
Fターム[5J062BB03]の内容
Fターム[5J062BB03]に分類される特許
1 - 20 / 170
人工衛星ベースの受信機に対するSBAS支援情報を持ったAGPSサーバ
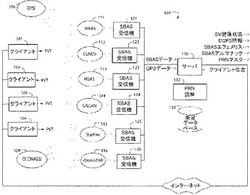
【課題】特定の地表位置から視認可能な静止衛星型衛星航法増補システム(SBAS)の情報を提供される航法受信機が、それらから視認可能なSBAS衛星の擬似乱数(PRN)信号をインテリジェントに探索、捕捉、および追跡することができるようにする。
【解決手段】人工衛星航法システム支援サーバは、クライアント位置の表示を含むクライアントの要求に応答するように構成されている。人工衛星航法システム支援サーバは、正確な位置がサーバ要求に含まれる場合には、どの特定のSBASシステムが要求中のクライアントから観測可能であるかを演算する。この場合には、その応答を、人工衛星航法システム支援サーバは、よりコンパクトな応答メッセージに対する関連情報に制限する。
(もっと読む)
対象の一つ以上の運動パラメータを得るための計算機、システム、方法およびコンピュータ・プログラム

【課題】前方散乱レーダーを使用して、飛行する対象の距離パラメータまたは速度を含む対象の軌道を決定する。
【解決手段】対象の運動パラメータ26を得るための計算機20であって、計算機20は、少なくとも2つの時間差で一つ以上の運動パラメータ26を得るように構成される。第1の時間差は対象による送受信機ラインの第1の組の通過のタイミングを示し、第2の時間差は対象による送受信機ラインの第2の組の通過のタイミングを示し、送受信機ラインの第2の組は送受信機ラインの第1の組とは異なる。
(もっと読む)
信号トランスポンダ
【課題】高精度で信号の周波数範囲を変換し、遠隔信号キャラクタリゼーションに適用可能なトランスポンダを提供することである。
【解決手段】本発明は、未知の信号源からの信号の周波数変換のための信号トランスポンダであって、未知の信号源から信号を受信するための入力手段と、受信した信号をフィルタリングするための入力フィルタと、受信した信号を増幅するための入力信号増幅器と、増幅されフィルタリングされた、受信した信号の周波数を、所定の周波数に変換するためのミキサと、周波数変換のために、ミキサに供給されるクロック信号を発生させるための局部発振器と、周波数変換された信号をフィルタリングするための出力フィルタと、周波数変換された信号を増幅するための出力信号増幅器と、フィルタリングされ増幅された、周波数変換された信号を送信するための出力手段とを備える、トランスポンダを提供する。
(もっと読む)
測位装置及び測位方法
【課題】受信状況が劣化している受信アンテナが存在している状況下でも、高精度に電波送信源の位置を測位することができるようにする。
【解決手段】STFT部5−1〜5−Nにより算出された各周波数の信号強度の統計平均及び標準偏差を求め、ある受信アンテナ2により受信された電波の振幅値に係る高周波の信号強度が統計平均より大きく、かつ、標準偏差から所定以上乖離していれば、受信アンテナ2の受信状況が劣化していると判断する統計処理部6を設け、N個の到来時刻の中から、統計処理部6により受信状況の劣化が検出された受信アンテナ2が受信している電波の到来時刻を除外する。
(もっと読む)
自動車を発見しかつ追跡するためのデバイス
【課題】衛星ナビゲーションに基づいた乗り物の発見・追跡デバイスを改善すること。
【解決手段】本発明は乗り物の発見及び追跡のためのデバイスに関し、前記デバイスは、
現在の乗り物の位置を決定するための位置決定デバイス(12)と、
通信チャネル(18)を介して現在の乗り物の位置を受信器(16)へ送信するための送信デバイス(14)と、
動作中の妨害送信器を発見するため及び妨害送信器(30)の発見が特定のアクションをトリガするための手段(20、26、28)と、を有する。
(もっと読む)
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
(もっと読む)
航空機のための交互通信
【課題】遠隔操作を行なうための双方向無線通信が不能となった場合でも、衛星受信機を介してコマンド及びコントロールメッセージを処理する航空機を提供する。
【解決手段】航空機は、メッセージ通信能を有する衛星受信機を備えている。この受信機は、交互通信が必要とされるときにコマンド及びコントロール(C2)メッセージを処理する。航空機は、更に、衛星受信機が受信したC2メッセージに含まれる命令に従って一連の動作を行うアビオニクスを備えている。
(もっと読む)
GPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラム
【課題】正確な地図データがない場合であってもGPS信号による移動体の位置決めを正確に行うことができる新規なGPS信号による移動体位置決め方法および移動体位置決定装置ならびに移動体位置決定プログラムの提供。
【解決手段】人工衛星から発信されるGPS信号を連続的に受信し、受信したGPS信号に基づいて所定時間ごとに前記移動体の位置を算定し、算定された所定時間ごとの移動体の算定位置を記憶し、記憶された移動体の算定位置同士の広がり具合に基づいて前記移動体の停止または移動を判断し、移動体が移動したと判断したときに前記移動体の位置を決定する。これによって、正確な地図データや専用のセンサがなくともGPS信号による移動体の位置決めを正確に行うことができる。
(もっと読む)
GPSモジュール、通信端末装置及び通信システム
【課題】通信端末装置の構成を単純化して、製造工程を簡易化できるGPSモジュールを提供することを目的とする。また、該GPSモジュールを備えて、通信端末装置に固有の識別符号と該通信端末装置が現に所在する地理的位置を基地局(ホスト装置)に送信する通信端末装置を提供する。
【解決手段】GPS衛星から受信した信号に基づいて、自身が現に所在する地理的位置を算出する測位演算部16を有するGPSモジュール9において、当該GPSモジュール9に固有の識別符号を記憶するID記憶部18を備える。
(もっと読む)
測位支援装置
【課題】本発明は、測位支援装置に関し、測位の精度を高めることを目的とする。
【解決手段】衛星航法に基づく測位に供される複数pの航行衛星毎に、前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
(もっと読む)
航空機位置測定システム、受信局、データ量削減方法およびプログラム
【課題】通信コストの低減と中央局の負荷の低減とを実現する。
【解決手段】複数の種類の信号のそれぞれを航空機へ向けて送信する送信局と、複数の種類の信号のそれぞれに対する複数の種類の応答信号のそれぞれを航空機から受信し、解読処理して測定用データを生成し、生成した測定用データに受信時刻情報を付与して送信する複数の受信局と、複数の測定用データを受信し、それらに付与された複数の受信時刻情報と、複数の受信局のそれぞれの位置情報とに基づいて航空機の位置を測定する中央局とを有する航空機位置測定システムにおいて、送信局は、中央局にて決定された時刻に基づいた時刻に複数の種類の信号のそれぞれを送信し、複数の受信局のそれぞれは、所定の種類の信号を送信する時刻として中央局にて決定された時刻に基づいて時間帯を設定し、所定の種類の信号に対する応答信号を上記の時間帯以外の時刻に受信した場合、当該受信した応答信号を破棄する。
(もっと読む)
地上装置
【課題】航空機が送信する信号に含まれる位置情報から、容易な構成で正確に自装置の位置を特定する。
【解決手段】距離特定手段と、位置特定手段とを備える。距離特定手段は、第1信号を送信した航空機の位置である第1送信位置から前記地上装置までの距離と、第1送信位置から移動後に第2信号を送信した当該航空機の位置である第2送信位置から前記地上装置までの距離とをそれぞれ求める。位置特定手段は、前記距離特定手段によって、航空機と前記地上装置との距離が複数求められると、求められた複数の距離を用いて当該地上装置の位置を特定する。
(もっと読む)
航空機位置測定システム、該システムに用いられる時刻同期方法及び時刻同期プログラム
【課題】航空機の位置の測定精度が向上する航空機位置測定システムを提供する。
【解決手段】航空機から送信されるスキッタ信号が各受信局51i で受信され、ターゲット処理局60により、各受信局51i の設置位置情報及び同各受信局51i でのスキッタ信号の受信時刻の差情報に基づいて、航空機の飛行位置情報(緯度情報、経度情報及び幾何学的高度情報)が求められる。この場合、各受信局51i では、時刻情報受信手段(GPS補強システム受信機52)により、衛星補強システムを構成する衛星から送信される時刻情報tmが受信される。時刻同期手段(タイミング部53、デコード部55)により、当該受信局51i で上記スキッタ信号を受信したときの受信時刻を、GPS補強システム受信機52で受信された時刻情報tmに同期させる。
(もっと読む)
移動体用測位装置及びカーナビゲーション装置
【課題】測位精度を維持しながら省電力化が可能な移動体用測位装置を提供する。
【解決手段】GPS受信器10で、GPS衛星から送信される信号を受信し、受信した信号に基づいて車両の現在位置を検出する。制御部40では、車速センサ20により検出した車両の走行速度と方位センサ30で検出した車両の方位に基づいて、車両の現在位置を推測する。推測した車両の現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正した後、GPS受信器10の電源をオフし、その時点から、車速センサ20の車速検出誤差及び方位センサ30の方位検出誤差のうち少なくとも1つの誤差の時間経過に伴う累積値に基づき、車両の推測現在位置の誤差を算出し、誤差が予め設定した許容範囲を超えたときに、GPS受信器10の電源をオンして、車両の推測現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正するという動作を繰り返す。
(もっと読む)
受信装置及びマルチラテレーションシステム
【課題】受信した信号を正確に解読し、有効な信号を使用して航空機の位置を特定する。
【解決手段】受信装置は、信号長判定手段、受渡手段、信頼性判定手段及び有効判定手段を備える。信号長判定手段は、受信信号がショートとロングのいずれであるかを判定する。受渡手段は、信号長判定手段で判定された長さの信号を後段に出力する。信頼性判定手段は、受渡手段から入力する信号のパルスのパターンを規定のパターンと比較し、受信信号の信頼性を判定する。有効判定手段は、受渡手段が出力した信号と信頼性判定手段の判定結果とが所定の条件に該当するか否かにより、受信信号が有効であるか否かを判定する。
(もっと読む)
信頼度の高いGPS測位信号のみを用いた衛星航法補強システム
【課題】 GPS衛星からの信号の信頼性を適正に判断できるようにする。
【解決手段】 衛星航法補強システム2にGPS衛星4からの信号に基づき擬似距離が測定された際の搬送波電力対雑音電力密度比(C/No)の値が適正であるか否かを判定するためのモニタ閾値を算出する閾値算出部32と、C/No値とモニタ閾値とを比較して、擬似距離が適正な精度を持つか否かを判定する擬似距離判定部33と、を設ける。
(もっと読む)
GPS衛星位置算出方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的にGPS衛星の位置検出精度の改善が可能な技術を提供する
【解決手段】GPS衛星位置算出装置10は、GPS衛星から発せられる信号に含まれる軌道速度vと時刻tbとから、基準点の位置Oが信号を受信した時刻trでのGPS衛星の位置Bを算出し、このGPS衛星の位置Bと基準点の位置Oとを結ぶ線分に対する地平線の角度αを算出し(S106)、算出した基準点の位置OからGPS衛星の位置Bまでの距離ctと、取得した高度hと、算出した角度αとに基づき、基準点の位置Oから信号を発信した時刻におけるGPS衛星の位置Aまでの距離csを疑似距離として算出し(S107)、これを用いてGPS衛星の位置Aを算出する(S108)。
(もっと読む)
GPS測位演算方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的に測定点での測位精度の改善が可能な技術を提供する。
【解決手段】GPS測位演算装置10は、GPS衛星から発せられる信号に含まれる軌道情報から、信号発信時点でのGPS衛星の、位置Aと、軌道速度vと、時刻tbと、高度hに関する軌道情報を取得し(S105)、軌道速度vと時刻tbとから、測定点が信号を受信した時刻trでのGPS衛星の位置Bを時刻差t=tr−tbから算出し(S106)、GPS衛星の位置Bと測定点の位置Oとを結ぶ第1の線分に対する地平線の第1の角度αを第1の線分の距離ctと高度hから算出し(S107)、第1の線分の距離ctと、第1の角度αと、軌道速度vとに基づき、GPS衛星の位置Aと測定点の位置Oとを結ぶ第2の線分の距離csを算出し(S107)、測位演算を行う(S111)。
(もっと読む)
GPS測位演算方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的に測定点での測位精度の改善が可能な技術を提供する。
【解決手段】GPS衛星21〜23から発せられる信号を受信して測定点の位置測位を行うGPS測位演算方法であって、GPS測位演算装置10は、受信した信号に含まれる航法データから、GPS衛星が信号を発信した時点におけるGPS衛星の、位置Aと、時刻tbと、軌道速度vとを含む軌道情報を取得し(S105)、測定点が信号を受信した時刻trでのGPS衛星の位置Bを時刻差t=tr−tbから算出し(S106)、ここで算出したGPS衛星の位置Bと測定点の位置Oとを結ぶ線分の距離ctを疑似距離として算出して(S107)、測位演算を行う(S111)。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
1 - 20 / 170
[ Back to top ]