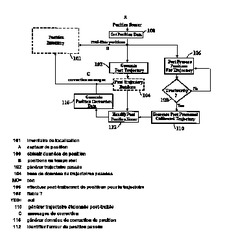 (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
測量スティッチングを用いる位置測定方法
モバイル通信デバイスは、異なる出来事の間に取得されてもよい衛星輸送手段のような複数の参照基地局および/または基地局からの測量値を用いて初期設定されるカルマンフィルターのような測位フィルターを含む位置決定に関する方法を用いる。したがって、当該測位フィルターは、同じ測量の出来事の間の少なくとも3つの異なる信号の第1の取得を必要することなく、位置の推定値に関して用いられてもよい。 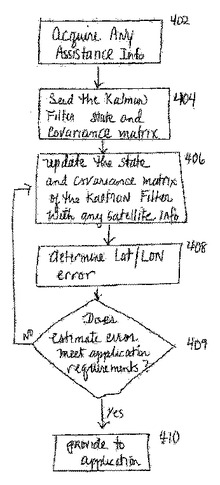 (もっと読む)
(もっと読む)
姿勢算出装置、および、姿勢算出方法
【課題】予備のGPSを含めた3台以上のGPS受信機を有し、各々のGPS受信機のアンテナから位置情報を受信し、受信した位置情報から物体の姿勢を算出する姿勢算出装置で、高精度の姿勢算出をおこなう。
【解決手段】3台以上のGPS受信機から姿勢を算出するGPS受信機の組合せを、予め固定で決めることなく、GPS受信機のアンテナ間の基線長が長い組合せを常時監視する。そして、各々のGPS受信機の組合せからアンテナ間の基線長が最も長い2台のGPS受信機を選択し、その2台から出力される情報情報を姿勢算出に用いる。
(もっと読む)
エリア判定装置及びその判定方法
【課題】 複数のエリアが重なり合う場合であっても、簡素な方法でエリアに対する進入あるいは退出を判定することが可能なエリア判定装置及びその判定方法を提供する。
【解決手段】 所定範囲に設定される複数のエリアに対する移動体の進入あるいは退出を判定するエリア判定装置である。過去の内外判定演算が真となるエリアを要素とする第一の集合を算出し、現在の内外判定演算が真となるエリアを要素とする第二の集合を算出し、前記第二の集合を全集合とする前記第一の集合の補集合に属する要素となるエリアに対して前記移動体が進入したと判定し、前記第一の集合を全集合とする前記第二の集合の補集合に属する要素となるエリアに対して前記移動体が退出したと判定する制御手段4を備えてなる。
(もっと読む)
位置・姿勢推定装置
【課題】本発明の課題は、複数アンテナを使用するGNSS位置・姿勢推定装置において、装置を複雑化することなく、マルチパス誤差を軽減することにより、姿勢推定精度および位置推定精度を向上させることにある。
【解決手段】本発明の姿勢推定装置は、移動体上に複数のアンテナを搭載し、各アンテナで取得したGNSS衛星信号と装置内部で生成したレプリカ信号の相関をとる相関器において、姿勢角情報を用いて次式で計算した搬送波位相差を拘束条件として課する機能を備え、更に、従来のGNSS姿勢推定装置の機能により得られた姿勢角を初期値とし、前記の拘束条件を有する相関器を用いることにより搬送波位相のマルチパス誤差を軽減し、各アンテナにおける搬送波位相を推定して姿勢角を再度計算する手段を備えるようにした。
(もっと読む)
測位装置
【課題】受信機の簡易な構成によりマルチパスフェーディング環境下におけるマルチパス信号を排除し、安定した直接波信号の信号強度を確保した高い測位精度および高い利用性を有する測位装置を提供する。
【解決手段】初期捕捉モード後の追跡モードにおいて、複数のアンテナAnt0,Ant1,・・・,Antnの内、例えばアンテナAnt0を基準アンテナAnt0とし、基準アンテナAnt0に対する送信機の位置情報ならびに基準アンテナAnt0に対する他のアンテナAntkの位置情報に基づいて、基準アンテナAnt0で受信される直接波信号と他のアンテナAntk(k=1,・・・,N)で受信される直接波信号との遅延距離Lkに対応する搬送波の位相差φkを、φk=2π*dk/λ*cos(E−θ)として求め、そのφk(k=1,・・・,N)をアンテナ毎に生成される搬送波についてのレプリカ信号に課し、そのレプリカ信号と各アンテナで受信される受信信号との相関をとることにより、直接波信号の信号強度を増幅する。
(もっと読む)
複数の方位線からの物体の位置特定の方法及び装置
物体の場所を求める方法は、複数の観測場所からの物体の方位を表すデータを使用する。この方法は、(a)方位毎に、手順を使用して点の座標を導出することであって、この座標は、所定の場所とその方位線上の最も近い点との間の符号付き距離を表す第1の値pと、その方位線の角度を表す第2の値θとを含み、上記手順に従って、反対方向の同一直線上の方位が、互いに符号が反対である第1の値と、互いにπだけ異なる第2の値とを有する、導出すること、及び、(b)上記点を曲線フィッティングすることを規定するパラメータを導出することであって、当該パラメータは物体の場所を表す、導出することを含む。方位測定に関連付けられる信号対雑音比を表す値と、互いに対して相対的な観測場所を表す値及び物体に対して相対的な観測場所を表す値とを使用して、物体の場所の計算に対するそれらの影響を重み付けする目的で方位をグループ化することができる。  (もっと読む)
(もっと読む)
GPS受信装置
【課題】自車位置の検出に要する時間を短縮することができるGPS受信装置を提供する。
【解決手段】複数の人工衛星から送信されるGPS信号を受信し、該GPS信号の測位情報より位置を算出するGPS受信装置に、所定の移動体から送信された情報を受信する受信手段と、前記情報から求められた位置を基準位置として初期サーチを行い、現在位置を特定する測位手段とを備えることにより達成される。
(もっと読む)
スペクトラム拡散パイロットを備えたGPS変換器
【課題】信頼があり、適用した場合に物体あるいは人物に対して隠蔽するに十分に小さくすることができ、かつ、敵対する人物あるいは軍隊の妨害を困難にする簡単で高価でない変換器を提供すること。
【解決手段】一つの位置で受信されたGPS信号を別の位置への地上波伝送のために異なる周波数に変換するための装置は、地上波送信器の局部発振器(56)を地上波受信器の局部発振器に位相ロックするためにスペクトラムパイロットトーンを使用する。これにより、安全性が増加し、他の方法では使用できない周波数スペクトラムの使用が可能となり、小さいコヒーレンス帯域幅でパイロットトーンとGPS信号のコヒーレンスが許容され、同じ中央周波数で変換後のGPS信号とパイロットトーンの干渉のない伝送を行うことができる。
(もっと読む)
最小限のオンボード処理による航法システム
【課題】
位置評価を与える航法システムを提供する。
【解決手段】
1つの実施例において、方法は3次元各々で加速度評価を積分することを含む。各次元の速度雑音エラーを決定するために、各次元の積分加速度評価から、各次元のGPS速度を減算する。各次元で速度雑音エラーをフィルタする。各次元の速度評価を得るために、各次元の積分加速度評価にフィルタした速度雑音エラーを加算する。各次元の積分速度評価を決定するために、各次元の速度評価を積分する。各次元の位置雑音エラーを決定するために、各次元の積分速度評価から、各次元のGPS位置を減算する。各次元の位置雑音エラーをフィルタし、各次元のフィルタされた位置雑音エラーを積分速度評価へ加算して、各次元の位置評価を得る。
(もっと読む)
81 - 100 / 131
[ Back to top ]