
Fターム[5J062BB02]の内容
Fターム[5J062BB02]に分類される特許
121 - 131 / 131
位置測定システムおよびそれを備えた操船支援システム
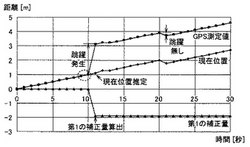
【課題】 構成が簡素で、かつ、安価な位置測定システムおよびそれを備えた操船支援システムを提供する。
【解決手段】 GPS測定値の更新前後における変化量が跳躍判定量を超えると、制御部は、跳躍と判断する。そして、制御部は、その跳躍が発生した時点から1サンプル前と2サンプル前との距離差から移動速度を導出し、その移動速度を維持するものとして、跳躍発生時における現在位置を推定する。同時に、制御部は、跳躍発生時の現在位置を示す値とGPS測定値との差を第1の補正値とする。さらに、制御部は、跳躍発生以降のGPS測定値に対して、演算された第1の補正値を用いて補正を行い、現在位置を算出する。
その後、跳躍が再度生じた場合には、制御部は、第1の補正量を再度算出し、同様の補正を行う。
(もっと読む)
船舶運航監視システム

【課題】 AIS機器で一度に運航監視できる船舶数を大幅に増やすことができ、AIS搭載船及びAIS非搭載船で、安価な機器でAIS搭載船とAIS非搭載船を一元的に監視でき、運航安全性を高めることができ、海岸から遠隔の場所で、遠隔かつ広域の地域の船舶を、リアルタイムにモニタリングすることができる船舶運航監視システムを提供する。
【解決手段】 GPS受信機能、インターネット接続機能、及び画像表示機能を有し、AIS非搭載船2に搭載され、インターネットを介してAIS非搭載船2の船舶情報5を発信しAIS搭載船とAIS非搭載船の総合情報6を受信する複数の船舶情報通信手段10と、インターネット接続機能を有しAIS非搭載船の船舶情報5を受信し総合情報6を発信する複数の船舶情報基地局12と、インターネット接続機能を有しAIS搭載船1からAIS情報4を受信し総合情報6を発信する複数のAIS基地局14とを備える。
(もっと読む)
物体の方位および姿勢検出装置
【課題】 フレームを用いて複数のアンテナをユニット化する必要がなく、複数のアンテナを水平面上に設置しなければならないといった設置条件を無くし、さらに通常の運用状態で短時間のうちに起動して物体の方位および姿勢を求められるようにする。
【解決手段】 船舶1の所定位置にアンテナA0,A1,A2を設置した後の初期処理で、基準アンテナA0に対する他のアンテナA1,A2の相対位置をRTK法により求めるとともに、基準アンテナA0に対するアンテナA1,A2までの距離をアンテナの配置関係として求めて保存する。その後の通常処理では、RTKなどによる相対測位によりアンテナA0,A1,A2の相対位置関係を求め、この相対位置とアンテナの配置関係に基づいて船舶の方位角および姿勢角を算出する。
(もっと読む)
船舶の入出港離着桟支援方法およびシステム
【課題】 入出港離着桟時における船舶と岸壁との位置関係、船舶の速度や方位などを容易、正確に把握できるようにする。
【解決手段】 演算制御部38の船舶位置演算部46は、現在位置演算部56がGPS衛星、静止衛星からの情報に基づいて船舶の位置を求め、距離演算部48と表示制御部50とに出力する。距離演算部48は、現在位置演算部56の求めた船舶の位置と、情報記憶部52の港湾情報記憶部60が記憶している情報とに基づいて、桟橋などと船舶との距離を求めて表示制御部50に送出する。表示制御部50は、港湾情報記憶部60、船舶情報記憶部62が記憶している情報を読み出し、表示部42に港湾施設の鳥瞰図に船舶の鳥瞰図を重ねて表示するとともに、船速検出部14の検出した船速、方位検出部16の検出した船首の方位、距離演算部48の求めた船舶と桟橋との距離などを表示する。
(もっと読む)
移動体姿勢検出装置
【課題】 測位可能な、天頂に近い2つ程度の少ない数の測位衛星からしか電波が届かないような場所であっても移動体の絶対的な姿勢を検出することができる移動体姿勢検出装置を提供する。
【解決手段】 複数の受信要素1−1〜1−3を配置してなるアンテナ1と、アンテナ1の受信要素又は移動体の位置若しくはこれを近似する概略の位置に関する情報に基づき求められる位置から測位衛星への視線方向を規定する衛星方向情報を求める衛星方向獲得手段2と、少なくとも2つの測位衛星から受信した航法電波について受信要素間の位相差をそれぞれ求め、これら位相差及び衛星方向情報に基づいて測位衛星からの航法電波を受信している少なくとも一対の受信要素の組み合わせの基線ベクトルを検出する基線ベクトル検出手段3と、基線ベクトルにより規定される姿勢を移動体の姿勢として算出する姿勢演算手段4とを備える。
(もっと読む)
ナビゲーション用途のための、改良されたGPS累積デルタ距離処理方法
移動物体の位置と速度の測定に使用されるGPSナビゲーション技術において、擬似距離(PR)測定値および累積デルタ距離(ADR)測定値が、物体において受信GPS信号から生成される。ナビゲーションパラメータ(例えば位置、速度、クロック)はPR測定値、およびADR測定値の間の差から推定される。本明細書で述べるADR測定式は、よりいっそう精密な方法で公式化され、ADR測定値の間の差を計算する時間間隔は、現在のGPS用途のADR差分手法で使用されるものよりもはるかに大きい。故にADRの差はより正確であり、非常に精密なナビゲーションソリューションを生じる。ADR差分手法はカルマンフィルター処理の収束時間短縮に寄与し、宇宙飛行体のナビゲーション精度を向上する。これらの高精度なADR処理アルゴリズムを統合型GPS/IMUナビゲーション用途に拡げるための技術も提供される。  (もっと読む)
(もっと読む)
衛星から送信される三搬送波電波信号と電離層補正とを用いるリアルタイムナビゲーションの方法およびシステム
本発明は、ユーザの位置を決定するために、衛星(SAT1−GPSEE1〜ASATn−GPSEEn)から送信される、異なる3つの周波数の三搬送波電波信号を用いて移動体(SUR)の位置を特定するリアルタイムナビゲーションの方法に関する。方法は、エクストラワイドレーン搬送波位相曖昧さを決定する第1のステップと、長経路位相曖昧さを推定する第2のステップと、複数の周波数のうちの1つの位相曖昧さを決定する第3のステップとを含む。追加ステップの1つでは、第3のステップの間に電離層補正をリアルタイムで適用する。前記電離層補正は、地上固定基準局(REF−REFE)によって計算される前記電離層の常時更新される電離層モデルに基づき、いわゆるマスタ地上固定基準局(REFM−REFME)によって計算される測地データと組み合わせられる。本発明は、前記方法を実施するためのシステムにも関する。  (もっと読む)
(もっと読む)
測距および測位方法および装置
本発明の方法および装置は、縦方向(4)および横方向(6)に延びる壁(8)および通路(10)を備えたビルディング(2)内で利用される。基地局(20、22)は、縦方向(4)および横方向(6)に向いたcosec2のパターンを有する向きのアンテナを備え、移動局(26)の位置を決定するためにその距離を測定する。  (もっと読む)
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
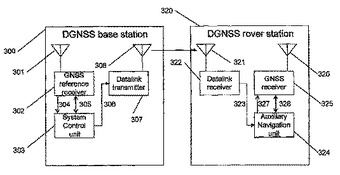
移動プラットフォームの衛星ベースの相対測位のための方法および装置
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
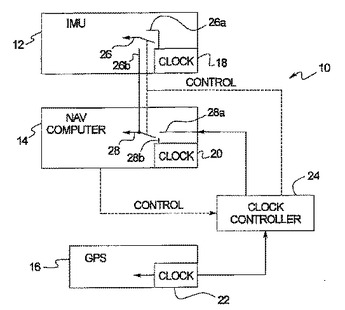
ディープインテグレーション用GPS/IMUクロック同期
航法システムは慣性計測ユニット、航法コンピュータ、GPS受信機、クロックコントローラを備える。慣性計測ユニットは第1のクロックと第1のスイッチを備え、航法コンピュータは第2のクロックと第2のスイッチを備え、GPS受信機は第3のクロックを備える。第1と第2のスイッチはクロックコントローラで制御される。このため、慣性計測ユニット、航法コンピュータ、GPS受信機においてそれぞれ自身のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータにおいて第2のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータとGPS受信機において第3のクロックを使用することができる。
 (もっと読む)
(もっと読む)
121 - 131 / 131
[ Back to top ]